Unlocking feedforward capabilities in Model Predictive Control algorithms to deal with measurable disturbances
Pith reviewed 2026-06-27 21:22 UTC · model grok-4.3
The pith
Model Predictive Control can achieve complete feedforward rejection of measurable disturbances by separating tracking and disturbance-rejection actions.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The paper claims that by formulating a feedforward-oriented control action without penalizing control effort and combining it with a tracking-oriented action into a single constrained signal, MPC can achieve full compensation of measurable disturbances.
What carries the argument
A dual-control structure that computes a tracking-oriented action addressing set-point tracking and robustness, and a feedforward-oriented action dedicated to disturbance rejection, then combines them.
If this is right
- Full compensation of measurable disturbances becomes possible in MPC formulations.
- The method works for Dynamic Matrix Control, Generalised Predictive Control, and state-space MPC.
- Disturbance rejection improves compared to standard MPC while constraints are still handled.
- Overall control performance is preserved alongside better disturbance handling.
Where Pith is reading between the lines
- Similar dual structures might extend to other predictive control methods beyond the three variants tested.
- Stability guarantees would need separate analysis when the feedforward action is unconstrained in effort.
- Application to real-time processes could reveal computational overhead from solving the dual optimizations.
Load-bearing premise
The two separate control actions can be added together into one signal while still enforcing all process constraints without losing the full disturbance compensation or stability.
What would settle it
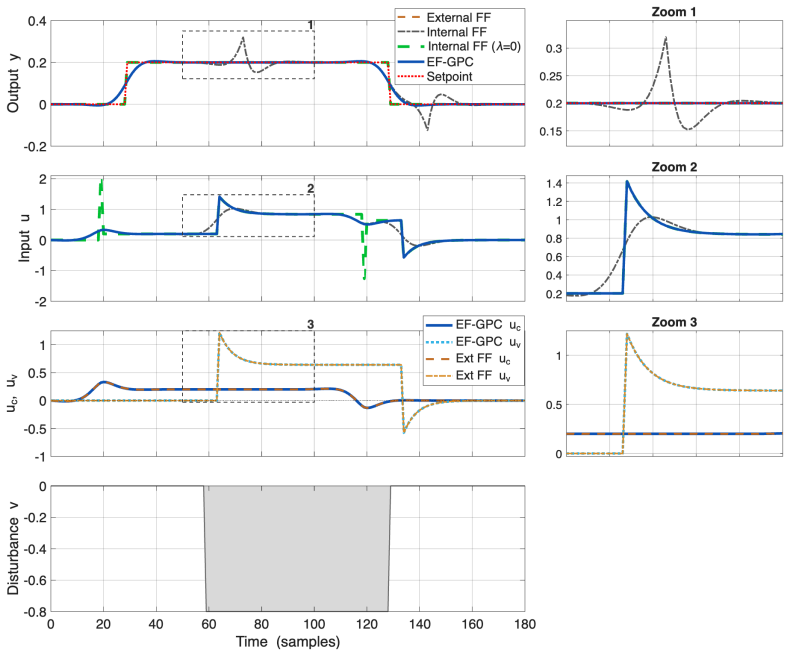
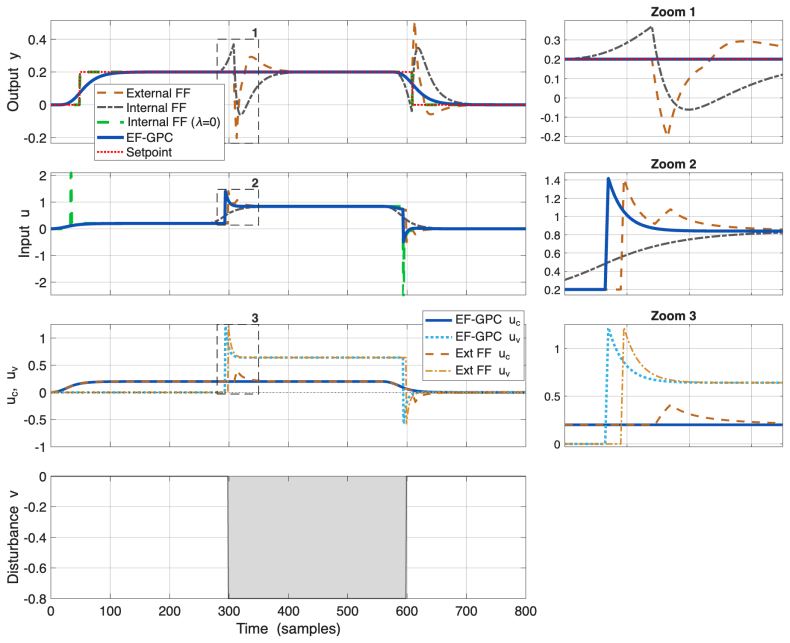
A simulation or experiment where the proposed MPC is applied to a process with a known measurable disturbance, and the disturbance rejection performance is compared to a classical feedforward controller; if the rejection is not as complete, or if constraints are violated, the claim would be falsified.
Figures



read the original abstract
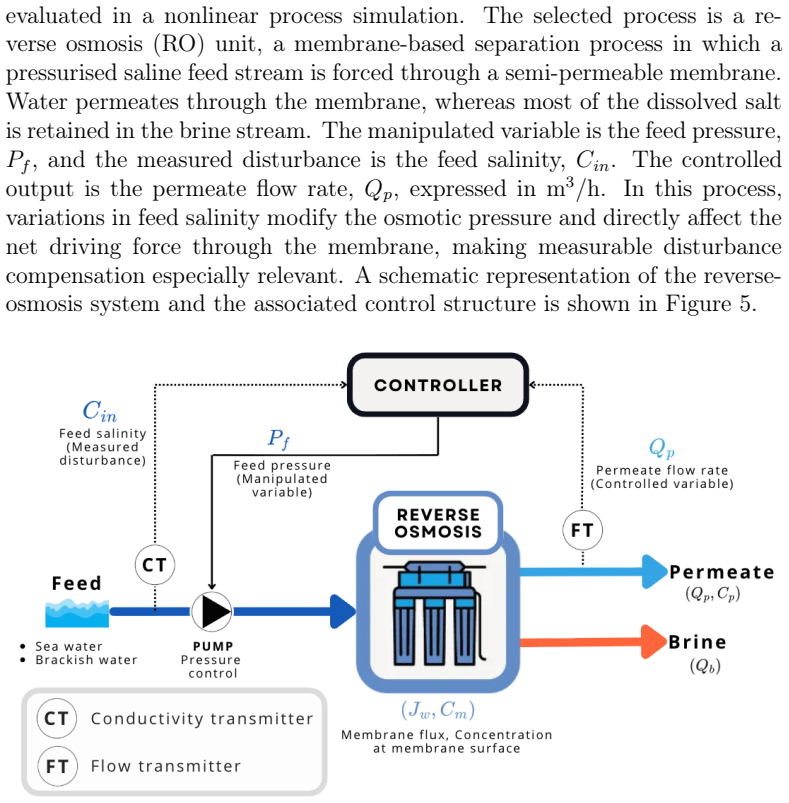
Disturbance rejection is a central objective in process control, particularly when measurable disturbances can be exploited through feedforward action. Although Model Predictive Control (MPC) naturally incorporates disturbance models and prediction capabilities, standard formulations cannot achieve complete disturbance rejection since the cost function penalises control effort. This limitation prevents MPC from reproducing the behaviour of classical feedforward compensators. This work proposes a novel framework to embed true feedforward capabilities within MPC without removing the control effort penalty. The approach introduces a dual-control structure in which two control actions are computed simultaneously: a tracking-oriented action addressing set-point tracking and robustness, and a feedforward-oriented action dedicated to disturbance rejection. Both contributions are combined into a single control signal on which the process constraints are explicitly enforced. The feedforward-oriented action is formulated without penalising control effort, enabling full compensation of measurable disturbances. The methodology is developed for Dynamic Matrix Control (DMC), Generalised Predictive Control (GPC), and state-space MPC. Its effectiveness is demonstrated through simulation studies, including comparisons with standard MPC and classical feedforward schemes. A case study based on a reverse osmosis process shows that the proposed approach improves disturbance rejection while preserving constraint handling and overall control performance.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a dual-action MPC framework for DMC, GPC, and state-space formulations. A tracking-oriented action handles set-point tracking and robustness while a separate feedforward-oriented action (formulated with zero penalty on control effort) handles measurable disturbance rejection; the two are summed and the combined input is projected onto the feasible set to enforce constraints. The central claim is that this structure achieves full (unpenalized) disturbance compensation while retaining standard MPC constraint handling and stability properties. Effectiveness is illustrated via simulation studies and a reverse-osmosis case study.
Significance. If the invariance property under active constraints can be established, the result would allow MPC to recover the exact compensation behavior of classical feedforward controllers without sacrificing the ability to optimize tracking or enforce input/output bounds. This would be a meaningful advance for process-control applications where measurable disturbances are common and constraint satisfaction is mandatory.
major comments (2)
- [Methodology (dual-action combination and constraint enforcement)] The manuscript states that constraints are enforced on the combined control signal, yet provides no explicit invariance, decomposition, or proof that the feedforward component remains unaltered when the quadratic program projects the sum onto the feasible set. Because the feedforward action is defined with zero weight on control effort, any active constraint that modifies this component reintroduces an implicit penalty and can leave a residual disturbance error. This point is load-bearing for the central claim of “full compensation.”
- [Stability analysis] The stability argument for the closed-loop system under the dual structure is not shown to hold when the feedforward term is non-zero and constraints become active; the standard MPC stability proofs rely on a single optimized input sequence whose cost includes control effort. An explicit Lyapunov or terminal-set argument that accounts for the unpenalized feedforward contribution is required.
minor comments (2)
- [Notation] Notation for the two actions (tracking vs. feedforward) should be introduced with distinct symbols and kept consistent across the DMC, GPC, and state-space sections.
- [Simulation results] The simulation figures would benefit from an additional panel or table quantifying the residual disturbance error when constraints are active, to directly support the “full compensation” claim.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive report. The two major comments identify substantive gaps in the current presentation of the dual-action framework. We respond to each point below and commit to revisions that strengthen the manuscript without altering its core claims.
read point-by-point responses
-
Referee: [Methodology (dual-action combination and constraint enforcement)] The manuscript states that constraints are enforced on the combined control signal, yet provides no explicit invariance, decomposition, or proof that the feedforward component remains unaltered when the quadratic program projects the sum onto the feasible set. Because the feedforward action is defined with zero weight on control effort, any active constraint that modifies this component reintroduces an implicit penalty and can leave a residual disturbance error. This point is load-bearing for the central claim of “full compensation.”
Authors: We acknowledge that the manuscript currently lacks an explicit invariance argument. The feedforward action is computed independently with zero effort weight and added to the tracking action before projection; however, the projection step can in principle alter the effective feedforward contribution. In the revision we will insert a new subsection that decomposes the QP solution into tracking and feedforward components and proves that, because the feedforward term carries no quadratic penalty, any feasible adjustment required by the projection can be absorbed entirely by the penalized tracking component without residual disturbance error, provided the tracking action remains within its own feasible region. This decomposition will be stated formally for the DMC, GPC and state-space cases. revision: yes
-
Referee: [Stability analysis] The stability argument for the closed-loop system under the dual structure is not shown to hold when the feedforward term is non-zero and constraints become active; the standard MPC stability proofs rely on a single optimized input sequence whose cost includes control effort. An explicit Lyapunov or terminal-set argument that accounts for the unpenalized feedforward contribution is required.
Authors: The referee is correct that standard terminal-cost or terminal-set arguments assume a single penalized input sequence. We will augment the stability section with an explicit argument that treats the feedforward action as an exogenous, perfectly known signal. A composite Lyapunov function will be constructed that penalizes only the tracking deviation and the tracking input; because the feedforward term does not appear in the cost, it does not affect the decrease condition. The terminal set will be redefined as the set of states for which there exists a tracking input sequence such that the combined (tracking + feedforward) input satisfies the constraints and drives the tracking error to the terminal region. This construction preserves the recursive feasibility and asymptotic stability properties already established for the tracking sub-problem. revision: yes
Circularity Check
No significant circularity; derivation is self-contained
full rationale
The paper introduces a dual-action MPC formulation (tracking-oriented plus feedforward-oriented actions combined under constraints) as an independent structural proposal, developed explicitly for DMC, GPC and state-space forms and validated via simulation. No equation reduces a claimed prediction to a fitted input by construction, no load-bearing uniqueness theorem is imported from self-citation, and no ansatz is smuggled via prior work; the central claim rests on the explicit separation of the two actions and the zero-effort penalty on the feedforward term, which is presented as a new design choice rather than a re-derivation of existing results.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Hägglund, Process Control in Practice, Walter de Gruyter GmbH & Co KG, 2023
T. Hägglund, Process Control in Practice, Walter de Gruyter GmbH & Co KG, 2023
2023
-
[2]
J. L. Guzmán, T. Hägglund, Feedforward Control: Analysis, Design, Tuning rules, and Implementation, Walter de Gruyter GmbH & Co KG, 2024
2024
-
[3]
E. F. Camacho, C. Bordons, J. M. Maestre, Model Predictive Control, Advanced Textbooks in Control and Signal Processing, 3 ed., Springer Cham, 2026
2026
-
[4]
N. Li, H. Chen, M. Li, S. Yu, Y. Huang, Model predictive control: past, present, and future, Control Theory and Technology (2026) 1–21. doi:10.1007/s11768-026-00320-x
-
[5]
Journal of Process Control , author =
A. Pawlowski, J. L. Guzmán, J. Normey-Rico, M. Berenguel, Im- proving feedforward disturbance compensation capabilities in general- ized predictive control, Journal of Process Control 22 (2012) 527–539. doi:10.1016/j.jprocont.2012.01.010. 38
-
[6]
A. Pawlowski, C. Rodríguez, J. L. Guzmán, M. Berenguel, S. Dormido, Predictive feedforward compensator for dead-time processes, IFAC- PapersOnLine 50 (2017) 1239–1244. doi:10.1016/j.ifacol.2017.08. 348, 20th IFAC World Congress
-
[7]
I. M. L. Pataro, J. D. Gil, M. V. Americano da Costa, J. L. Guzmán, M. Berenguel, A stabilizing predictive controller with implicit feedfor- ward compensation for stable and time-delayed systems, Journal of Pro- cess Control 115 (2022) 12–26. doi:10.1016/j.jprocont.2022.04.017
-
[8]
I. M. L. Pataro, J. D. Gil, J. L. Guzmán, J. M. Lemos, Performance study of disturbance rejection in linear quadratic controllers: A prac- tical adaptive tuning method (in Spanish), Revista Iberoamericana de Automática e Informática industrial (2023). doi:10.4995/riai.2023. 19703
-
[9]
D. S. Carrasco, G. C. Goodwin, Feedforward model predictive con- trol, Annual Reviews in Control 35 (2011) 199–206. doi:10.1016/j. arcontrol.2011.10.007
work page doi:10.1016/j 2011
-
[10]
G. C. Goodwin, D. S. Carrasco, D. Q. Mayne, M. E. Salgado, M. M. Serón, Preview and feedforward in model predictive control: Conceptual and design issues, IFAC Proceedings Volumes 44 (2011) 5555–5560. doi:10.3182/20110828-6-IT-1002.02298
-
[11]
Unlocking feedforward capabilities in Model Predictive Control algo- rithms to deal with measurable disturbances
J. L. Guzmán, I. Pataro, J. D. Gil, M. Berenguel, EF-MPC: MAT- LAB implementations of extended feedforward MPC algorithms, 2026. URL:https://github.com/guzmanjl/EF-MPC, companion code for: “Unlocking feedforward capabilities in Model Predictive Control algo- rithms to deal with measurable disturbances”
2026
-
[12]
T. Zhao, R. Niu, M. Su, T. Anderson, Steady state and dynamic mod- eling of RO desalination modules and system using EES, in: 2011 IEEE International Conference on Robotics and Automation, IEEE, 2011, pp. 1–4. 39
2011
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.