Constraint residuals, graph posteriors, and determinant-corrected full-space targets in Bayesian inverse problems
Pith reviewed 2026-06-27 14:39 UTC · model grok-4.3
The pith
Residual penalties in full-space Bayesian inverse problems converge to a posterior differing from the reduced graph posterior by a determinant factor unless corrected.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
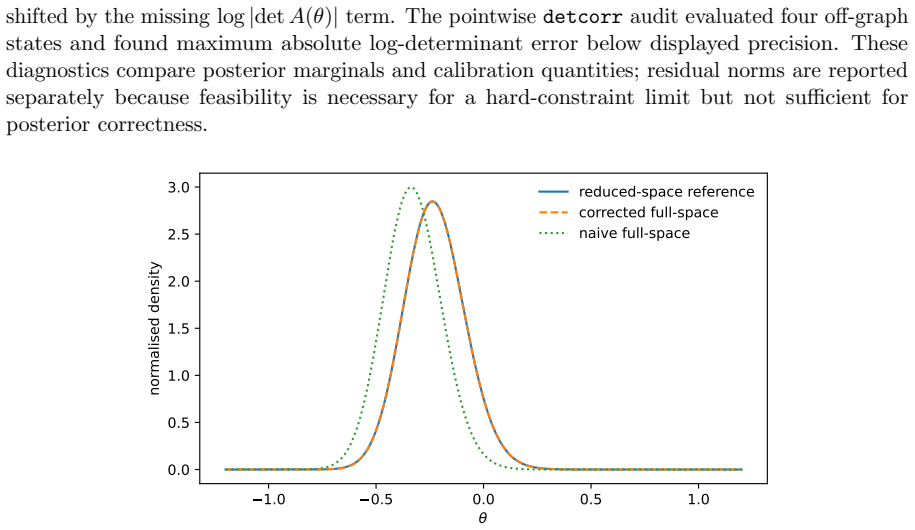
In finite-dimensional equality-constrained Bayesian inverse problems, the reduced posterior on parameters θ, its graph lift to the manifold u = G(θ), and the zero-noise limit of a residual-penalized full-space posterior are distinct measures. An uncorrected Gaussian residual penalty converges after marginalization over u to the reduced posterior density multiplied by |det D_u c(θ, G(θ))|^{-1}. Determinant corrections applied to unweighted, weighted, and rescaled residual penalties recover the graph-lifted reduced posterior as the hard-constraint limit.
What carries the argument
The Jacobian determinant |det D_u c(θ, G(θ))| arising from the local change of variables between full-space (θ, u) coordinates and the reduced parameter space.
If this is right
- Algebraically equivalent residual formulations can share the same feasible set yet induce different limiting posteriors.
- Driving the residual to zero is not sufficient to sample exactly from the graph-lifted reduced posterior without a matching density correction.
- Corrected residual penalties allow full-space samplers to target the desired reduced posterior in the hard-constraint limit.
Where Pith is reading between the lines
- Existing full-space MCMC methods that rely on residual penalties may be sampling from a measure that differs from the intended reduced posterior by a state-Jacobian factor.
- The separation of feasibility from density calibration suggests that similar determinant adjustments could be needed when residual penalties are used inside optimization-based or variational inference schemes.
Load-bearing premise
The state equation has a unique solution u = G(θ) for each parameter value together with a nonsingular state Jacobian.
What would settle it
For a low-dimensional test problem with an analytically known reduced posterior, compare the marginal obtained from an uncorrected residual-penalized sampler against the true reduced density and check whether they differ by exactly the predicted determinant factor.
Figures

read the original abstract
Bayesian inverse problems constrained by state equations are often sampled in a full parameter-state space by penalising the residual, rather than in a reduced space where the state is eliminated. We show that these formulations are not automatically equivalent as posterior measures. For finite-dimensional discretisations of equality-constrained inverse problems, assume the state equation \(c(\theta,u)=0\) has a unique solution \(u=G(\theta)\) and nonsingular state Jacobian \(\D_u c\). The reduced posterior, its graph lift, and the zero-noise residual posterior are then distinct. A local change of variables shows that an uncorrected Gaussian residual penalty converges, after marginalisation over \(u\), to the reduced density multiplied by \(\abs{\det \D_u c(\theta,G(\theta))}^{-1}\). Thus algebraically equivalent residuals can define the same feasible set but different limiting posteriors. We derive determinant corrections for unweighted, weighted, and rescaled residual penalties that have the graph-lifted reduced posterior as their hard-constraint limit. The result separates feasibility from posterior calibration: driving the residual to zero is not sufficient for exact sampling of the graph-lifted reduced posterior unless the sampling or correction step targets the corresponding corrected density.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper shows that, for finite-dimensional discretizations of equality-constrained Bayesian inverse problems where the state equation c(θ,u)=0 admits a unique solution u=G(θ) with nonsingular Jacobian D_u c, the reduced posterior, its graph lift, and the zero-noise residual posterior in the full (θ,u) space are distinct measures. A local change-of-variables argument establishes that an uncorrected Gaussian residual penalty, after marginalization over u, converges to the reduced density multiplied by |det D_u c(θ,G(θ))|^{-1}. Determinant corrections are derived for unweighted, weighted, and rescaled residual penalties so that their hard-constraint limits recover the graph-lifted reduced posterior. The central message is that algebraic feasibility (zero residual) does not automatically yield the correct posterior calibration.
Significance. If the change-of-variables derivation holds, the result is significant for the theory and practice of constrained Bayesian inverse problems: it rigorously separates the algebraic constraint set from the measure-theoretic target and supplies explicit corrections that can be implemented in full-space sampling algorithms. The argument relies only on the implicit-function theorem and standard Lebesgue-measure transformation, which are standard tools and therefore reproducible; the explicit determinant factors constitute falsifiable predictions for the limiting behavior of residual-based samplers.
minor comments (2)
- §2: the definition of the graph lift could be stated as an explicit push-forward measure rather than left implicit, to make the distinction from the reduced posterior immediate.
- The abstract and introduction both use the phrase 'graph-lifted reduced posterior'; a single sentence in §1 that equates this object to the push-forward of the reduced density under θ ↦ (θ,G(θ)) would improve readability.
Simulated Author's Rebuttal
We thank the referee for the accurate summary of our results and for the positive recommendation to accept the manuscript. The referee's assessment correctly identifies the central distinction between algebraic feasibility and measure-theoretic calibration that the paper establishes.
Circularity Check
No significant circularity; derivation uses standard change-of-variables and implicit-function theorem
full rationale
The paper's central result follows directly from the implicit function theorem (unique u = G(θ) with nonsingular D_u c) and the standard transformation rule for Lebesgue measure under a local diffeomorphism. The factor |det D_u c(θ, G(θ))|^{-1} appears as the Jacobian determinant of the graph map, which is an immediate algebraic consequence of the assumed nonsingularity and is not obtained by fitting, self-definition, or any self-citation chain. The separation between the zero-residual feasible set and the corrected posterior measure is likewise a direct consequence of marginalization over the state variable; no step reduces the claimed limit to an input quantity by construction. The argument is scoped to finite-dimensional discretizations and invokes only textbook measure-theoretic facts.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption The state equation c(θ,u)=0 has a unique solution u=G(θ)
- domain assumption The state Jacobian D_u c is nonsingular
Reference graph
Works this paper leans on
-
[1]
Inversion of seismic reflection data in the acoustic approximation
Albert Tarantola. Inversion of seismic reflection data in the acoustic approximation. Geophysics, 49(8):1259–1266, 1984.doi:10.1190/1.1441754
-
[2]
Tarantola,Inverse Problem Theory and Methods for Model Parameter Estimation
Albert Tarantola.Inverse Problem Theory and Methods for Model Parameter Estimation. SIAM, 2005.doi:10.1137/1.9780898717921
-
[3]
Jean Virieux and St´ ephane Operto. An overview of full-waveform inversion in exploration geophysics.Geophysics, 74(6):WCC1–WCC26, 2009.doi:10.1190/1.3238367
-
[4]
Springer, 2005.doi:10.1007/b138659
Jari Kaipio and Erkki Somersalo.Statistical and Computational Inverse Problems. Springer, 2005.doi:10.1007/b138659
-
[5]
Andrew M. Stuart. Inverse problems: a Bayesian perspective.Acta Numerica, 19:451–559, 2010.doi:10.1017/S0962492910000061
-
[6]
Inverse problems in the Bayesian framework.Inverse Problems, 30(11):110301, 2014
Daniela Calvetti, Jari Kaipio, and Erkki Somersalo. Inverse problems in the Bayesian framework.Inverse Problems, 30(11):110301, 2014. doi:10.1088/0266-5611/30/11/ 110301
-
[7]
Masoumeh Dashti and Andrew M. Stuart. The Bayesian approach to inverse problems. InHandbook of Uncertainty Quantification, pages 311–428. Springer, 2017. doi:10.1007/ 978-3-319-12385-1_7
2017
-
[8]
SIAM Journal on Scientific Computing , volume =
Tan Bui-Thanh, Omar Ghattas, James Martin, and Georg Stadler. A computational framework for infinite-dimensional Bayesian inverse problems. Part I: The linearized case, with application to global seismic inversion.SIAM Journal on Scientific Computing, 35(6):A2494–A2523, 2013.doi:10.1137/12089586X
-
[9]
H. P. Flath, L. C. Wilcox, V. Akcelik, J. Hill, B. van Bloemen Waanders, and O. Ghattas. Fast algorithms for Bayesian uncertainty quantification in large-scale linear inverse problems based on low-rank partial hessian approximations.SIAM Journal on Scientific Computing, 33(1):407–432, 2011.doi:10.1137/090780717
-
[10]
Wilcox, Carsten Burstedde, and Omar Ghattas
James Martin, Lucas C. Wilcox, Carsten Burstedde, and Omar Ghattas. A stochastic Newton MCMC method for large-scale statistical inverse problems with application to seismic inversion.SIAM Journal on Scientific Computing, 34(3):A1460–A1487, 2012. doi:10.1137/110845598
-
[11]
A computational framework for infinite-dimensional Bayesian inverse problems
Noemi Petra, James Martin, Georg Stadler, and Omar Ghattas. A computational framework for infinite-dimensional Bayesian inverse problems. Part II: Stochastic Newton MCMC with application to ice sheet flow inverse problems.SIAM Journal on Scientific Computing, 36(4):A1525–A1555, 2014.doi:10.1137/130934805
-
[12]
Tiangang Cui, James Martin, Youssef M. Marzouk, Antti Solonen, and Alessio Spantini. Likelihood-informed dimension reduction for nonlinear inverse problems.Inverse Problems, 30(11):114015, 2014.doi:10.1088/0266-5611/30/11/114015. 20
-
[13]
Tiangang Cui, Kody J. H. Law, and Youssef M. Marzouk. Dimension-independent likelihood- informed MCMC.Journal of Computational Physics, 304:109–137, 2016. doi:10.1016/j. jcp.2015.10.008
work page doi:10.1016/j 2016
-
[14]
Eldad Haber and Uri M. Ascher. Preconditioned all-at-once methods for large, sparse parameter estimation problems.Inverse Problems, 17(6):1847–1864, 2001. doi:10.1088/ 0266-5611/17/6/319
2001
-
[15]
Springer, 2009.doi:10.1007/978-1-4020-8839-1
Michael Hinze, Ren´ e Pinnau, Michael Ulbrich, and Stefan Ulbrich.Optimization with PDE Constraints. Springer, 2009.doi:10.1007/978-1-4020-8839-1
-
[16]
SIAM, 2012.doi:10.1137/1.9781611972054
Alfio Borz` ı and Volker Schulz.Computational Optimization of Systems Governed by Partial Differential Equations. SIAM, 2012.doi:10.1137/1.9781611972054
-
[17]
Michele Benzi, Gene H. Golub, and J¨ org Liesen. Numerical solution of saddle point problems. Acta Numerica, 14:1–137, 2005.doi:10.1017/S0962492904000212
-
[18]
Herrmann
Tristan van Leeuwen and Felix J. Herrmann. A penalty method for PDE-constrained optimization in inverse problems.Inverse Problems, 32(1):015007, 2016. doi:10.1088/ 0266-5611/32/1/015007
2016
-
[19]
Tan Bui-Thanh and Mark Girolami. Solving large-scale PDE-constrained Bayesian in- verse problems with Riemann manifold Hamiltonian Monte Carlo.Inverse Problems, 30(11):114014, 2014.doi:10.1088/0266-5611/30/11/114014
-
[20]
Simon L. Cotter, Gareth O. Roberts, Andrew M. Stuart, and David White. MCMC methods for functions: modifying old algorithms to make them faster.Statistical Science, 28(3):424–446, 2013.doi:10.1214/13-STS421
-
[21]
Alexandros Beskos, Frank J. Pinski, J. M. Sanz-Serna, and Andrew M. Stuart. Hybrid Monte Carlo on Hilbert spaces.Stochastic Processes and their Applications, 121(10):2201–2230, 2011.doi:10.1016/j.spa.2011.06.003
-
[22]
Martin Hairer, Andrew M. Stuart, and Sebastian J. Vollmer. Spectral gaps for a Metropolis– Hastings algorithm in infinite dimensions.Annals of Applied Probability, 24(6):2455–2490, 2014.doi:10.1214/13-AAP982
-
[23]
Kody J. H. Law. Proposals which speed up function-space MCMC.Journal of Computational and Applied Mathematics, 262:127–138, 2014.doi:10.1016/j.cam.2013.07.026
-
[24]
Tan Bui-Thanh and Quoc P. Nguyen. FEM-based discretization-invariant MCMC methods for PDE-constrained Bayesian inverse problems.Inverse Problems and Imaging, 10(4):943– 975, 2016.doi:10.3934/ipi.2016028
-
[25]
Mark Girolami and Ben Calderhead. Riemann manifold Langevin and Hamiltonian Monte Carlo methods.Journal of the Royal Statistical Society: Series B, 73(2):123–214, 2011. doi:10.1111/j.1467-9868.2010.00765.x
-
[26]
Alexandros Beskos, Mark Girolami, Shiwei Lan, Patrick E. Farrell, and Andrew M. Stuart. Geometric MCMC for infinite-dimensional inverse problems.Journal of Computational Physics, 335:327–351, 2017.doi:10.1016/j.jcp.2016.12.041
-
[27]
Persi Diaconis, Susan Holmes, and Mehrdad Shahshahani. Sampling from a manifold. In Advances in Modern Statistical Theory and Applications: A Festschrift in Honor of Morris L. Eaton, volume 10 ofInstitute of Mathematical Statistics Collections, pages 102–125. Institute of Mathematical Statistics, 2013.doi:10.1214/12-IMSCOLL1006. 21
-
[28]
Simon Byrne and Mark Girolami. Geodesic Monte Carlo on embedded manifolds.Scandi- navian Journal of Statistics, 40(4):825–845, 2013.doi:10.1111/sjos.12036
-
[29]
Emilio Zappa, Miranda Holmes-Cerfon, and Jonathan Goodman. Monte Carlo on mani- folds: sampling densities and integrating functions.Communications on Pure and Applied Mathematics, 71(12):2609–2647, 2018.doi:10.1002/cpa.21783
-
[30]
Tony Leli` evre, Mathias Rousset, and Gabriel Stoltz. Hybrid Monte Carlo methods for sampling probability measures on submanifolds.Numerische Mathematik, 143(2):379–421, 2019.doi:10.1007/s00211-019-01056-4
-
[31]
Matthew M. Graham, Alexandre H. Thiery, and Alexandros Beskos. Manifold Markov chain Monte Carlo methods for Bayesian inference in diffusion models.Journal of the Royal Statistical Society: Series B, 84(4):1229–1256, 2022.doi:10.1111/rssb.12497
-
[32]
Jonathan Eckstein and Dimitri P. Bertsekas. On the Douglas–Rachford splitting method and the proximal point algorithm for maximal monotone operators.Mathematical Programming, 55:293–318, 1992.doi:10.1007/BF01581204
-
[33]
Stephen Boyd, Neal Parikh, Eric Chu, Borja Peleato, and Jonathan Eckstein. Distributed optimization and statistical learning via the alternating direction method of multipliers. Foundations and Trends in Machine Learning, 3(1):1–122, 2011. doi:10.1561/2200000016
-
[34]
Neal Parikh and Stephen Boyd. Proximal algorithms.Foundations and Trends in Opti- mization, 1(3):127–239, 2014.doi:10.1561/2400000003
-
[35]
Efficient MCMC sampling with dimension- free convergence rate using ADMM-type splitting.Journal of Machine Learning Research, 23(25):1–69, 2022
Maxime Vono, Daniel Paulin, and Arnaud Doucet. Efficient MCMC sampling with dimension- free convergence rate using ADMM-type splitting.Journal of Machine Learning Research, 23(25):1–69, 2022. URL:https://jmlr.org/papers/v23/20-357.html
2022
-
[36]
Stein variational gradient descent: a general purpose Bayesian inference algorithm
Qiang Liu and Dilin Wang. Stein variational gradient descent: a general purpose Bayesian inference algorithm. InAdvances in Neural Information Processing Systems, volume 29, pages 2370–2378, 2016. URL: https://proceedings.neurips.cc/paper/2016/hash/ b3ba8f1bee1238a2f37603d90b58898d-Abstract.html
2016
-
[37]
Junxiong Jia, Peijun Li, and Deyu Meng. Stein variational gradient descent on infinite- dimensional space and applications to statistical inverse problems.SIAM Journal on Numerical Analysis, 60(4):2225–2252, 2022.doi:10.1137/21M1440773
-
[38]
Dual-space posterior sampling for Bayesian inference in constrained inverse problems, 2026
Ali Siahkoohi, Kamal Aghazade, and Ali Gholami. Dual-space posterior sampling for Bayesian inference in constrained inverse problems, 2026. Preprint arXiv:2603.00393. arXiv:2603.00393,doi:10.48550/arXiv.2603.00393
-
[39]
Scalable Bayesian full waveform inversion via dual augmented Lagrangian SVGD, 2026
Kamal Aghazade, Ali Siahkoohi, and Ali Gholami. Scalable Bayesian full waveform inversion via dual augmented Lagrangian SVGD, 2026. Preprint arXiv:2603.24751. arXiv: 2603.24751,doi:10.48550/arXiv.2603.24751
-
[40]
Lee.Introduction to Smooth Manifolds, volume 218 ofGraduate Texts in Mathe- matics
John M. Lee.Introduction to Smooth Manifolds, volume 218 ofGraduate Texts in Mathe- matics. Springer, second edition, 2013.doi:10.1007/978-1-4419-9982-5
-
[41]
1996, Geometric Measure Theory, Classics in Mathematics (Springer-Verlag)
Herbert Federer.Geometric Measure Theory, volume 153 ofGrundlehren der mathematischen Wissenschaften. Springer, 1969. Reprinted in the Classics in Mathematics series, Springer, 1996.doi:10.1007/978-3-642-62010-2
-
[42]
Lawrence C. Evans and Ronald F. Gariepy.Measure Theory and Fine Properties of Functions. CRC Press, revised edition, 2015.doi:10.1201/b18333. 22
-
[43]
Joseph T. Chang and David Pollard. Conditioning as disintegration.Statistical Science, 51(3):287–317, 1997.doi:10.1111/1467-9574.00056
-
[44]
Marshall Fixman. Classical statistical mechanics of constraints: a theorem and application to polymers.Proceedings of the National Academy of Sciences of the United States of America, 71(8):3050–3053, 1974.doi:10.1073/pnas.71.8.3050
-
[45]
Jian Xu, Delu Zeng, John Paisley, and Qibin Zhao. The right measure for physics- constrained generation: a co-area correction for posterior-consistent PDE inverse problems, 2026.doi:10.48550/arXiv.2606.04804
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv.2606.04804 2026
-
[46]
Journal of Optimization Theory and Applications 4: 303--320
Magnus R. Hestenes. Multiplier and gradient methods.Journal of Optimization Theory and Applications, 4:303–320, 1969.doi:10.1007/BF00927673
-
[47]
R. Tyrrell Rockafellar. Augmented Lagrange multiplier functions and duality in nonconvex programming.SIAM Journal on Control, 12(2):268–285, 1974.doi:10.1137/0312021
-
[48]
A First–Order Primal–Dual Algo- rithm for Convex Problems with Applications to Imaging
Antonin Chambolle and Thomas Pock. A first-order primal-dual algorithm for convex problems with applications to imaging.Journal of Mathematical Imaging and Vision, 40:120–145, 2011.doi:10.1007/s10851-010-0251-1
-
[49]
Radford M. Neal. Annealed importance sampling.Statistics and Computing, 11:125–139, 2001.doi:10.1023/A:1008923215028
-
[50]
Nicolas Chopin. A sequential particle filter method for static models.Biometrika, 89(3):539– 552, 2002.doi:10.1093/biomet/89.3.539
-
[51]
E., Ercolano, B., & Bonnell, I
Pierre Del Moral, Arnaud Doucet, and Ajay Jasra. Sequential Monte Carlo samplers. Journal of the Royal Statistical Society: Series B, 68(3):411–436, 2006. doi:10.1111/j. 1467-9868.2006.00553.x
work page doi:10.1111/j 2006
-
[52]
Alexandros Beskos, Ajay Jasra, Ege A. Muzaffer, and Andrew M. Stuart. Sequential Monte Carlo methods for Bayesian elliptic inverse problems.Statistics and Computing, 25(4):727–737, 2015.doi:10.1007/s11222-015-9556-7
-
[53]
Nicholas Metropolis, Arianna W. Rosenbluth, Marshall N. Rosenbluth, Augusta H. Teller, and Edward Teller. Equation of state calculations by fast computing machines.Journal of Chemical Physics, 21(6):1087–1092, 1953.doi:10.1063/1.1699114
-
[54]
W. Keith Hastings. Monte Carlo sampling methods using Markov chains and their applica- tions.Biometrika, 57(1):97–109, 1970.doi:10.1093/biomet/57.1.97
-
[55]
Simon Duane, Anthony D. Kennedy, Brian J. Pendleton, and Duncan Roweth. Hybrid Monte Carlo.Physics Letters B, 195(2):216–222, 1987.doi:10.1016/0370-2693(87)91197-X
-
[56]
Radford M. Neal. MCMC using Hamiltonian dynamics. In Steve Brooks, Andrew Gelman, Galin Jones, and Xiao-Li Meng, editors,Handbook of Markov Chain Monte Carlo, pages 113–162. CRC Press, 2011.doi:10.1201/b10905-6
-
[57]
Jean-Paul Ryckaert, Giovanni Ciccotti, and Herman J. C. Berendsen. Numerical integration of the Cartesian equations of motion of a system with constraints: molecular dynamics of n-alkanes.Journal of Computational Physics, 23(3):327–341, 1977. doi:10.1016/ 0021-9991(77)90098-5
1977
-
[58]
velocity
Hans C. Andersen. RATTLE: A “velocity” version of the SHAKE algorithm for molecular dynamics calculations.Journal of Computational Physics, 52(1):24–34, 1983. doi:10.1016/ 0021-9991(83)90014-1. 23
1983
-
[59]
Springer, second edition, 2006
Ernst Hairer, Christian Lubich, and Gerhard Wanner.Geometric Numerical Integration: Structure-Preserving Algorithms for Ordinary Differential Equations, volume 31 ofSpringer Series in Computational Mathematics. Springer, second edition, 2006. doi:10.1007/ 3-540-30666-8
2006
-
[60]
Andrew Gelman and Donald B. Rubin. Inference from iterative simulation using multiple sequences.Statistical Science, 7(4):457–472, 1992.doi:10.1214/ss/1177011136
-
[61]
Aki Vehtari, Andrew Gelman, Daniel Simpson, Bob Carpenter, and Paul-Christian B¨ urkner. Rank-normalization, folding, and localization: an improved brfor assessing convergence of MCMC.Bayesian Analysis, 16(2):667–718, 2021.doi:10.1214/20-BA1221
-
[62]
Cook, Andrew Gelman, and Donald B
Samantha R. Cook, Andrew Gelman, and Donald B. Rubin. Validation of software for Bayesian models using posterior quantiles.Journal of Computational and Graphical Statistics, 15(3):675–692, 2006.doi:10.1198/106186006X136976
-
[63]
Martin Modr´ ak, Angie H. Moon, Shinyoung Kim, Paul-Christian B¨ urkner, Niko Huurre, Kateˇ rina Faltejskov´ a, Andrew Gelman, and Aki Vehtari. Simulation-based calibration checking for Bayesian computation: the choice of test quantities shapes sensitivity.Bayesian Analysis, 20(2):461–488, 2025.doi:10.1214/23-BA1404
-
[64]
Marc C. Kennedy and Anthony O’Hagan. Bayesian calibration of computer models.Journal of the Royal Statistical Society: Series B, 63(3):425–464, 2001. doi:10.1111/1467-9868. 00294
-
[65]
Richard D. Wilkinson. Approximate Bayesian computation (ABC) gives exact results under the assumption of model error.Statistical Applications in Genetics and Molecular Biology, 12(2):129–141, 2013.doi:10.1515/sagmb-2013-0010
-
[66]
detcorr: determinant corrections for constrained Bayesian inverse problems
Jonathon Cottom and Emilia Olsson. detcorr: determinant corrections for constrained Bayesian inverse problems. Python package, version 0.10.0, 2026. URL: https://github. com/Olsson-Materials-Modelling/detcorr,doi:10.5281/zenodo.20595686
-
[67]
Daniel Jakubovitz and Raja Giryes
Michael F. Hutchinson. A stochastic estimator of the trace of the influence matrix for Laplacian smoothing splines.Communications in Statistics – Simulation and Computation, 18(3):1059–1076, 1989.doi:10.1080/03610918908812806
-
[68]
Shashanka Ubaru, Jie Chen, and Yousef Saad. Fast estimation of tr(f(A)) via stochastic Lanczos quadrature.SIAM Journal on Matrix Analysis and Applications, 38(4):1075–1099, 2017.doi:10.1137/16M1104974
-
[69]
Meyer, Cameron Musco, Christopher Musco, and David P
Raphael A. Meyer, Cameron Musco, Christopher Musco, and David P. Woodruff. Hutch++: optimal stochastic trace estimation. InProceedings of the 2021 Symposium on Simplicity in Algorithms, pages 142–155. SIAM, 2021.doi:10.1137/1.9781611976496.16. 24
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.