Koopman Modeling and Stabilization of Discrete-Time Nonlinear Control Systems: Bilinearity on a Reproducing Kernel Hilbert Space
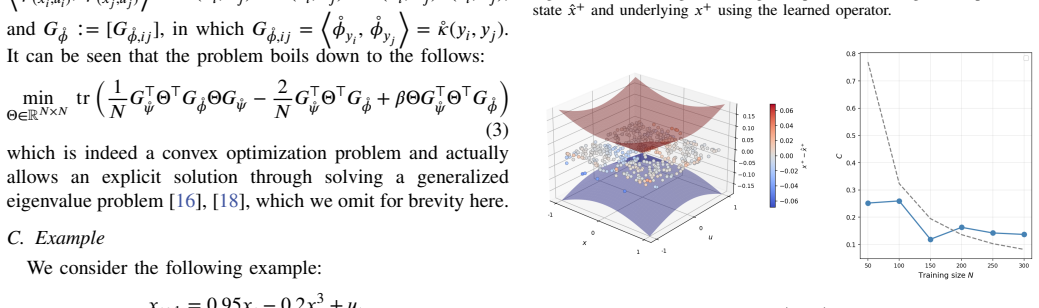
Pith reviewed 2026-06-27 12:40 UTC · model grok-4.3
The pith
Nonlinear discrete-time systems can be exactly modeled as bilinear dynamics by separately lifting states and inputs into reproducing kernel Hilbert spaces.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
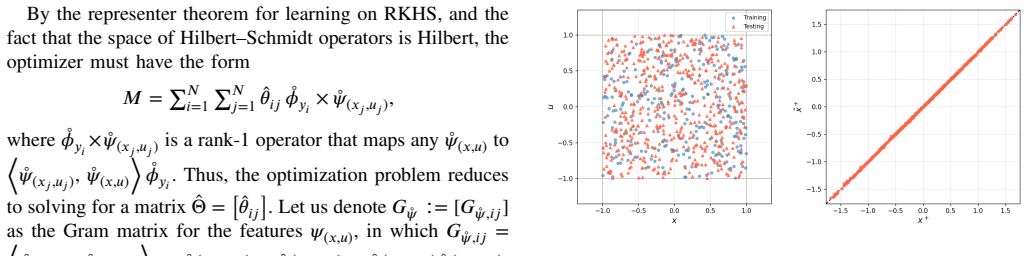
It is proven that nonlinear systems, if satisfying appropriate smoothness and regularity conditions, can be expressed exactly as bilinear dynamics, when the state variables and input variables are separately lifted into their reproducing kernel Hilbert spaces. To account for the knowledge of an equilibrium point at the origin, the RKHS is defined by a linear-radial product kernel, and hence the functions belonging to this RKHS are spanned by the multiplications of component functions and Sobolev functions. The stabilization problem, namely the determination of a feedback law that causes a Lyapunov function (expressed as a kernel sum-of-squares form) to decrease, is then posed as an infinite-
What carries the argument
Bilinear dynamics obtained by separate lifting of state and input variables into RKHSs, which exactly represents the original nonlinear map.
If this is right
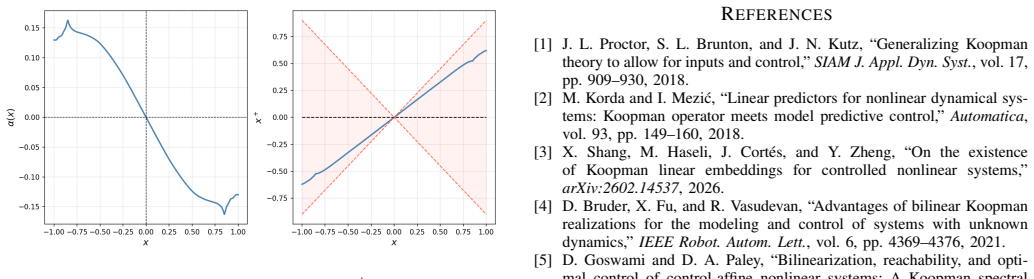
- Stabilization reduces to finding a feedback law that makes a kernel sum-of-squares Lyapunov function decrease along the bilinear lifted dynamics.
- The infinite-dimensional optimization over conditional input measures becomes solvable by the proposed discretization scheme.
- The representation applies directly to discrete-time systems and does not require operator semigroups or infinitesimal generators.
Where Pith is reading between the lines
- The bilinear structure in the lifted space may permit reuse of existing bilinear control synthesis methods once the lifts are obtained.
- Data-driven approximation of the RKHS lifts could extend the method to settings where the system equations are unknown.
- Verification on low-dimensional polynomial or trigonometric nonlinearities would test whether the exactness holds in concrete cases satisfying the smoothness premise.
Load-bearing premise
The nonlinear system satisfies the stated smoothness and regularity conditions that permit an exact bilinear representation in the chosen RKHS.
What would settle it
A smooth nonlinear discrete-time system with inputs that cannot be expressed exactly as bilinear dynamics under any RKHS equipped with the linear-radial product kernel.
Figures
read the original abstract
Despite the popularity of Koopman modeling for nonlinear systems, in the presence of input variables, the evident nonexistence of a fully linear time-invariant model even in infinite dimensions makes Koopman-based control largely an open problem to date. Focusing on discrete-time systems in this paper, which eschews from using operator semigroup and infinitesimal generator notions, it is proven that nonlinear systems, if satisfying appropriate smoothness and regularity conditions, can be expressed exactly as bilinear dynamics, when the state variables and input variables are separately lifted into their reproducing kernel Hilbert spaces (RKHSs). To account for the knowledge of an equilibrium point at the origin, the RKHS is defined by a linear--radial product kernel, and hence the functions belonging to this RKHS are spanned by the multiplications of component functions and Sobolev functions. The stabilization problem, namely the determination of a feedback law that causes a Lyapunov function (expressed as a kernel sum-of-squares form) to decrease, is then posed as an infinite-dimensional optimization problem over state-dependent conditional probability measures over the input space, solved via a discretization scheme.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript claims that discrete-time nonlinear control systems satisfying appropriate smoothness and regularity conditions admit an exact bilinear representation when state and input variables are lifted separately into reproducing kernel Hilbert spaces via a linear-radial product kernel (which encodes the origin equilibrium). The stabilization task is then posed as an infinite-dimensional optimization problem over state-dependent conditional probability measures on the input space and solved by a discretization scheme.
Significance. If the exact bilinear representation holds under the stated conditions, the result would supply a rigorous, non-approximate foundation for Koopman-based control of input-driven nonlinear systems, moving beyond the well-known absence of fully linear infinite-dimensional models. The avoidance of semigroup/generator machinery and the use of kernel sum-of-squares Lyapunov functions are technically distinctive.
major comments (2)
- [Abstract] Abstract: the assertion of an exact bilinear representation under smoothness/regularity conditions is stated without derivation steps, an explicit definition of the linear-radial product kernel, or verification that separate RKHS lifts of state and input indeed produce bilinearity while preserving the claimed exactness.
- [Abstract] Abstract (stabilization paragraph): the discretization scheme for the infinite-dimensional optimization over conditional probability measures is introduced, yet no argument is supplied showing that the scheme preserves the exact bilinear representation or the decrease of the kernel sum-of-squares Lyapunov function.
minor comments (1)
- The spanning property of the RKHS (multiplications of component functions and Sobolev functions) is asserted but would benefit from an explicit formula or reference to the precise kernel definition in the main text.
Simulated Author's Rebuttal
We thank the referee for the careful reading and the constructive comments on the abstract. We agree that the abstract can be strengthened by briefly indicating the location of the kernel definition and the main theorems, while preserving its summary character. We respond to each major comment below.
read point-by-point responses
-
Referee: [Abstract] Abstract: the assertion of an exact bilinear representation under smoothness/regularity conditions is stated without derivation steps, an explicit definition of the linear-radial product kernel, or verification that separate RKHS lifts of state and input indeed produce bilinearity while preserving the claimed exactness.
Authors: The abstract is a concise summary; the linear-radial product kernel is defined explicitly in Section 2.1, the exact bilinear representation is stated as Theorem 3.1, and the verification that separate state and input lifts yield bilinearity (while preserving exactness under the stated smoothness and regularity conditions) is contained in the proof of Theorem 3.1 together with the supporting lemmas in Section 3. We will revise the abstract to include a short parenthetical reference to the kernel and to Theorem 3.1. revision: yes
-
Referee: [Abstract] Abstract (stabilization paragraph): the discretization scheme for the infinite-dimensional optimization over conditional probability measures is introduced, yet no argument is supplied showing that the scheme preserves the exact bilinear representation or the decrease of the kernel sum-of-squares Lyapunov function.
Authors: The discretization scheme appears in Section 4.2. Preservation of the exact bilinear representation under the discretization is established in Proposition 4.3, and the fact that the discretized problem still guarantees decrease of the kernel sum-of-squares Lyapunov function is shown in Theorem 4.5. We will add a brief clause in the abstract directing the reader to these results. revision: yes
Circularity Check
No significant circularity
full rationale
The derivation asserts an exact bilinear representation of discrete-time nonlinear dynamics under explicit smoothness/regularity conditions via separate RKHS lifts of state and input using a linear-radial product kernel chosen to respect the origin equilibrium. This construction rests on standard external RKHS theory rather than any internal quantity defined in terms of the claimed bilinear form itself. The subsequent stabilization is formulated as an infinite-dimensional optimization over conditional measures, solved by discretization, without any fitted parameter being relabeled as a prediction or any self-citation serving as the sole load-bearing justification. No step reduces the target result to its own inputs by construction.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption The nonlinear system satisfies appropriate smoothness and regularity conditions that permit exact lifting into the chosen RKHS.
Reference graph
Works this paper leans on
-
[1]
Generalizing Koopman theory to allow for inputs and control,
J. L. Proctor, S. L. Brunton, and J. N. Kutz, “Generalizing Koopman theory to allow for inputs and control,”SIAM J. Appl. Dyn. Syst., vol. 17, pp. 909–930, 2018
2018
-
[2]
Linear predictors for nonlinear dynamical sys- tems: Koopman operator meets model predictive control,
M. Korda and I. Mezi ´c, “Linear predictors for nonlinear dynamical sys- tems: Koopman operator meets model predictive control,”Automatica, vol. 93, pp. 149–160, 2018
2018
-
[3]
On the exis- tence of koopman linear embeddings for controlled nonlinear systems,
X. Shang, M. Haseli, J. Cort ´es, and Y . Zheng, “On the existence of Koopman linear embeddings for controlled nonlinear systems,” arXiv:2602.14537, 2026
-
[4]
Advantages of bilinear Koopman realizations for the modeling and control of systems with unknown dynamics,
D. Bruder, X. Fu, and R. Vasudevan, “Advantages of bilinear Koopman realizations for the modeling and control of systems with unknown dynamics,”IEEE Robot. Autom. Lett., vol. 6, pp. 4369–4376, 2021
2021
-
[5]
Bilinearization, reachability, and opti- mal control of control-affine nonlinear systems: A Koopman spectral approach,
D. Goswami and D. A. Paley, “Bilinearization, reachability, and opti- mal control of control-affine nonlinear systems: A Koopman spectral approach,”IEEE Trans. Autom. Control, vol. 67, pp. 2715–2728, 2021
2021
-
[6]
B. Hou and M. Raginsky, “A behavioral framework for data-driven modeling of nonlinear systems in vector-valued reproducing kernel Hilbert spaces,”arXiv:2605.07052, 2026
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[7]
P. Bevanda, B. Driessen, L. C. Iacob, R. Toth, S. Sosnowski, and S. Hirche, “Nonparametric control-Koopman operator learning: Flexible and scalable models for prediction and control,”arXiv:2405.07312, 2024
-
[8]
Koopman form of nonlinear systems with inputs,
L. C. Iacob, R. T ´oth, and M. Schoukens, “Koopman form of nonlinear systems with inputs,”Automatica, vol. 162, p. 111525, 2024
2024
-
[9]
Koopman-based feedback design with stability guarantees,
R. Str ¨asser, M. Schaller, K. Worthmann, J. Berberich, and F. Allg ¨ower, “Koopman-based feedback design with stability guarantees,”IEEE Trans. Autom. Control, 2024
2024
-
[10]
𝐿∞-error bounds for approximations of the Koopman operator by kernel extended dynamic mode decomposition,
F. K ¨ohne, F. M. Philipp, M. Schaller, A. Schiela, and K. Worthmann, “𝐿∞-error bounds for approximations of the Koopman operator by kernel extended dynamic mode decomposition,”SIAM J. Appl. Dyn. Syst., vol. 24, pp. 501–529, 2025
2025
-
[11]
Koopman operator for stability analysis: Theory with a linear–radial product reproducing kernel,
W. Tang and X. Ye, “Koopman operator for stability analysis: Theory with a linear–radial product reproducing kernel,” in8th Learn. Dyn. Control Conf. (L4DC), 2026. accepted, arXiv:2511.06063
-
[12]
Dissipativity analysis of nonlinear systems: A linear–radial kernel-based approach,
X. Ye and W. Tang, “Dissipativity analysis of nonlinear systems: A linear–radial kernel-based approach,” in65th IEEE Conf. Decis. Control (CDC), IEEE, 2026. submitted, arXiv:2509.09812
-
[13]
Two roads to koopman op- erator theory for control: Infinite input sequences and operator families,
M. Haseli, I. Mezi ´c, and J. Cort ´es, “Two roads to Koopman operator theory for control: Infinite input sequences and operator families,” arXiv:2510.15166, 2025
-
[14]
Kernel-based optimal control: An infinitesimal generator approach,
P. Bevanda, N. Hoischen, T. Wittmann, J. Br ¨udigam, S. Hirche, and B. Houska, “Kernel-based optimal control: An infinitesimal generator approach,”arXiv:2412.01591, 2024
-
[15]
From Product Hilbert Spaces to the Generalized Koopman Operator and the Nonlinear Fundamental Lemma,
M. Lazar, “From product Hilbert spaces to the generalized Koopman operator and the nonlinear fundamental lemma,”arXiv:2508.07494, 2025
-
[16]
W. Tang, “Koopman–Nemytskii operator: A linear representation of nonlinear controlled systems,”arXiv:2503.18269, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[17]
Eigendecompositions of transfer operators in reproducing kernel Hilbert spaces,
S. Klus, I. Schuster, and K. Muandet, “Eigendecompositions of transfer operators in reproducing kernel Hilbert spaces,”J. Nonlin. Sci., vol. 30, pp. 283–315, 2020
2020
-
[18]
Learning dynamical systems via Koopman operator regression in reproducing kernel Hilbert spaces,
V . Kostic, P. Novelli, A. Maurer, C. Ciliberto, L. Rosasco, and M. Pontil, “Learning dynamical systems via Koopman operator regression in reproducing kernel Hilbert spaces,”NeurIPS, pp. 4017–4031, 2022
2022
-
[19]
Koopman kernel regression,
P. Bevanda, M. Beier, A. Lederer, S. Sosnowski, E. H ¨ullermeier, and S. Hirche, “Koopman kernel regression,”NeurIPS, pp. 16207–16221, 2023
2023
-
[20]
Nonparametric Sparse Online Learning of the Koopman Operator
B. Hou, S. Sanjari, N. Dahlin, A. Koppel, and S. Bose, “Nonparametric sparse online learning of the Koopman operator,”arXiv:2405.07432, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[21]
Kernel-based Koopman approximants for control: Flexible sampling, error analysis, and stability,
L. Bold, F. M. Philipp, M. Schaller, and K. Worthmann, “Kernel-based Koopman approximants for control: Flexible sampling, error analysis, and stability,”SIAM J. Control Optim., vol. 63, pp. 4044–4071, 2025
2025
-
[22]
Wendland,Scattered data approximation
H. Wendland,Scattered data approximation. Cambridge University Press, 2004
2004
-
[23]
Non-parametric models for non-negative functions,
U. Marteau-Ferey, F. Bach, and A. Rudi, “Non-parametric models for non-negative functions,”Adv. Neur. Inform. Process. Syst., vol. 33, pp. 12816–12826, 2020
2020
-
[24]
Finding global minima via kernel approximations,
A. Rudi, U. Marteau-Ferey, and F. Bach, “Finding global minima via kernel approximations,”Math. Prog., vol. 209, pp. 703–784, 2025
2025
-
[25]
Convex operator-theoretic methods in stochastic control,
B. Houska, “Convex operator-theoretic methods in stochastic control,” Automatica, vol. 177, p. 112274, 2025
2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.