From Ad Hoc Pilots to Repeatable Patterns: Structuring Drone Collaboration in Emergency Services with DroneLets
Pith reviewed 2026-06-27 01:10 UTC · model grok-4.3
The pith
Emergency drone use shifts from ad hoc pilots to modular repeatable patterns via DroneLets.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Based on four field trials and 95 interviews, 44 interaction patterns grouped into 10 meta-patterns are derived to reflect operational needs such as reconnaissance, communication, and logistical support. DroneLets are introduced as modular design artifacts that capture setup requirements, drone capabilities, environmental constraints, and coordinated actions across human and drone actors, providing a framework for repeatable collaboration processes illustrated by examples like broadcasting to bystanders and post-fire monitoring.
What carries the argument
DroneLets, modular design artifacts that extend Collaboration Engineering to embodied agents by encoding requirements and coordinated actions for repeatable human-drone processes.
If this is right
- Emergency services can replace case-by-case drone coordination with reusable patterns for common tasks.
- DroneLets supply a shared language for specifying setup, capabilities, and joint actions between humans and drones.
- Collaboration engineering methods now apply directly to embodied agents in high-stakes field settings.
- Patterns such as bystander broadcasting and post-incident monitoring become design templates rather than one-off improvisations.
Where Pith is reading between the lines
- The same modular approach could extend to other embodied agents such as ground robots in search-and-rescue.
- Additional trials across different regions and drone models would be needed to confirm the patterns hold beyond the original four sites.
- Automated systems could eventually generate or adapt DroneLets on the fly from real-time sensor data.
Load-bearing premise
The 44 patterns and 10 meta-patterns drawn from four field trials and 95 interviews are representative enough to support repeatable processes across varied emergency services and drone platforms.
What would settle it
Testing whether emergency response teams applying the DroneLets framework in new incidents produce measurably fewer ad hoc coordination steps and more consistent outcomes than teams without the framework.
Figures
read the original abstract
Drones hold promise for supporting emergency services, but their integration into workflows remains ad hoc and coordination-intensive. This paper addresses two research questions: how emergency teams want to collaborate with drones, and how to formalize these collaborations into repeatable processes. Based on four field trials and 95 interviews, we derive 44 interaction patterns grouped into 10 meta-patterns reflecting operational needs such as reconnaissance, communication, and logistical support. To structure these practices, we introduce DroneLets - a new class of design artifacts that extend Collaboration Engineering to embodied agents. DroneLets capture setup requirements, drone capabilities, environmental constraints, and coordinated actions across human and drone actors. They offer a modular framework for designing repeatable, scalable collaboration processes in emergency services, illustrated through patterns such as broadcasting to bystanders and post-fire monitoring. This work expands the scope of CE and provides a structured foundation for integrating autonomous drones into high-stakes field operations.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims that analysis of four field trials and 95 interviews with emergency services yields 44 interaction patterns grouped into 10 meta-patterns; it introduces DroneLets as a new class of modular design artifacts extending Collaboration Engineering to embodied drone agents, capturing setup, capabilities, constraints, and coordinated actions to enable repeatable, scalable drone-human collaboration processes in emergencies, with examples such as bystander broadcasting and post-fire monitoring.
Significance. If the derivation and generalizability hold, the work would provide a concrete, extensible framework for moving drone use in emergency response from ad-hoc to structured processes, expanding Collaboration Engineering to embodied agents and offering practical guidance for high-stakes field operations.
major comments (2)
- [Data analysis / results] The section describing data analysis (abstract and results): no details are given on the qualitative coding process, inter-rater reliability, saturation criteria, or external validation steps used to extract the 44 patterns and 10 meta-patterns from the raw field observations and interviews. This directly affects the reliability of the central claim that these patterns constitute a foundation for repeatable processes.
- [Methods / results] The description of the four field trials (methods/results): specific contexts, incident types, drone platforms, and team compositions are not shown to be diverse, so the step from these instances to a generalizable modular framework usable 'across varied emergency services and drone platforms' remains unsupported.
Simulated Author's Rebuttal
We thank the referee for the constructive comments, which identify key areas where additional methodological transparency will strengthen the paper. We address each major comment below and will revise the manuscript to provide the requested details.
read point-by-point responses
-
Referee: [Data analysis / results] The section describing data analysis (abstract and results): no details are given on the qualitative coding process, inter-rater reliability, saturation criteria, or external validation steps used to extract the 44 patterns and 10 meta-patterns from the raw field observations and interviews. This directly affects the reliability of the central claim that these patterns constitute a foundation for repeatable processes.
Authors: We agree that the manuscript would benefit from greater detail on the qualitative analysis. In the revised version we will insert a dedicated 'Data Analysis' subsection in Methods that explicitly describes the coding process used to derive the 44 patterns and 10 meta-patterns, reports inter-rater reliability (e.g., Cohen's kappa or percentage agreement between independent coders), states the saturation criteria applied, and notes any external validation or member-checking steps conducted with emergency-services participants. revision: yes
-
Referee: [Methods / results] The description of the four field trials (methods/results): specific contexts, incident types, drone platforms, and team compositions are not shown to be diverse, so the step from these instances to a generalizable modular framework usable 'across varied emergency services and drone platforms' remains unsupported.
Authors: We accept that the current description of the field trials is insufficient to demonstrate diversity. We will expand the 'Field Trials' subsection to include, for each of the four trials, the specific operational context, incident type, drone platform(s) employed, and team composition (roles and numbers of personnel). These additions will allow readers to assess the range of settings and will provide concrete support for the framework's intended applicability across varied emergency services and platforms. revision: yes
Circularity Check
No circularity: patterns derived inductively from field data
full rationale
The paper's derivation consists of extracting 44 interaction patterns and 10 meta-patterns from four field trials plus 95 interviews, then introducing DroneLets as an extension of Collaboration Engineering to embodied agents. No equations, fitted parameters, self-definitional loops, or load-bearing self-citations are present that would reduce any claimed result to its own inputs by construction. The central claims rest on empirical observation rather than renaming, fitting, or importing uniqueness from prior author work, rendering the chain self-contained.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Collaboration Engineering principles can be directly extended from software-mediated collaboration to physical embodied agents such as drones.
invented entities (1)
-
DroneLets
no independent evidence
Reference graph
Works this paper leans on
-
[1]
This paper addresses two research questions: how emergency teams want to collaborate with drones, and how to formalize these collaborations into repeatable processes
From Ad Hoc Pilots to Repeatable Patterns Forty-Sixth International Conference on Information Systems, Nashville, Tennessee, USA 2025 1 From Ad Hoc Pilots to Repeatable Patterns: Structuring Drone Collaboration in Emer-gency Services with DroneLets Completed Research Paper Dzmitry Katsiuba University of Zurich Zurich, Switzerland katsiuba@ifi.uzh.ch Samue...
2025
-
[2]
From Ad Hoc Pilots to Repeatable Patterns Forty-Sixth International Conference on Information Systems, Nashville, Tennessee, USA 2025 2 The successful integration of autonomous drones into ES hinges on both technological advancements and the development of suitable organizational structures and collaborative processes. While technological au-tonomy – the ...
2025
-
[3]
From Ad Hoc Pilots to Repeatable Patterns Forty-Sixth International Conference on Information Systems, Nashville, Tennessee, USA 2025 3 a fully scripted, executable collaborative procedure for human-drone teams that delivers predictable out-comes when applied across contexts (e.g., in search and rescue, during firefighting, and after a shooting). While th...
2025
-
[4]
and documenting crime scenes from the air (Urbanová et al., 2017). In firefighting, drones can provide aerial perspectives of large fires (Wankmüller et al., 2021), access high-rise buildings or remote forest areas, and assist in identifying hotspots using thermal imaging and even three-dimensional modeling and damage assessment (Zweglinski, 2020). Numero...
2017
-
[5]
and provide a stable basis for reference, even in non-standard situations (Carvalho et al., 2018; Jahn, Authors’ copy accepted at ICIS
2018
-
[6]
From Ad Hoc Pilots to Repeatable Patterns Forty-Sixth International Conference on Information Systems, Nashville, Tennessee, USA 2025 4 2016). Accordingly, training often focuses on internalizing these procedures, enabling responders to react instinctively and correctly during emergencies (Toups Dugas & Kerne, 2007; Weinschenk et al., 2008). SOPs are freq...
2025
-
[7]
gathering information
From Ad Hoc Pilots to Repeatable Patterns Forty-Sixth International Conference on Information Systems, Nashville, Tennessee, USA 2025 5 questions regarding autonomy levels, interaction timing, spatial awareness, and shared control, none of which are addressed by existing CE constructs. While AI-ThinkLets demonstrate that collaboration processes can be str...
2025
-
[8]
From Ad Hoc Pilots to Repeatable Patterns Forty-Sixth International Conference on Information Systems, Nashville, Tennessee, USA 2025 6 knowledge of both the empirical data and collaboration theory was deliberate, ensuring that the resulting Meta-Patterns were not only reflective of the practitioner insights but also robust enough to serve as the foundati...
2025
-
[9]
We derived a structured catalogue that provides a comprehensive overview of how autonomous drones can augment human emergency response activities
From Ad Hoc Pilots to Repeatable Patterns Forty-Sixth International Conference on Information Systems, Nashville, Tennessee, USA 2025 7 scenario, a drone communicates with the human actors on the ground, providing guidance or it supports the operation with illumination. We derived a structured catalogue that provides a comprehensive overview of how autono...
2025
-
[10]
From Ad Hoc Pilots to Repeatable Patterns Forty-Sixth International Conference on Information Systems, Nashville, Tennessee, USA 2025 8 Geospatial Intel-ligence Support Drones enhance situa-tional awareness by marking mission-rele-vant features and veri-fying address loca-tions. - Annotating environmental features or findings on a digital map - Verifying ...
2025
-
[11]
From Ad Hoc Pilots to Repeatable Patterns Forty-Sixth International Conference on Information Systems, Nashville, Tennessee, USA 2025 9 With SkyMessenger, the drone supports the emergency service team by transmitting the message to the persons in the defined area. Choose this pattern… … when you need to transmit a message to victims or bystanders … when v...
2025
-
[12]
From Ad Hoc Pilots to Repeatable Patterns Forty-Sixth International Conference on Information Systems, Nashville, Tennessee, USA 2025 10 Script Drone
2025
-
[13]
From Ad Hoc Pilots to Repeatable Patterns Forty-Sixth International Conference on Information Systems, Nashville, Tennessee, USA 2025 11 Current approaches to deploying drones often rely on ad hoc setups, trial-and-error practices, or implicit knowledge held by experienced operators. In many emergency service organizations, drone use is either outsourced ...
2025
-
[14]
The DroneLet represents the next evolution in this lin-eage, expanding the ThinkLet family to accommodate the complexity of human-drone collaboration
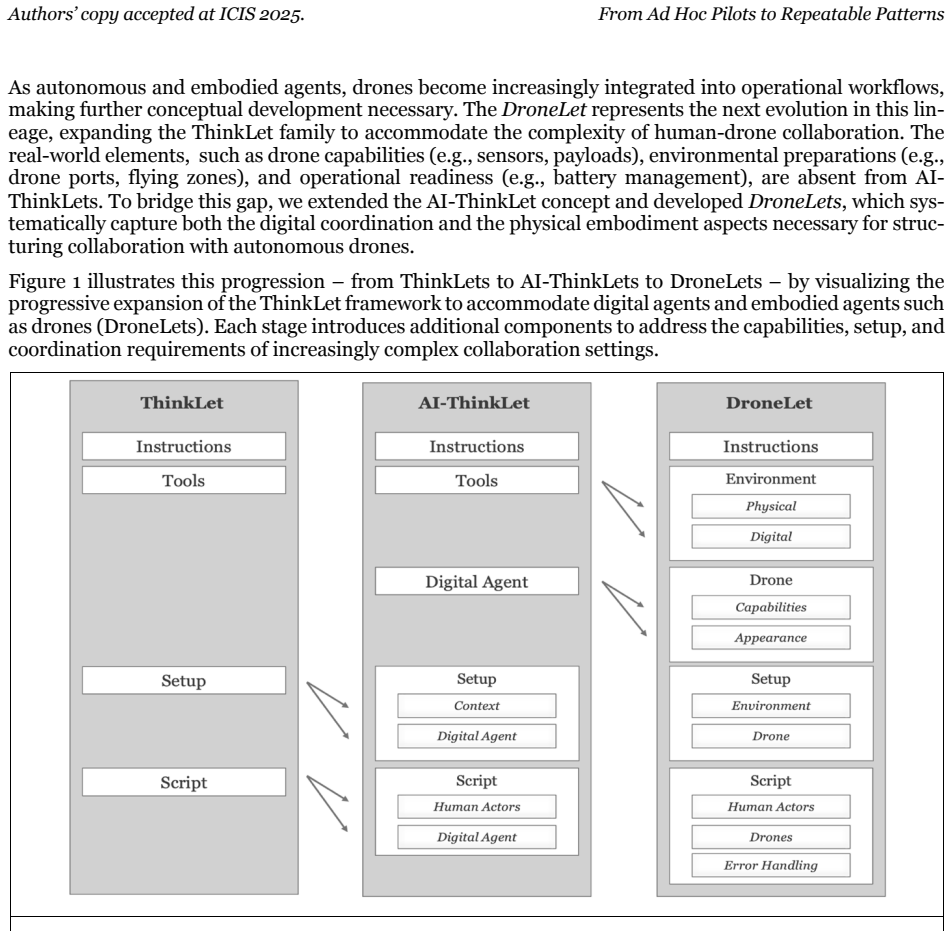
From Ad Hoc Pilots to Repeatable Patterns Forty-Sixth International Conference on Information Systems, Nashville, Tennessee, USA 2025 12 As autonomous and embodied agents, drones become increasingly integrated into operational workflows, making further conceptual development necessary. The DroneLet represents the next evolution in this lin-eage, expanding...
2025
-
[15]
Evolution of Collaboration Design Constructs: From ThinkLets to AI-ThinkLets to DroneLets (based on Schwabe et al. (2025)) The DroneLet expands the traditional ThinkLet structure by eight new components, each reflecting a criti-cal aspect of collaboration with autonomous, embodied agents: Instructions, as in ThinkLet, define when the DroneLet should (or s...
2025
-
[16]
It covers both the drone’s functional capabilities and its appearance, which may influence user trust, recognizability, or social acceptance
From Ad Hoc Pilots to Repeatable Patterns Forty-Sixth International Conference on Information Systems, Nashville, Tennessee, USA 2025 13 The Drone components specify the technical and perceptual properties of the drone that are required for the pattern. It covers both the drone’s functional capabilities and its appearance, which may influence user trust, ...
2025
-
[17]
It requires drones to be equipped with the combined functionalities of multiple collab-oration patterns, and the environment must support these extended operational phases
From Ad Hoc Pilots to Repeatable Patterns Forty-Sixth International Conference on Information Systems, Nashville, Tennessee, USA 2025 14 However, sequential execution increases the demands on drone capabilities, environment setup, and coor-dination processes. It requires drones to be equipped with the combined functionalities of multiple collab-oration pa...
2025
-
[18]
The se-lection, refinement, and abstraction of collaboration patterns were based on interview analysis rather than practitioner co-design
From Ad Hoc Pilots to Repeatable Patterns Forty-Sixth International Conference on Information Systems, Nashville, Tennessee, USA 2025 15 Second, while the interaction patterns and DroneLets were grounded in rich empirical data, they were not directly validated with police officers, firefighters, or field practitioners during the design process. The se-lec...
2025
-
[19]
https://doi.org/10.3390/drones3010017 Boonyard, C., Jouffrais, C., Cauchard, J. R., & Brock, A. M. (2025). Firefighting with Drone Assistance: User Needs and Design Considerations for Thailand. Proceedings of the 2025 CHI Conference on Human Factors in Computing Systems, 1–18. https://doi.org/10.1145/3706598.3714172 Briggs, R. O., & De Vreede, G.-J. (2009...
-
[20]
O., Kolfschoten, G., De Vreede, G.-J
From Ad Hoc Pilots to Repeatable Patterns Forty-Sixth International Conference on Information Systems, Nashville, Tennessee, USA 2025 16 Briggs, R. O., Kolfschoten, G., De Vreede, G.-J. de, Albrecht, C., Dean, D. R., & Lukosch, S. (2009). A seven-layer model of collaboration: Separation of concerns for designers of collaboration systems. ICIS 2009 Proceedings,
2025
-
[21]
Butler, P. C., Bowers, A., Smith, A. P., Cohen-Hatton, S. R., & Honey, R. C. (2023). Decision Making Within and Outside Standard Operating Procedures: Paradoxical Use of Operational Discretion in Firefighters. Human Factors, 65(7), 1422–1434. https://doi.org/10.1177/00187208211041860 Carvalho, P. V. R. de, Righi, A. W., Huber, G. J., Lemos, C. de F., Jato...
-
[22]
Li, M., Katsiuba, D., Dolata, M., & Schwabe, G. (2024). Firefighters’ Perceptions on Collaboration and In-teraction with Autonomous Drones: Results of a Field Trial. Proceedings of the CHI. Conference on Human Factors in Computing Systems (CHI ’24), Honolulu HI USA. Mayer, S., Lischke, L., & Woźniak, P. W. (2019, May). Drones for Search and Rescue. 1st In...
2024
-
[23]
https://doi.org/10.1007/s42452-019-1322-6 Authors’ copy accepted at ICIS
-
[24]
From Ad Hoc Pilots to Repeatable Patterns Forty-Sixth International Conference on Information Systems, Nashville, Tennessee, USA 2025 17 Standard Operating Procedures (SOP). (2025, May 1). Russellville, AR - Official Website. https://www.russellvillearkansas.org/621/Standard-Operating-Procedures-SOP Toups Dugas, P. O., & Kerne, A. (2007). Implicit coordin...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.