Tactile Genesis: Exploring Tactile Sensors at Scale for Learning Dexterous Tasks
Pith reviewed 2026-06-26 10:38 UTC · model grok-4.3
The pith
Sensor placement on the hand matters more than sensor type for dexterous manipulation policies.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
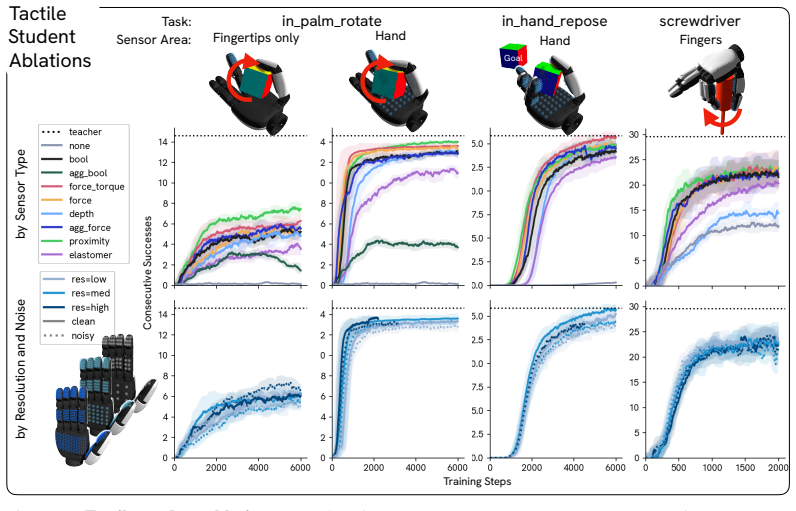
Using Tactile Genesis to ablate sensor type, placement, resolution, and noise, the authors establish that whole-hand coverage with per-taxel force/torque sensing lets student policies approach privileged-teacher performance on dexterous tasks, fingertip-only coverage trails by a wide margin, adding palm and proximal phalanges closes most of the gap, 200 taxels suffice when spread across the hand, and proprioception alone is insufficient on every task.
What carries the argument
Tactile Genesis, a GPU-parallel simulation platform exposing multiple tactile modalities under one interface with configurable placement, resolution, and noise models to enable large-scale ablation studies.
If this is right
- Whole-hand coverage with palm and proximal phalanges closes most of the gap to the privileged teacher.
- Force/torque per taxel is the single most useful sensor type across all three tasks.
- Resolution matters less than coverage, and 200 taxels distributed over the hand suffice.
- Proprioception alone produces failure on every task tested.
Where Pith is reading between the lines
- Hardware builders could reduce cost by spreading moderate-density sensors rather than concentrating high-resolution arrays on the fingertips.
- Policy observation spaces might be pruned to keep only force/torque channels from well-placed taxels without much loss.
- The same simulator could test whether audio or temperature fields become useful on tasks with longer contact durations.
Load-bearing premise
The simulated physics and noise model match real tactile sensor behavior closely enough that relative rankings of placements and types transfer to physical robots.
What would settle it
A real-robot experiment showing that a hand with only fingertip force/torque sensors matches the success rate of a whole-hand version on the same tasks would falsify the placement-dominance result.
Figures

read the original abstract
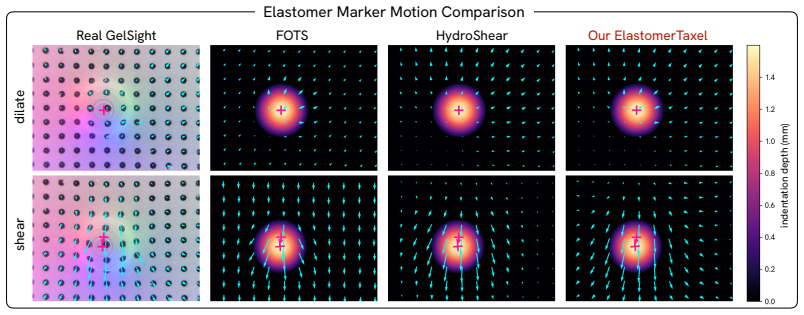
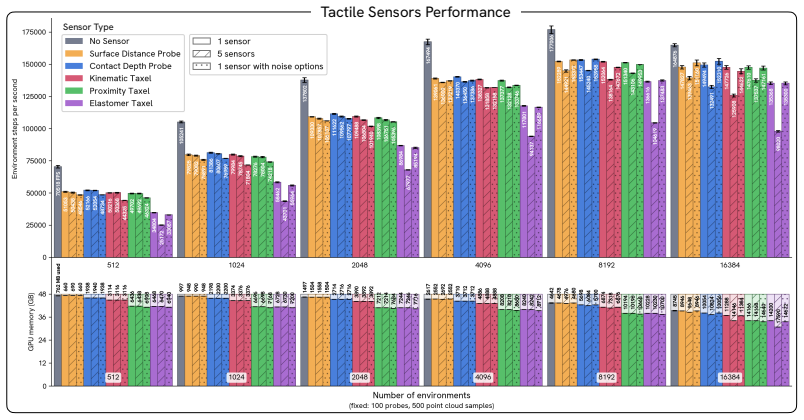
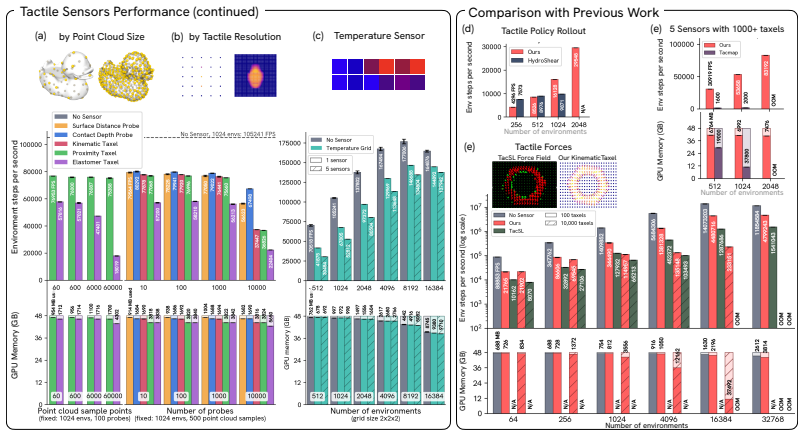
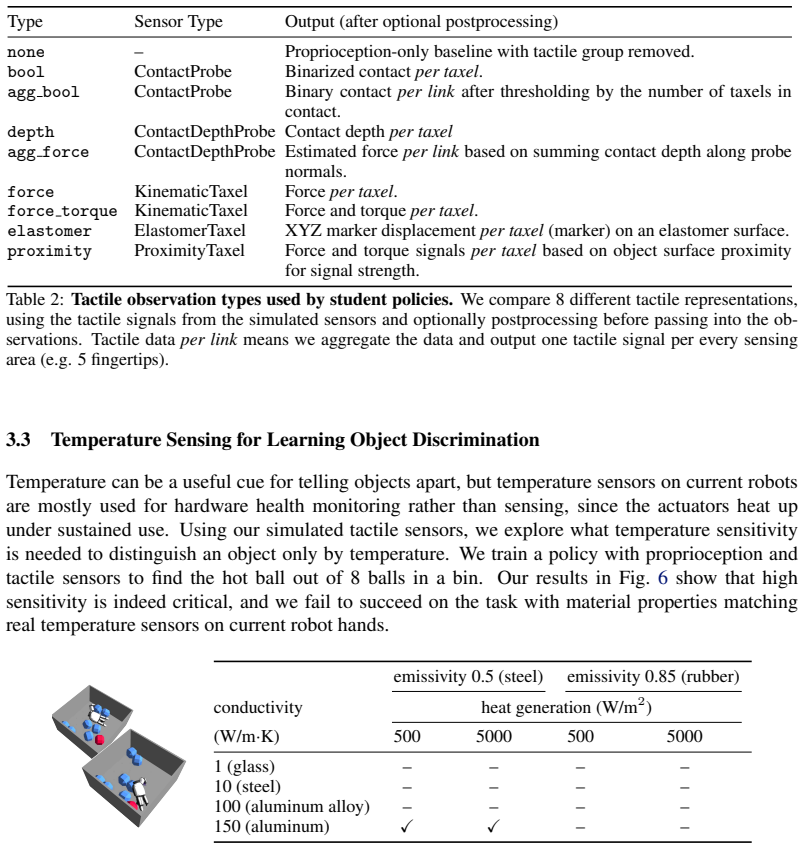
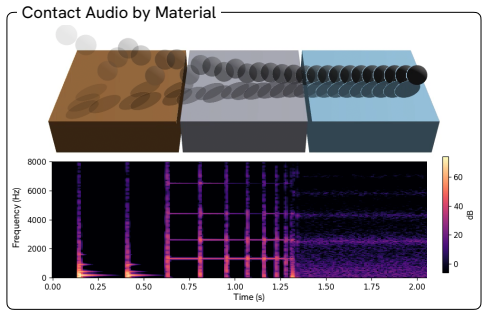
Tactile sensing is critical for contact-rich dexterous manipulation, yet it remains unclear which tactile abstractions a policy needs and when richer tactile fields justify their hardware cost. This is hard to study empirically: each sensor effectively defines a new robot, and no lab can replicate the same learning experiment across all of them. We present Tactile Genesis, a GPU-parallel tactile sensor simulation platform that exposes binary contact, contact depth, per-taxel kinematic force/torque, elastomer marker displacement, geometry-aware proximity, contact audio, and a voxelized temperature field (the first of its kind in robot learning physics simulation platforms) under a common interface, with configurable placement, resolution, and a realistic noise model (drift, hysteresis, dead taxels, crosstalk). It scales past 20,000 parallel environments and 1,000 taxels on a single GPU, improving throughput by 3 to 20 times over previous tactile simulators. We train teacher-student policies on three dexterous tasks, ablating sensor type, placement, resolution, and noise, and verify transfer to the real XHand1. Proprioception alone is insufficient on every task. Sensor placement dominates sensor type: fingertip-only coverage trails whole-hand coverage by a wide margin, while adding the palm and proximal phalanges closes most of the gap to the privileged teacher. Resolution matters far less than coverage: placing 200 taxels across the whole hand suffices across tasks. We find that force/torque per taxel is consistently the most useful sensor type. These results give concrete guidance for both future tactile hardware design for improving robot hands and policy-side observation choice in dexterous manipulation. https://neuroagents-lab.github.io/2026-tactile-genesis/
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
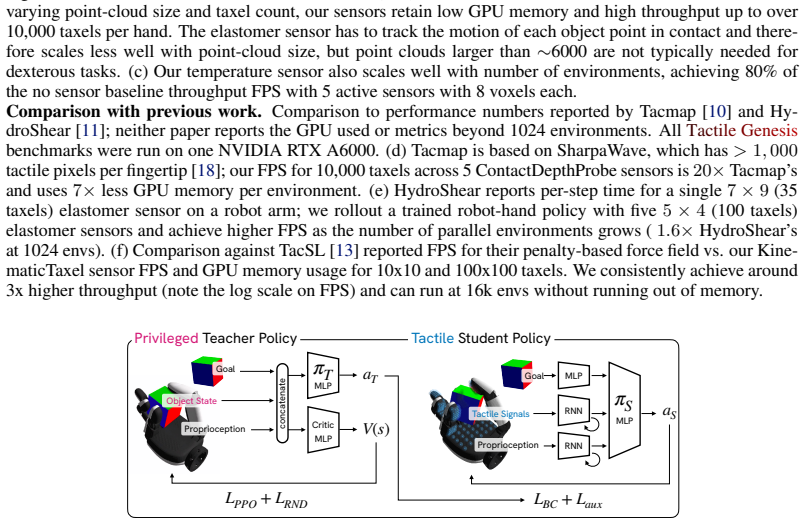
Summary. The paper introduces Tactile Genesis, a scalable GPU-parallel simulation platform for multiple tactile sensor abstractions (binary contact, contact depth, per-taxel force/torque, marker displacement, proximity, audio, and voxelized temperature) with configurable placement, resolution, and a noise model including drift, hysteresis, dead taxels, and crosstalk. It trains teacher-student policies on three dexterous tasks, ablating sensor type, placement, resolution, and noise, and reports that placement dominates type (fingertip-only trails whole-hand coverage), force/torque per taxel is most useful, proprioception alone is insufficient, resolution matters less than coverage (200 taxels suffice), and policies transfer to the real XHand1.
Significance. If the ablation rankings hold under real sensor physics, the results supply concrete, actionable guidance for tactile hardware design on robot hands and for observation selection in dexterous manipulation policies. The platform's throughput (3-20x prior simulators, >20k parallel environments, >1k taxels on one GPU) and support for a novel temperature field are enabling strengths for large-scale empirical studies that were previously impractical.
major comments (1)
- [Abstract] Abstract: the claim that 'we ... verify transfer to the real XHand1' is invoked to support the headline ordering (placement dominates type; force/torque per taxel best), yet the transfer experiments are described only for a subset of the ablated configurations. Without evidence that the relative usefulness ranking remains stable when real sensor physics (drift, hysteresis, crosstalk) replace the simulated noise model, the dominance conclusions rest on unvalidated simulation assumptions.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback and the opportunity to address the scope of our real-world experiments. We respond to the major comment below.
read point-by-point responses
-
Referee: [Abstract] Abstract: the claim that 'we ... verify transfer to the real XHand1' is invoked to support the headline ordering (placement dominates type; force/torque per taxel best), yet the transfer experiments are described only for a subset of the ablated configurations. Without evidence that the relative usefulness ranking remains stable when real sensor physics (drift, hysteresis, crosstalk) replace the simulated noise model, the dominance conclusions rest on unvalidated simulation assumptions.
Authors: We acknowledge that the transfer experiments were performed only on a subset of configurations (the highest-performing ones identified via simulation ablations) rather than exhaustively across all variants. The abstract phrasing does invoke the real-world transfer to lend support to the overall ordering, which could be read as overstating the direct validation of every ranking. The simulation noise model incorporates drift, hysteresis, dead taxels, and crosstalk, calibrated against real sensor data, and the successful transfer of the recommended whole-hand force/torque setup provides evidence that the sim-to-real gap is bridgeable for those configurations. However, exhaustive real-robot ablations for every sensor type, placement, and resolution combination are impractical given hardware and time constraints—the core motivation for developing the simulator. We will revise the abstract to state that transfer was verified for selected top configurations and add a limitations paragraph discussing the assumptions underlying the simulation-based rankings. revision: partial
Circularity Check
No circularity: empirical ablation results are independent of inputs
full rationale
The paper's central claims (placement dominates type; force/torque per taxel most useful; proprioception insufficient) are obtained from direct simulation ablations across sensor configurations, followed by teacher-student policy training and reported transfer to real hardware. No equations, fitted parameters, or self-citations are shown to reduce any result to its own definition or prior output by construction. The work is self-contained against external benchmarks via the described GPU-parallel experiments.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Y . Song, J. Wang, Z. Li, W. Hu, Y . Qiu, Y . Tian, P. Zhao, A. Liu, and H. Wu. Fingertip- scale six-axis tactile interface with high-precision force sensing and position localization for dexterous human–machine interactions.Microsystems & Nanoengineering, 12(1):193, 2026
2026
-
[2]
R. Bhirangi, T. Hellebrekers, C. Majidi, and A. Gupta. ReSkin: Versatile, replaceable, lasting tactile skins. InProceedings of the Conference on Robot Learning, November 2021. URL https://arxiv.org/abs/2111.00071
arXiv 2021
-
[3]
W. Yuan, S. Dong, and E. H. Adelson. GelSight: High-resolution robot tactile sensors for estimating geometry and force.Sensors, 17(12):2762, 2017. doi:10.3390/s17122762
-
[4]
Z. Xu, Z. Si, K. Zhang, O. Kroemer, and Z. Temel. A multi-modal tactile fingertip design for robotic hands to enhance dexterous manipulation, 2025. URLhttps://arxiv.org/abs/ 2510.05382
arXiv 2025
-
[5]
Mejia, V
J. Mejia, V . Dean, T. Hellebrekers, and A. Gupta. Hearing touch: Audio-visual pretraining for contact-rich manipulation. In2024 IEEE International Conference on Robotics and Automa- tion (ICRA), pages 6912–6919. IEEE, 2024
2024
- [6]
-
[7]
D. Kitouni, E. Chelly, M. Khoramshahi, and V . Perdereau. Fingertip contact force direction control using tactile feedback, 2024. URLhttp://arxiv.org/abs/2406.11545
arXiv 2024
-
[8]
C. Higuera, A. Sharma, T. Fan, C. K. Bodduluri, B. Boots, M. Kaess, M. Lambeta, T. Wu, Z. Liu, F. R. Hogan, and M. Mukadam. Tactile beyond pixels: Multisensory touch representa- tions for robot manipulation, 2025. URLhttp://arxiv.org/abs/2506.14754
arXiv 2025
-
[9]
Y . Zhao, K. Qian, B. Duan, and S. Luo. FOTS: A fast optical tactile simulator for sim2real learning of tactile-motor robot manipulation skills, 2024. URLhttp://arxiv.org/abs/ 2404.19217
arXiv 2024
-
[10]
L. Su, Z. Peng, R. Ren, S. Mao, J. Du, K. Zhang, and X. Zhu. Tacmap: Bridging the tactile sim-to-real gap via geometry-consistent penetration depth map, 2026. URLhttp://arxiv. org/abs/2602.21625
Pith/arXiv arXiv 2026
-
[11]
A. Dang, J. Lee, M. Mukadam, X. A. Wu, B. Bucher, M. Nambi, and N. Fazeli. HydroS- hear: Hydroelastic shear simulation for tactile sim-to-real reinforcement learning, 2026. URL https://arxiv.org/abs/2603.00446
arXiv 2026
-
[12]
Y . Li, W. Du, C. Yu, P. Li, Z. Zhao, T. Liu, C. Jiang, Y . Zhu, and S. Huang. Taccel: Scaling up vision-based tactile robotics via high-performance gpu simulation, 2025. URLhttp:// arxiv.org/abs/2504.12908
arXiv 2025
-
[13]
Akinola, J
I. Akinola, J. Xu, J. Carius, D. Fox, and Y . Narang. Tacsl: A library for visuotactile sensor simulation and learning.IEEE Transactions on Robotics, 2025
2025
-
[14]
Si and W
Z. Si and W. Yuan. Taxim: An example-based simulation model for gelsight tactile sensors. IEEE Robotics and Automation Letters, 7(2):2361–2368, 2022
2022
-
[15]
J. Yin, H. Qi, J. Malik, J. Pikul, M. Yim, and T. Hellebrekers. Learning in-hand translation us- ing tactile skin with shear and normal force sensing. In2025 IEEE International Conference on Robotics and Automation, pages 5850–5856, 2025. doi:10.1109/ICRA55743.2025.11127974
-
[16]
Miller, T
E. Miller, T. McInroe, D. Abel, O. Mac Aodha, and S. Vijayakumar. Enhancing tactile- based reinforcement learning for robotic control. InOpenReview, 2025. URLhttps: //openreview.net/forum?id=Toy96yYopR. 10
2025
-
[17]
Z. Liu, C. Chi, E. Cousineau, N. Kuppuswamy, B. Burchfiel, and S. Song. Maniwav: Learning robot manipulation from in-the-wild audio-visual data. InConference on Robot Learning, pages 947–962. PMLR, 2025
2025
-
[18]
URLhttps://www.sharpa.com/blogs/news/ sharpa-unveils-its-first-autonomous-full-body-robot-with-human-dexterity-at-ces-2026
Jan 2026. URLhttps://www.sharpa.com/blogs/news/ sharpa-unveils-its-first-autonomous-full-body-robot-with-human-dexterity-at-ces-2026
2026
-
[19]
G. A. Team. The role of simulation in scalable robotics, genesis world 1.0, and the path forward.Genesis AI Blog, May 2026. URLhttps://www.genesis.ai/blog/ the-role-of-simulation-in-scalable-robotics-genesis-world-10-and-the-path-forward
2026
-
[20]
Burda, H
Y . Burda, H. Edwards, A. Storkey, and O. Klimov. Exploration by random network distillation,
-
[21]
URLhttps://arxiv.org/abs/1810.12894
-
[22]
Schwarke, V
C. Schwarke, V . Klemm, M. v. d. Boon, M. van der Bjelonic, and M. Hutter. Curiosity-driven learning of joint locomotion and manipulation tasks. InProceedings of the 7th Conference on Robot Learning, pages 2594–2610, 2023. URLhttps://proceedings.mlr.press/v229/ schwarke23a.html
2023
-
[23]
rel. thr
S. Ross, G. Gordon, and D. Bagnell. A reduction of imitation learning and structured prediction to no-regret online learning. In G. Gordon, D. Dunson, and M. Dud ´ık, editors,Proceedings of the Fourteenth International Conference on Artificial Intelligence and Statistics, volume 15 ofProceedings of Machine Learning Research, pages 627–635, Fort Lauderdale...
2011
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.