DISPCA : A hybrid iterative-sequential approach for the identification of errors-in-variables model of linear DAE systems
Pith reviewed 2026-06-26 06:49 UTC · model grok-4.3
The pith
A hybrid algorithm identifies the full structure and parameters of linear DAE systems directly from noisy input-output measurements.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
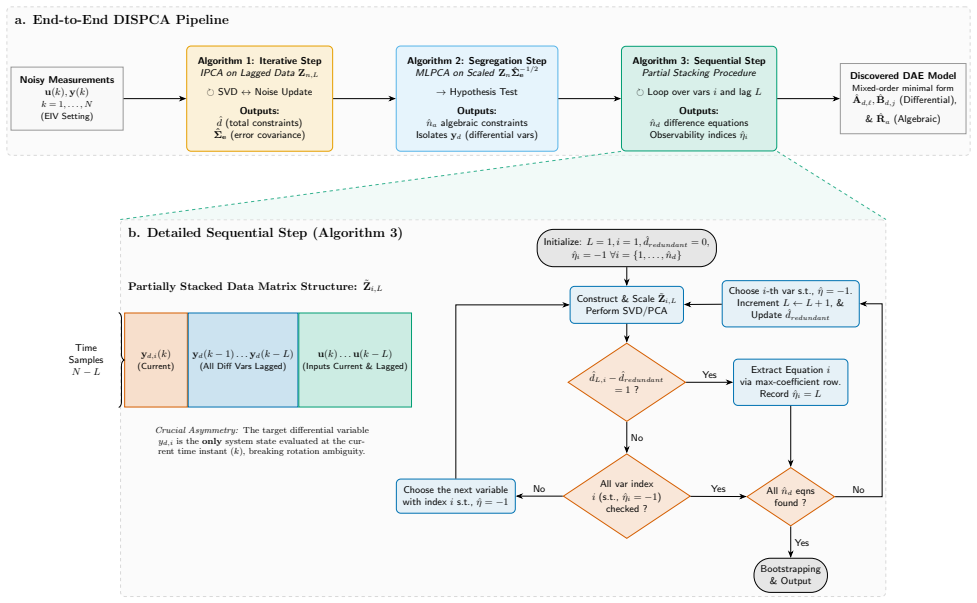
The DISPCA algorithm, through iterative estimation of a diagonal heteroskedastic measurement error covariance matrix under large-sample conditions followed by a sequential partial stacking procedure on lagged data matrices with increasing lag windows, identifies all differential relations individually and thereby estimates the number of differential and algebraic relations, observability indices, delay parameters of the differential equations, and all model coefficients directly from measured data in an errors-in-variables setting for linear DAE systems that may contain multiple algebraic and differently ordered differential relations.
What carries the argument
The partial stacking procedure of the lagged data matrix with a sequentially increasing lag window that isolates each differential relation individually, after an iterative estimation of the diagonal heteroskedastic measurement error covariance matrix.
If this is right
- The method works for systems containing multiple algebraic relations and differential relations of different orders.
- It decomposes the identification problem to maintain computational tractability despite increased complexity from coupled dynamic interactions.
- All structural elements and coefficients are obtained simultaneously without requiring the user to specify any of them in advance.
- Effectiveness is shown through simulation studies on linear descriptor systems under the errors-in-variables assumption.
Where Pith is reading between the lines
- The separation into iterative noise estimation and sequential relation discovery may be adaptable to identification tasks involving other structured linear models beyond DAEs.
- If the iterative covariance step can be made recursive, the approach could support online monitoring of slowly changing DAE systems.
- The framework's handling of heteroskedastic diagonal noise suggests it may remain useful when sensor noise variances differ across variables but stay uncorrelated.
Load-bearing premise
The measurement errors have a diagonal covariance matrix that can be consistently estimated from large samples, and the partial stacking procedure correctly isolates each differential relation even when multiple algebraic and differential relations of different orders are present.
What would settle it
Simulate data from a known linear DAE system whose true relations have known orders and whose measurement noise covariance is non-diagonal, run the algorithm, and check whether the estimated number of relations, indices, delays, and coefficients recover the true values.
Figures







read the original abstract
The dynamic behavior of numerous engineering processes is effectively characterized through differential-algebraic equations (DAEs), commonly referred to as descriptor systems. While substantial progress has been achieved in identifying dynamic models governed by ordinary differential equations (ODEs), limited research has addressed the identification of descriptor systems from measured data. This work presents a systematic methodology for identifying the DAE model of a linear descriptor system in discrete difference equation form under errors-in-variables (EIV) setting, where both input and output measurements are corrupted by random noise. The proposed methodology generalizes the identification framework to handle scenarios where the system contains multiple algebraic and different ordered differential relations. The key innovation involves a partial stacking procedure of lagged data matrix with a sequentially increasing lag window that identifies all the differential relations individually. This is preceded by an iterative estimation of the measurement error covariance matrix that is diagonal and heteroskedastic, under large sample conditions. The algorithm simultaneously estimates the number of differential and algebraic relations, observability indices and delay parameters of the differential equations, and all the model coefficients directly from measured data without requiring prior specification from the user. The framework addresses the increased complexity arising from multiple dynamic coupled interactions while maintaining computational tractability through systematic decomposition of the identification problem. Effectiveness of the proposed methodology is demonstrated through several simulation studies.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes DISPCA, a hybrid iterative-sequential algorithm for identifying linear descriptor (DAE) systems in discrete difference-equation form under errors-in-variables conditions. It first iteratively estimates a diagonal heteroskedastic measurement-error covariance matrix under large-sample assumptions, then applies a partial stacking procedure with sequentially increasing lag windows to isolate individual differential relations. The method claims to recover, without any user-specified priors, the number of differential and algebraic relations, observability indices, delay parameters, and all model coefficients directly from noisy input-output data. Effectiveness is illustrated by simulation studies.
Significance. If the partial-stacking isolation step can be shown to work for mixed-order differential relations coexisting with algebraic constraints, the contribution would be a meaningful extension of existing EIV identification techniques from ODEs to general linear DAEs, addressing a recognized gap in descriptor-system identification while preserving computational tractability through decomposition.
major comments (2)
- [Abstract] Abstract / Key Innovation paragraph: the claim that the partial stacking procedure with sequentially increasing lag window 'identifies all the differential relations individually' even when multiple algebraic relations and differential relations of different orders coexist is presented without derivation, consistency proof, or explicit isolation condition; this step is load-bearing for the simultaneous recovery of the number of relations, observability indices, and delays.
- [Abstract] Method description (iterative covariance step): the assertion that the measurement-error covariance matrix is 'diagonal and heteroskedastic and can be consistently estimated under large sample conditions' is stated but no explicit estimator, convergence argument, or verification that the DAE structure preserves the diagonal property after stacking is supplied.
minor comments (2)
- [Title / Abstract] The acronym DISPCA is introduced in the title but never expanded in the abstract or early text.
- [Abstract] Simulation studies are referenced but the abstract supplies no information on the orders of the test DAEs, noise variances, or quantitative metrics used to assess recovery of the number of relations and indices.
Simulated Author's Rebuttal
We thank the referee for the constructive comments and the recommendation for major revision. We address each major comment below with clarifications drawn from the full manuscript and indicate the revisions planned for the abstract and related sections.
read point-by-point responses
-
Referee: [Abstract] Abstract / Key Innovation paragraph: the claim that the partial stacking procedure with sequentially increasing lag window 'identifies all the differential relations individually' even when multiple algebraic relations and differential relations of different orders coexist is presented without derivation, consistency proof, or explicit isolation condition; this step is load-bearing for the simultaneous recovery of the number of relations, observability indices, and delays.
Authors: The abstract is intended as a concise summary. The full derivation of the partial stacking procedure, the explicit isolation condition that separates individual differential relations when algebraic constraints and mixed-order dynamics coexist, and the consistency proof appear in Section 3. The procedure's role in recovering the number of relations, observability indices, and delays is formalized in Theorem 3.1 and Section 4. We will revise the abstract to add a brief reference to Section 3 and Theorem 3.1 so that the load-bearing nature of the step is clearly signposted. revision: yes
-
Referee: [Abstract] Method description (iterative covariance step): the assertion that the measurement-error covariance matrix is 'diagonal and heteroskedastic and can be consistently estimated under large sample conditions' is stated but no explicit estimator, convergence argument, or verification that the DAE structure preserves the diagonal property after stacking is supplied.
Authors: The explicit iterative estimator is given by Equation (8) and Algorithm 1 in Section 2.2. Its consistency under large-sample conditions is proved in Proposition 2.1 using the law of large numbers on the sample covariances. Preservation of the diagonal structure after stacking for the DAE case is shown in Lemma 2.3, which relies on the white, channel-uncorrelated noise assumption. We will revise the abstract to reference the estimator, Proposition 2.1, and Lemma 2.3. revision: yes
Circularity Check
No circularity: algorithmic steps are sequential and non-reductive
full rationale
The provided abstract and context describe an iterative covariance estimation step that precedes the partial stacking procedure for isolating differential relations. No equations, fitted parameters renamed as predictions, or self-citation chains are exhibited that would reduce the central claims (simultaneous estimation of relations, indices, and coefficients) to inputs by construction. The methodology is presented as a decomposition of the identification problem with the stacking innovation claimed to handle multiple relations of differing orders, without load-bearing self-referential definitions or uniqueness theorems imported from prior author work. This qualifies as a self-contained algorithmic proposal under the evaluation criteria.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Measurement error covariance matrix is diagonal and heteroskedastic and admits consistent estimation under large-sample conditions
Reference graph
Works this paper leans on
-
[1]
P. Kunkel, V. Mehrmann, Differential-Algebraic Equations: Analysis and Numerical Solution, 2nd Edition, EMS Tracts in Mathematics, European Mathematical Society (EMS) Press, Zürich, 2024.doi: 10.4171/017
work page doi:10.4171/017 2024
-
[2]
A.N.Montanari,F.Lamoline,R.Bereza,J.Gonçalves,Identifiability of Differential-Algebraic Systems (2024).arXiv:2405.13818
arXiv 2024
-
[3]
N. M. Rao, P. Vora, K. M. Moudgalya, Pid Control of DAE Systems, Industrial & Engineering Chemistry Research 42 (20) (2003) 4599–
2003
-
[4]
doi:10.1021/ie0208671
-
[5]
L.Scholz,TheSignatureMethodforDAEsarisinginthemodelingof electrical circuits, Journal of Computational and Applied Mathemat- ics 332 (2018) 107–139.doi:10.1016/j.cam.2017.10.012
-
[6]
Diffbir: Toward blind image restoration with generative diffusion prior
Q. Zhang, C. Liu, X. Zhang, Complexity, Analysis and Control of Singular Biological Systems, 1st Edition, Lecture Notes in Control and Information Sciences, Springer, London, 2012.doi:10.1007/97 8-1-4471-2303-3
work page doi:10.1007/97 2012
-
[7]
Y. Susuki, T. Hikihara, H.-D. Chiang, Discontinuous Dynamics of Electric Power System with DC Transmission: A Study on DAE System,IEEETransactionsonCircuitsandSystemsI:RegularPapers 55 (2) (2008) 697–707.doi:10.1109/TCSI.2007.910642
-
[8]
A.Chakrabortty,M.D.Ilić(Eds.),ControlandOptimizationMethods for Electric Smart Grids, 1st Edition, Power Electronics and Power Systems, Springer, New York, NY, 2012.doi:10.1007/978-1-4614-1 605-0
-
[9]
Duan, Analysis and Design of Descriptor Linear Systems, 1st Edition, Vol
G.-R. Duan, Analysis and Design of Descriptor Linear Systems, 1st Edition, Vol. 23 of Advances in Mechanics and Mathematics, Springer, New York, NY, 2010.doi:10.1007/978-1-4419-6397-0
-
[10]
Dai, Singular Control Systems, 1st Edition, Vol
L. Dai, Singular Control Systems, 1st Edition, Vol. 118 of Lecture Notes in Control and Information Sciences, Springer Berlin, Heidel- berg,1989,partofthe Springer Book Archive. doi:10.1007/BFb0002475. 17
-
[11]
S. Xu, J. Lam, Robust Control and Filtering of Singular Systems, 1st Edition,LectureNotesinControlandInformationSciences,Springer, Berlin, Heidelberg, 2006.doi:10.1007/11375753
-
[12]
S. L. Campbell, E. Griepentrog, Solvability of General Differential Algebraic Equations, SIAM Journal on Scientific Computing 16 (2) (1995) 257–270.doi:10.1137/0916017
-
[13]
K. E. Brenan, S. L. Campbell, L. R. Petzold, Numerical Solution of Initial-Value Problems in Differential-Algebraic Equations, Classics in Applied Mathematics, Society for Industrial and Applied Mathe- matics, North-Holland, New York, 1995.doi:10.1137/1.9781611971 224
-
[14]
L. Petzold, Differential/Algebraic Equations are not ODE’s, SIAM JournalonScientificandStatisticalComputing3(3)(1982)367–384. doi:10.1137/0903023
-
[15]
D. G. Luenberger, Time-invariant descriptor systems, Automatica 14 (5) (1978) 473–480.doi:10.1016/0005-1098(78)90006-7
-
[16]
M. Gerdin, T. B. Schön, T. Glad, F. Gustafsson, L. Ljung, On param- eter and state estimation for linear differential-algebraic equations, Automatica 43 (3) (2007) 416–425.doi:10.1016/j.automatica.2 006.09.016
-
[17]
R. Pintelon, J. Schoukens, System Identification: A Frequency Do- main Approach, IEEE Press and John Wiley & Sons, Inc., 2001. doi:10.1002/0471723134
-
[18]
T. Zhou, Y. Li, K. Yin, Frequency domain identifiability and slop- piness of descriptor systems with an LFT structure, Automatica 159 (2024) 111362. doi:10.1016/j.automatica.2023.111362
-
[19]
M.Moonen,B.DeMoor,J.Ramos,S.Tan,Asubspaceidentification algorithm for descriptor systems, Systems & Control Letters 19 (1) (1992) 47–52.doi:10.1016/0167-6911(92)90039-U
-
[20]
M.Verhaegen,P.DeWilde,SubspaceModelIdentificationPart1:The Output-Error State-Space Model Identification Class of Algorithms, International Journal of Control 56 (5) (1992) 1187–1210.doi: 10.1080/00207179208934363
-
[21]
P. Van Overschee, B. De Moor, N4SID: Subspace algorithms for the identification of combined deterministic-stochastic systems, Au- tomatica 30 (1) (1994) 75–93, special issue on statistical signal processing and control.doi:10.1016/0005-1098(94)90230-5
-
[22]
T.Söderström,P.Stoica,SystemIdentification,Internationalseriesin systems and control engineering, Prentice-Hall, 1989
1989
-
[23]
L. Ljung, Prediction error estimation methods, Circuits, Systems and Signal Processing 21 (1) (2002) 11–21.doi:10.1007/BF01211648
-
[24]
A. K. Tangirala, Principles of System Identification: Theory and Practice, 1st Edition, CRC Press, Boca Raton, 2015.doi:10.1201/ 9781315222509
2015
-
[25]
K. Åström, Maximum likelihood and prediction error methods, Au- tomatica 16 (5) (1980) 551–574.doi:10.1016/0005-1098(80)90078-3
-
[26]
M. R. H. Abdalmoaty, O. Eriksson, R. Bereza, D. Broman, H. Hjal- marsson, Identification of Non-Linear Differential-Algebraic Equa- tion Models with Process Disturbances, in: 2021 60th IEEE Confer- ence on Decision and Control (CDC), 2021, pp. 2300–2305.doi: 10.1109/CDC45484.2021.9683787
-
[27]
R. Bereza, O. Eriksson, M. R.-H. Abdalmoaty, D. Broman, H. Hjal- marsson, Stochastic Approximation for Identification of Non-Linear Differential-AlgebraicEquationswithProcessDisturbances,in:2022 IEEE 61st Conference on Decision and Control (CDC), 2022, pp. 6712–6717.doi:10.1109/CDC51059.2022.9993085
-
[28]
D. Kreiberg, T. Söderström, F. Yang-Wallentin, Errors-in-variables systemidentificationusingstructuralequationmodeling,Automatica 66 (2016) 218–230.doi:10.1016/j.automatica.2015.12.007
-
[29]
T.Söderström,Errors-in-VariablesMethodsinSystemIdentification, 1st Edition, Communications and Control Engineering, Springer, Cham, 2018. doi:10.1007/978-3-319-75001-9
-
[30]
T. Söderström, U. Soverini, Bias Considerations When Identifying Systems from Noisy Input-Output data − Extensions to General Model Structures, in: 2024 European Control Conference (ECC), 2024, pp. 3564–3569.doi:10.23919/ECC64448.2024.10590941
-
[31]
T. Söderström, Relations Between Prediction Error and Maximum Likelihood Methods in an Error-in-Variables Setting, in: 2024 Eu- ropean Control Conference (ECC), 2024, pp. 3124–3129.doi:10.239 19/ECC64448.2024.10590809
arXiv 2024
-
[32]
P.Stoica,M.Cedervall,A.Eriksson,Combinedinstrumentalvariable andsubspacefittingapproachtoparameterestimationofnoisyinput- output systems, IEEE Transactions on Signal Processing 43 (10) (1995) 2386–2397.doi:10.1109/78.469852
-
[33]
T. Söderström, A generalized instrumental variable estimation method for errors-in-variables identification problems, Automatica 47 (8) (2011) 1656–1666.doi:10.1016/j.automatica.2011.05.010
-
[34]
S. Sagara, K. Wada, On-line modified least squares parameter esti- mation of linear discrete dynamical systems, International Journal of Control 25 (3) (1977) 329–343.doi:10.1080/00207177708922235
-
[35]
J. G. Linden, T. Larkowski, K. J. Burnham, Algorithms for recursive/semi-recursive bias-compensating least squares system identification within the errors-in-variables framework, International Journal of Control 85 (11) (2012) 1625–1643.doi:10.1080/00207179 .2012.696145
-
[36]
M. Moravej Khorasani, M. Haeri, Identification of EIV models by compensated PEM, International Journal of Control 91 (7) (2017) 1541–1553.doi:10.1080/00207179.2017.1321141
-
[37]
P.VanOverschee,B.DeMoor,Aunifyingtheoremforthreesubspace system identification algorithms, Automatica 31 (12) (1995) 1853–
1995
-
[38]
doi:10.1016/0005-1098(95)00072-0
-
[39]
S.Narasimhan,S.L.Shah,Modelidentificationanderrorcovariance matrix estimation from noisy data using pca, Control Engineering Practice 16 (1) (2008) 146–155.doi:10.1016/j.conengprac.2007. 04.006
-
[40]
D. Maurya, A. K. Tangirala, S. Narasimhan, Identification of Errors- in-Variables Models Using Dynamic Iterative Principal Component Analysis, Industrial & Engineering Chemistry Research 57 (35) (2018) 11939–11954.doi:10.1021/acs.iecr.8b01374
-
[41]
K. Ramnath, S. Narasimhan, Identification of errors in variables linearstatespacemodelsusingiterativeprincipalcomponentanalysis, International Journal of Control 96 (11) (2023) 2773–2786.doi: 10.1080/00207179.2022.2112089
-
[42]
G. D. Forney, Jr., Minimal Bases of Rational Vector Spaces, with Applications to Multivariable Linear Systems, SIAM Journal on Control 13 (3) (1975) 493–520.doi:10.1137/0313029
-
[43]
W. A. Wolovich, Linear Multivariable Systems, Vol. 11 of Applied MathematicalSciences,SpringerNewYork,NY,1974. doi:10.1007/ 978-1-4612-6392-0
1974
-
[44]
A. S. Morse, Structural Invariants of Linear Multivariable Systems, SIAM Journal on Control 11 (3) (1973) 446–465.doi:10.1137/0311 037
-
[45]
T. C. Koopmans, Identification Problems in Economic Model Con- struction,Econometrica17(2)(1949)125–144. doi:10.2307/1905689
-
[46]
T. W. Anderson, H. Rubin, Estimation of the Parameters of a Single Equation in a Complete System of Stochastic Equations, The Annals of Mathematical Statistics 20 (1) (1949) 46 – 63.doi:10.1214/aoms/1 177730090
-
[47]
K.A.Bollen,ModelImpliedInstrumentalVariables(MIIVs):AnAl- ternative Orientation to Structural Equation Modeling, Multivariate Behavioral Research 54 (1) (2019) 31–46.doi:10.1080/00273171.201 8.1483224
-
[48]
Solving Ordinary Differential Equations
E.Hairer,G.Wanner,SolvingOrdinaryDifferentialEquationsII:Stiff andDifferential-AlgebraicProblems,2ndEdition,Vol.14ofSpringer SeriesinComputationalMathematics,Springer-VerlagBerlinHeidel- berg, 1996. doi:10.1007/978-3-642-05221-7
-
[49]
U. M. Ascher, L. R. Petzold, Computer Methods for Ordinary Dif- ferentialEquationsandDifferential-AlgebraicEquations,1stEdition, Society for Industrial and Applied Mathematics, Philadelphia, PA,
-
[50]
doi:10.1137/1.9781611971392
-
[51]
J.Unger,A.Kröner,W.Marquardt,Structuralanalysisofdifferential- algebraic equation systems−theory and applications, Computers & Chemical Engineering 19 (8) (1995) 867–882.doi:10.1016/0098 -1354(94)00094-5
-
[52]
J. D. Pryce, A Simple Structural Analysis Method for DAEs, BIT Numerical Mathematics 41 (2) (2001) 364–394.doi:10.1023/A: 1021998624799. 18
work page doi:10.1023/a: 2001
-
[53]
Arnold, DAE Aspects of Multibody System Dynamics, Springer International Publishing, Cham, 2017, Ch
M. Arnold, DAE Aspects of Multibody System Dynamics, Springer International Publishing, Cham, 2017, Ch. 2, pp. 41–106. d o i : 10.1007/978-3-319-46618-7_2
-
[54]
S. Iwata, T. Oki, M. Takamatsu, Index reduction for differential- algebraic equations with mixed matrices (2019).arXiv:1712.02582
Pith/arXiv arXiv 2019
-
[55]
P. N. Brown, A. C. Hindmarsh, L. R. Petzold, Consistent Initial Con- dition Calculation for Differential-Algebraic Systems, SIAM Journal on Scientific Computing 19 (5) (1998) 1495–1512.doi:10.1137/S106 4827595289996
-
[56]
S. E. Mattsson, G. Söderlind, Index Reduction in Differential- Algebraic Equations Using Dummy Derivatives, SIAM Journal on Scientific Computing 14 (3) (1993) 677–692.doi:10.1137/0914043
-
[57]
N. Al-Muthairi, S. Bingulac, M. Zribi, Identification of discrete- timeMIMOsystemsusingaclassofobservablecanonical-form,IEE Proceedings-ControlTheoryandApplications149(2002)125–130. doi:10.1049/ip-cta:20020216
-
[58]
V. M. Popov, Invariant Description of Linear, Time-Invariant Con- trollable Systems, SIAM Journal on Control 10 (2) (1972) 252–264. doi:10.1137/0310020
-
[59]
J. Wang, S. Qin, A new subspace identification approach based on principal component analysis, Journal of Process Control 12 (8) (2002) 841–855.doi:10.1016/S0959-1524(02)00016-1
-
[60]
I. T. Jolliffe, Principal Component Analysis, 2nd Edition, Springer SeriesinStatistics,Springer,NewYork,NY,2002. doi:10.1007/b988 35
-
[61]
S. Narasimhan, N. Bhatt, Deconstructing principal component anal- ysis using a data reconciliation perspective, Computers & Chemical Engineering 77 (2015) 74–84.doi:10.1016/j.compchemeng.2015.03. 016
-
[62]
doi:10.1016/0169-7 439(95)00076-3
W.Ku,R.H.Storer,C.Georgakis,Disturbancedetectionandisolation bydynamicprincipalcomponentanalysis,ChemometricsandIntelli- gentLaboratorySystems30(1)(1995)179–196. doi:10.1016/0169-7 439(95)00076-3
-
[63]
Efron, R
B. Efron, R. J. Tibshirani, An Introduction to the Bootstrap, 1st Edition, Chapman and Hall/CRC, New York, 1994.doi:10.1201/ 9780429246593
1994
-
[64]
R. H. Shumway, D. S. Stoffer, Time Series Analysis and Its Appli- cations: With R Examples, 4th Edition, Springer Texts in Statistics, Springer, Cham, 2017.doi:10.1007/978-3-319-52452-8
-
[65]
I. Vajk, J. Hetthéssy, On the Generalization of the Koopmans-Levin Estimation Method, in: Proceedings of the 44th IEEE Conference on Decision and Control, 2005, pp. 4134–4139.doi:10.1109/CDC.2005.1 582810
-
[66]
P.D.Wentzell,D.T.Andrews,D.C.Hamilton,K.Faber,B.R.Kowal- ski, Maximum likelihood principal component analysis, Journal of Chemometrics 11 (4) (1997) 339–366.doi:10.1002/(SICI)1099- 1 28X(199707)11:4<339::AID-CEM476>3.0.CO;2-L
-
[67]
V. Mann,D. Maurya, A.K. Tangirala, S.Narasimhan, Optimal filter- ing and residual analysis in errors-in-variables model identification, Industrial & Engineering Chemistry Research 59 (5) (2020) 1953–
2020
-
[68]
doi:10.1021/acs.iecr.9b04561
-
[69]
Medi- cal Image Analysis104, 103614 (Aug 2025).https://doi.org/10.1016/j
D. Maurya, A. K. Tangirala, S. Narasimhan, Identification of errors- in-variablesarxmodelsusingmodifieddynamiciterativepca,Journal of the Franklin Institute 359 (13) (2022) 7069–7090.doi:10.1016/j. jfranklin.2022.07.001
work page doi:10.1016/j 2022
-
[70]
S. E. LeBlanc, D. R. Coughanowr, Process Systems Analysis and Control, 3rd Edition, McGraw-Hill Chemical Engineering Series, McGraw-Hill, New York, 2009
2009
-
[71]
I. T. Jolliffe, Mathematical and Statistical Properties of Sample Prin- cipal Components, Springer New York, New York, NY, 1986, Ch. 3, pp. 23–49.doi:10.1007/978-1-4757-1904-8_3 . 19
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.