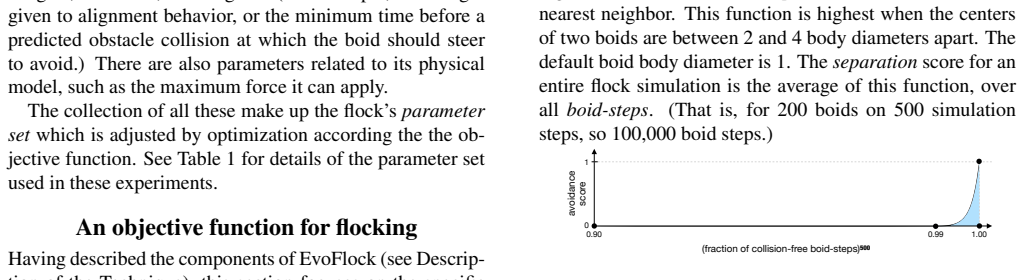
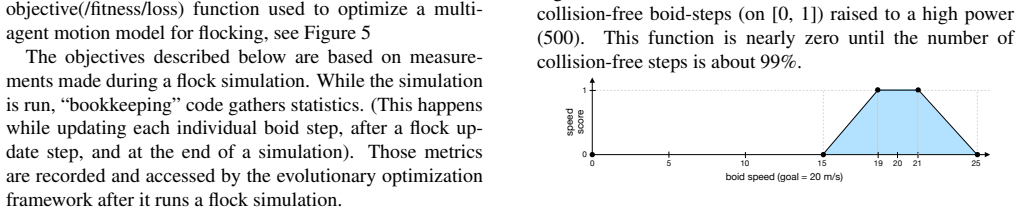
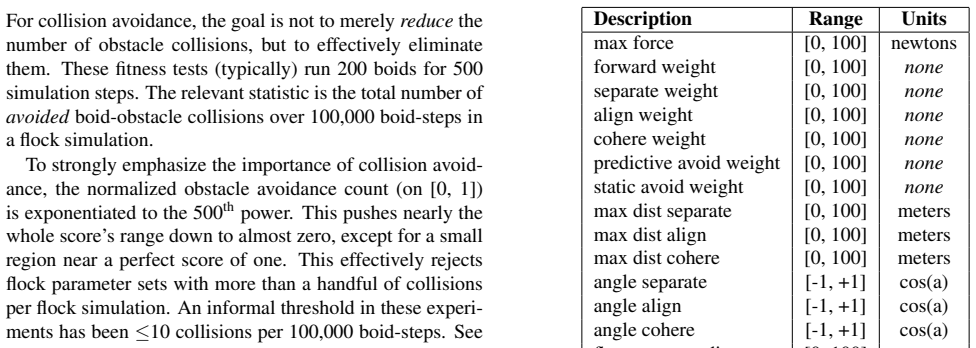
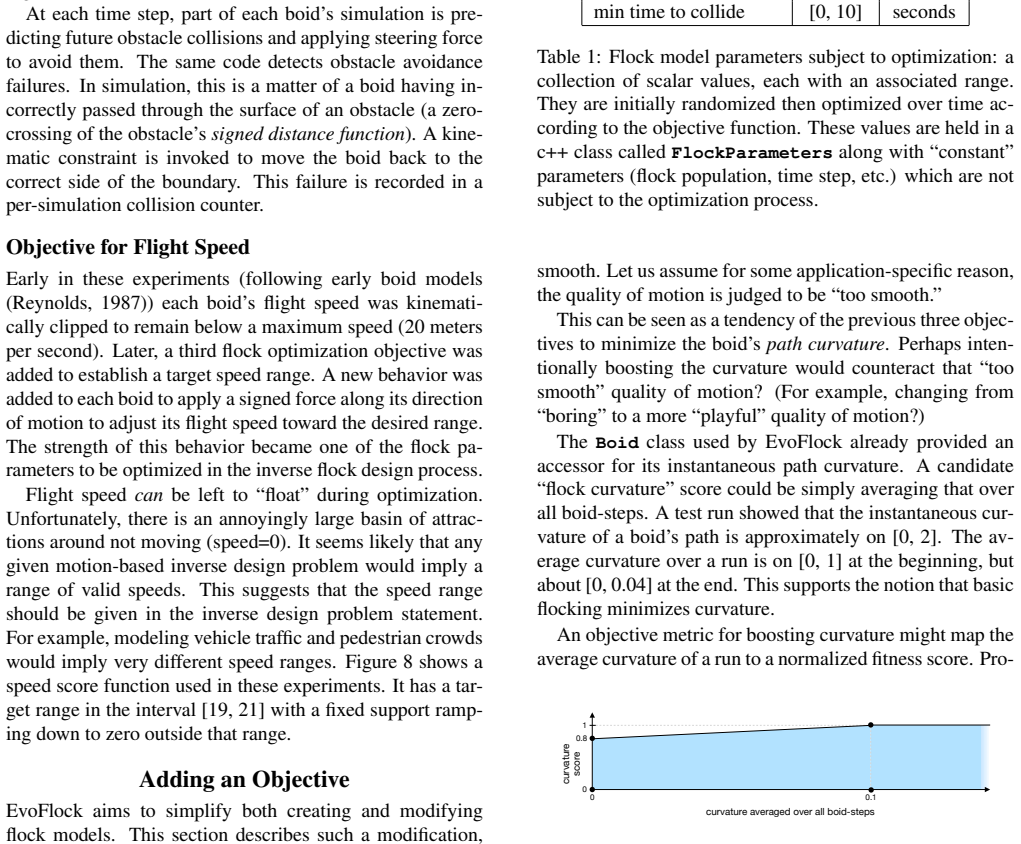
EvoFlock: evolved inverse design of multi-agent motion
Pith reviewed 2026-06-25 19:52 UTC · model grok-4.3
The pith
A genetic algorithm tunes multi-agent parameters so flocking alignment emerges from a spacing objective.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
By casting parameter tuning as an optimization problem, the genetic algorithm discovers control values that produce the target group-level motion. The objective rewards local spacing maintenance, and the emergent result includes the vivid directional alignment characteristic of flocks, showing that alignment can arise as a consequence of spacing rather than requiring a separate rule.
What carries the argument
The genetic algorithm that evolves the set of numerical control parameters to maximize a user-defined objective function based on spacing, speed, and obstacle avoidance.
If this is right
- Complex nonlinear interactions among parameters can be navigated without incremental manual trial and error.
- A single objective function can be used to adapt the same underlying agent model to different group scenarios such as crowds or traffic.
- Alignment need not be encoded as an explicit behavioral rule when spacing maintenance is already rewarded.
- Changing one measured aspect of group behavior no longer forces unintended changes in unrelated aspects.
Where Pith is reading between the lines
- The same optimization loop could be reused for other multi-agent domains if new objective functions are written for those domains.
- Observed natural group patterns may often reduce to consequences of a few local geometric constraints rather than many separate rules.
- Adding further local measurements to the objective, such as density variation or turning rate, would test whether additional emergent traits can be evolved.
Load-bearing premise
The objective function built from spacing, speed, and obstacle avoidance is sufficient to drive the search toward the full range of intended group behaviors.
What would settle it
Running the optimized parameters in simulation and measuring zero or near-zero alignment correlation among nearby agents despite high objective scores.
Figures



read the original abstract
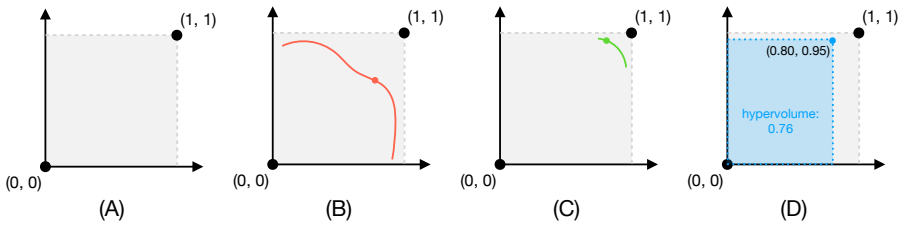
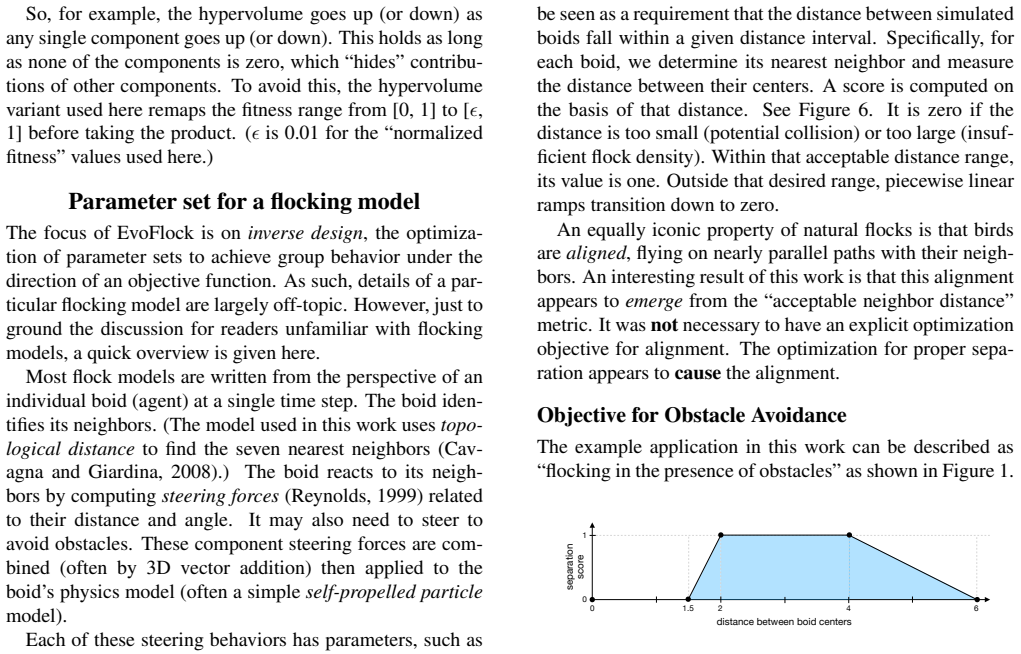
This paper describes an automatic method for adjusting or tuning models of multi-agent motion. Simulating the motion of bird flocks, human crowds, vehicle traffic, and other multi-agent systems is a widely used technique. These simulations model the behavior of a single group member (bird, human, or vehicle). The group behaviors (flock, crowd, traffic) emerge from interactions between group members. These models typically have many numerical control parameters. Even if each parameter is intuitive in isolation, their interaction can be complex and nonlinear. It is challenging to determine which parameters to adjust for the desired change in group behavior. Changing one aspect of group behavior often causes other aspects to change, leading to a tedious process of incremental changes. This work takes an inverse design approach. The desired group behavior is measured with a user-defined objective(/fitness/loss) function and optimized with a genetic algorithm. The objective function used here for basic flocking rewards proper spacing with neighbors, flying near a desired speed, and avoiding obstacles. Interestingly, the vivid alignment seen in bird flocks appears to emerge from maintaining proper spacing between flockmates.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript describes EvoFlock, an inverse-design method that applies a genetic algorithm to optimize the numerical control parameters of multi-agent motion models. The user-defined fitness function rewards neighbor spacing, target speed, and obstacle avoidance; the central observation is that vivid alignment (as seen in bird flocks) emerges from the spacing term alone without being directly optimized.
Significance. If the emergence claim can be placed on a quantitative footing, the approach would offer a practical way to automate tuning of multi-agent simulators whose parameters interact nonlinearly. The observation that alignment can arise from a spacing-only objective would also be of interest to the study of minimal flocking rules. No machine-checked proofs, reproducible code, or parameter-free derivations are presented.
major comments (2)
- [Abstract] Abstract: the claim that 'vivid alignment ... appears to emerge from maintaining proper spacing' is load-bearing for the paper's main contribution, yet no alignment metric (polarization order parameter, mean velocity correlation, etc.) is defined or computed. Without such a metric the emergence conclusion rests on unquantified visual inspection and cannot be distinguished from incidental effects of the underlying motion rules.
- [Abstract] Abstract: the manuscript supplies no implementation details (population size, number of generations, mutation/crossover operators, motion-model equations), experimental results, validation metrics, or error analysis. Consequently it is impossible to verify whether the genetic algorithm reaches the claimed behaviors or whether the fitness function is sufficient.
Simulated Author's Rebuttal
We thank the referee for the detailed report and the opportunity to clarify the manuscript. We respond to each major comment below.
read point-by-point responses
-
Referee: [Abstract] Abstract: the claim that 'vivid alignment ... appears to emerge from maintaining proper spacing' is load-bearing for the paper's main contribution, yet no alignment metric (polarization order parameter, mean velocity correlation, etc.) is defined or computed. Without such a metric the emergence conclusion rests on unquantified visual inspection and cannot be distinguished from incidental effects of the underlying motion rules.
Authors: We agree that the emergence claim requires quantitative support. The revised manuscript will define the polarization order parameter (magnitude of the mean normalized velocity vector) and report its values for the spacing-only objective versus other objectives, allowing direct comparison to visual results. revision: yes
-
Referee: [Abstract] Abstract: the manuscript supplies no implementation details (population size, number of generations, mutation/crossover operators, motion-model equations), experimental results, validation metrics, or error analysis. Consequently it is impossible to verify whether the genetic algorithm reaches the claimed behaviors or whether the fitness function is sufficient.
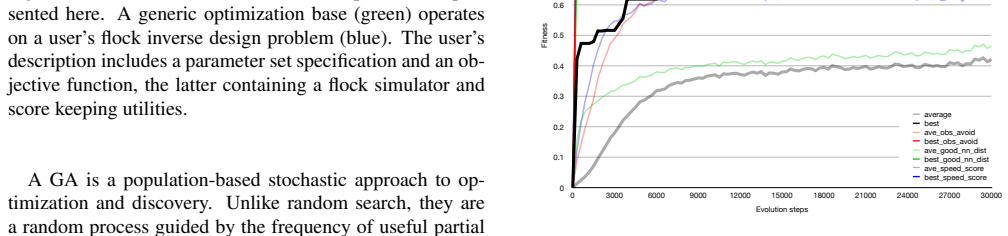
Authors: The full manuscript contains these elements in the Methods (motion equations, GA operators, population size 100, 50 generations) and Results sections (fitness curves, example trajectories). To improve accessibility we will add a parameter summary table and explicit validation metrics to the abstract and main text. revision: partial
Circularity Check
No circularity: standard GA inverse design with observational emergence claim
full rationale
The paper applies a genetic algorithm to optimize a user-specified objective function (spacing, speed, obstacle avoidance) for multi-agent parameters. Alignment is described as an observed side-effect in simulation results rather than a quantity derived from equations that reduce to the fitness inputs by construction. No self-definitional mappings, fitted parameters renamed as predictions, or load-bearing self-citations appear in the abstract or described method. The derivation chain is a conventional optimization loop whose outputs are not mathematically forced to match the inputs.
Axiom & Free-Parameter Ledger
free parameters (1)
- motion model control parameters
axioms (1)
- domain assumption Group behaviors emerge from interactions between group members following individual rules.
Reference graph
Works this paper leans on
-
[1]
Antipov, Denis and Doerr, Benjamin , month = may, year =. Evolutionary. doi:10.48550/arXiv.2409.00306 , abstract =
-
[2]
Bulletin of the Japanese society of scientific fisheries , author =
A simulation study of the schooling mechanism in fish , volume =. Bulletin of the Japanese society of scientific fisheries , author =. 1982 , keywords =. doi:10.2331/suisan.48.1081 , number =
-
[3]
Journal of Theoretical Biology , author =
Simulating flocks on the wing: the fuzzy approach , volume =. Journal of Theoretical Biology , author =. 2005 , keywords =. doi:10.1016/j.jtbi.2004.10.003 , abstract =
-
[4]
Organized flight in birds , volume =. Animal Behaviour , author =. 2009 , keywords =. doi:10.1016/j.anbehav.2009.07.007 , abstract =
-
[5]
Journal of Machine Learning Research , author =
Automatic. Journal of Machine Learning Research , author =. 2018 , keywords =
2018
-
[6]
New Journal of Physics , author =
Collective decision making in cohesive flocks , volume =. New Journal of Physics , author =. 2010 , note =. doi:10.1088/1367-2630/12/9/093019 , abstract =
-
[7]
Learning to flock in open space by avoiding collisions and staying together , url =
Brambati, Martino and Celani, Antonio and Gherardi, Marco and Ginelli, Francesco , month = jun, year =. Learning to flock in open space by avoiding collisions and staying together , url =. doi:10.48550/arXiv.2506.15587 , abstract =
-
[8]
Self-organization in biological systems , language =
Camazine, Scott and Deneubourg, Jean-Louis and Franks, Nigel R and Sneyd, James and Theraula, Guy and Bonabeau, Eric , month = aug, year =. Self-organization in biological systems , language =
-
[9]
The seventh starling , volume =. Significance , author =. 2008 , note =. doi:10.1111/j.1740-9713.2008.00288.x , abstract =
-
[10]
Flocking with random non-reciprocal interactions , url =
Choi, Jiwon and Noh, Jae Dong and Rieger, Heiko , month = jun, year =. Flocking with random non-reciprocal interactions , url =. doi:10.48550/arXiv.2506.22060 , abstract =
-
[11]
arXiv preprint arXiv:2502.14706 , year=
Cornelisse, Daphne and Pandya, Aarav and Joseph, Kevin and Suárez, Joseph and Vinitsky, Eugene , month = may, year =. Building reliable sim driving agents by scaling self-play , url =. doi:10.48550/arXiv.2502.14706 , abstract =
-
[12]
Journal of Theoretical Biology , author =
Collective. Journal of Theoretical Biology , author =. 2002 , keywords =. doi:10.1006/jtbi.2002.3065 , abstract =
-
[13]
IEEE Transactions on Automatic Control , author =
Emergent. IEEE Transactions on Automatic Control , author =. 2007 , note =. doi:10.1109/TAC.2007.895842 , abstract =
-
[14]
Cusumano-Towner, Marco and Hafner, David and Hertzberg, Alex and Huval, Brody and Petrenko, Aleksei and Vinitsky, Eugene and Wijmans, Erik and Killian, Taylor and Bowers, Stuart and Sener, Ozan and Krähenbühl, Philipp and Koltun, Vladlen , month = feb, year =. Robust. doi:10.48550/arXiv.2502.03349 , abstract =
-
[15]
Darwin, Charles , year =. On the
-
[16]
Evolutionary Computation: A Unified Approach , isbn =
De Jong, Kenneth A , month = mar, year =. Evolutionary Computation: A Unified Approach , isbn =
-
[17]
Deb, Kalyanmoy , month = may, year =. Multi-
-
[18]
Evolution of. PLOS ONE , author =. 2017 , note =. doi:10.1371/journal.pone.0168876 , abstract =
-
[19]
and Selig, Michael S
Dimock, Glen A. and Selig, Michael S. , month = jan, year =. The
-
[20]
Morphogenetic engineering: toward programmable complex systems , publisher =
Doursat, René and Sayama, Hiroki and Michel, Olivier , year =. Morphogenetic engineering: toward programmable complex systems , publisher =
-
[21]
El Saliby, Michel and Nadizar, Giorgia and Salvato, Erica and Medvet, Eric , month = aug, year =. Eventually, all you need is a simple evolutionary algorithm (for neuroevolution of continuous control policies) , isbn =. Proceedings of the. doi:10.1145/3638530.3664112 , abstract =
-
[22]
Shaping collective behavior: an exploratory design approach , isbn =
Funes, Pablo and Orme, Belinda and Bonabeau, Eric , editor =. Shaping collective behavior: an exploratory design approach , isbn =. 2004 , note =. doi:10.7551/mitpress/1429.003.0039 , booktitle =
-
[23]
Gong, Xianjin and Gain, James and Rohmer, Damien and Lyonnet, Sixtine and Pettré, Julien and Cani, Marie-Paule , month = sep, year =. Herds. Computer Graphics Forum , publisher =. doi:10.1111/cgf.70225 , abstract =
-
[24]
Optimization Methods and Software , author =. 2021 , note =. doi:10.1080/10556788.2020.1808977 , abstract =
-
[25]
Frank Heppner and Ulf Grenander , month = jan, year =. A. The
-
[26]
Hereford, James and Blum, Christian , month = oct, year =. Third. doi:10.1109/NaBIC.2011.6089411 , abstract =
-
[27]
Journal of Theoretical Biology , author =
Flock2:. Journal of Theoretical Biology , author =. 2024 , keywords =. doi:10.1016/j.jtbi.2024.111880 , abstract =
-
[28]
Adaptation in natural and artificial systems , isbn =
Holland, John H , year=. Adaptation in natural and artificial systems , isbn =
-
[29]
https: //doi.org/10.1126/science.aau6249
Human-level performance in first-person multiplayer games with population-based deep reinforcement learning , volume =. Science , author =. 2019 , note =. doi:10.1126/science.aau6249 , abstract =
-
[30]
Commanding emergent behavior with neural networks , volume =
Kim, Dongjo and Lee, Jeongsu and Kim, Ho-Young , month = oct, year =. Commanding emergent behavior with neural networks , volume =. Cell Reports Physical Science , publisher =. doi:10.1016/j.xcrp.2025.102857 , language =
-
[31]
, month = dec, year =
Koza, John R. , month = dec, year =. Genetic
-
[32]
Montanari, Arthur N. and Barioni, Ana Elisa D. and Duan, Chao and Motter, Adilson E. , month = apr, year =. Optimal flock formation induced by agent heterogeneity , url =. doi:10.48550/arXiv.2504.12297 , abstract =
-
[33]
Fuzzy model of bird flock foraging behavior , volume =
Mo. Fuzzy model of bird flock foraging behavior , volume =. Proceedings of. 2007 , file =
2007
-
[34]
Advances in Biophysics , author =
Dynamical aspects of animal grouping:. Advances in Biophysics , author =. 1986 , keywords =. doi:10.1016/0065-227x(86)90003-1 , abstract =
-
[35]
Parkar, Devendra and Leyba, Kirtus G. and Faerber, Raylene A. and Daymude, Joshua J. , month = jul, year =. Evolving. Proceedings of the 2024. doi:10.1162/isal_a_00754 , abstract =
-
[36]
Reynolds, Craig W. , month = apr, year =. An. From. doi:10.7551/mitpress/3116.003.0052 , note =
-
[37]
Steering
Reynolds, Craig , year =. Steering. Game
-
[38]
Reynolds, Craig W. , editor =. Flocks,. Proceedings of the 14th annual conference on. 1987 , keywords =. doi:10.1145/37401.37406 , abstract =
-
[39]
On Information and Sufficiency,
A. The Annals of Mathematical Statistics , author =. 1951 , note =. doi:10.1214/aoms/1177729586 , abstract =
-
[40]
Escorting drone swarm formation: a swarm intelligence and evolutionary optimisation approach , volume =. Swarm Intelligence , author =. 2025 , keywords =. doi:10.1007/s11721-025-00250-5 , abstract =
-
[41]
Stonedahl, Forrest and Wilensky, Uri , editor =. Finding. Multi-. 2011 , keywords =. doi:10.1007/978-3-642-18345-4_5 , abstract =
-
[42]
Sun, Tianjiao and Guo, Ningyan and Gu, Haozhe and Peng, Yanyan and Feng, Zhiyong , month = sep, year =. Integrated. doi:10.48550/arXiv.2509.23905 , abstract =
-
[43]
and Barto, Andrew G
Sutton, Richard S. and Barto, Andrew G. , year =. Reinforcement
-
[44]
Syswerda, Gilbert , editor =. A. Foundations of. 1991 , doi =
1991
-
[45]
Proceedings of
Tisue, Seth and Wilensky, Uri , year =. Proceedings of
-
[46]
Flocks, herds, and schools:. Phys. Rev. E , author =. 1998 , keywords =. doi:10.1103/physreve.58.4828 , abstract =
-
[47]
Artificial fishes: physics, locomotion, perception, behavior , isbn =
Tu, Xiaoyuan and Terzopoulos, Demetri , month = jul, year =. Artificial fishes: physics, locomotion, perception, behavior , isbn =. Proceedings of the 21st annual conference on. doi:10.1145/192161.192170 , abstract =
-
[48]
Novel. Physical Review Letters , author =. 1995 , note =. doi:10.1103/PhysRevLett.75.1226 , abstract =
-
[49]
Optimized flocking of autonomous drones in confined environments , volume =. Science Robotics , author =. 2018 , keywords =. doi:10.1126/scirobotics.aat3536 , abstract =
-
[50]
Wallace, Alfred Russel , year =. On the. Journal of the proceedings of the Linnean Society, Zoology , publisher =
-
[51]
Generalized non-reciprocal phase transitions in multipopulation systems , url =
Weis, Cheyne and Hanai, Ryo , month = jul, year =. Generalized non-reciprocal phase transitions in multipopulation systems , url =. doi:10.48550/arXiv.2507.16763 , abstract =
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.