Confidence-feedback-weighted graph matching network: online-offline laser-induced damage site matching under complex interference
Pith reviewed 2026-06-30 08:07 UTC · model grok-4.3
The pith
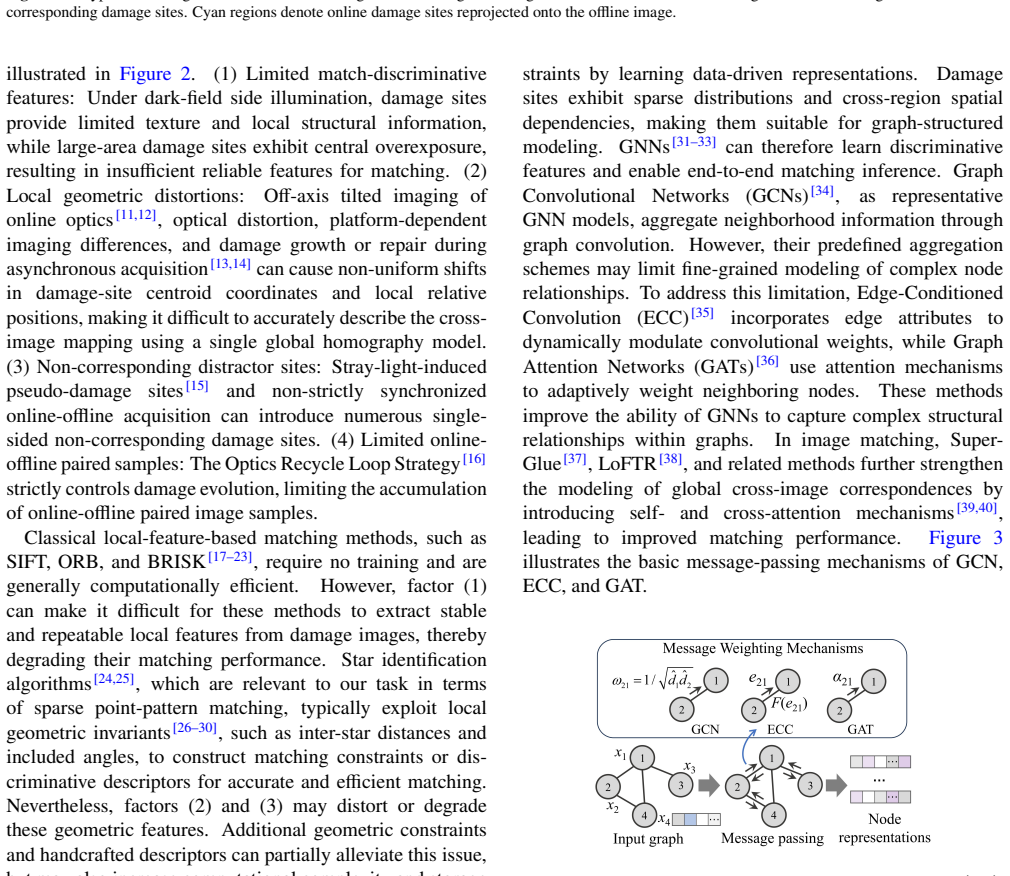
A graph matching network feeds back estimated node confidence as edge weights to suppress distractors when matching laser damage sites from coordinates alone.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
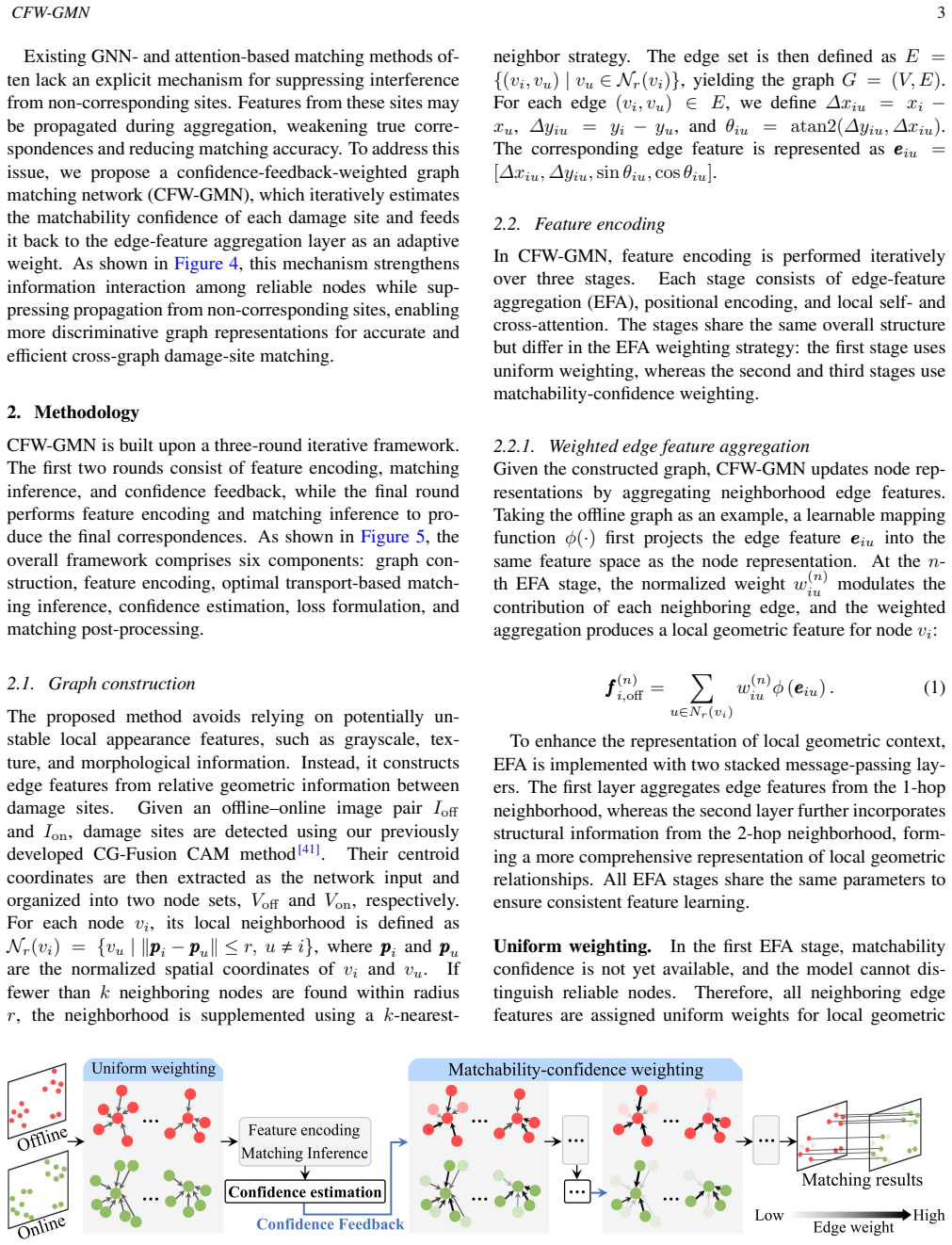
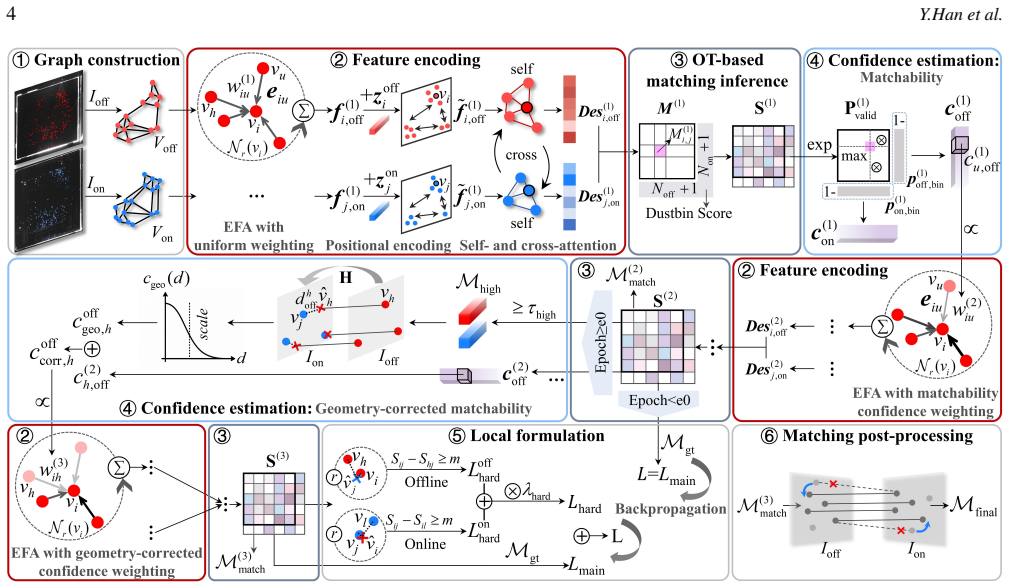
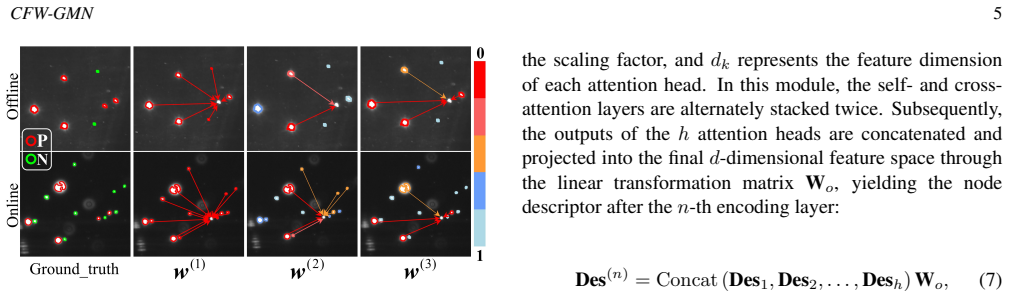
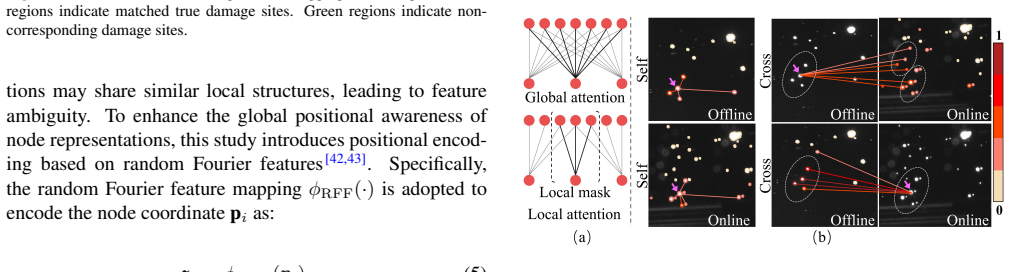
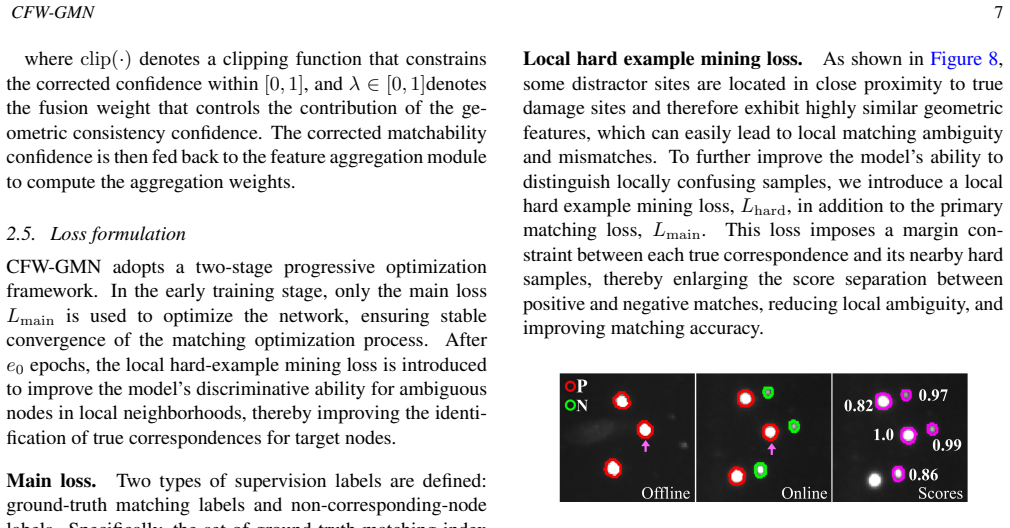
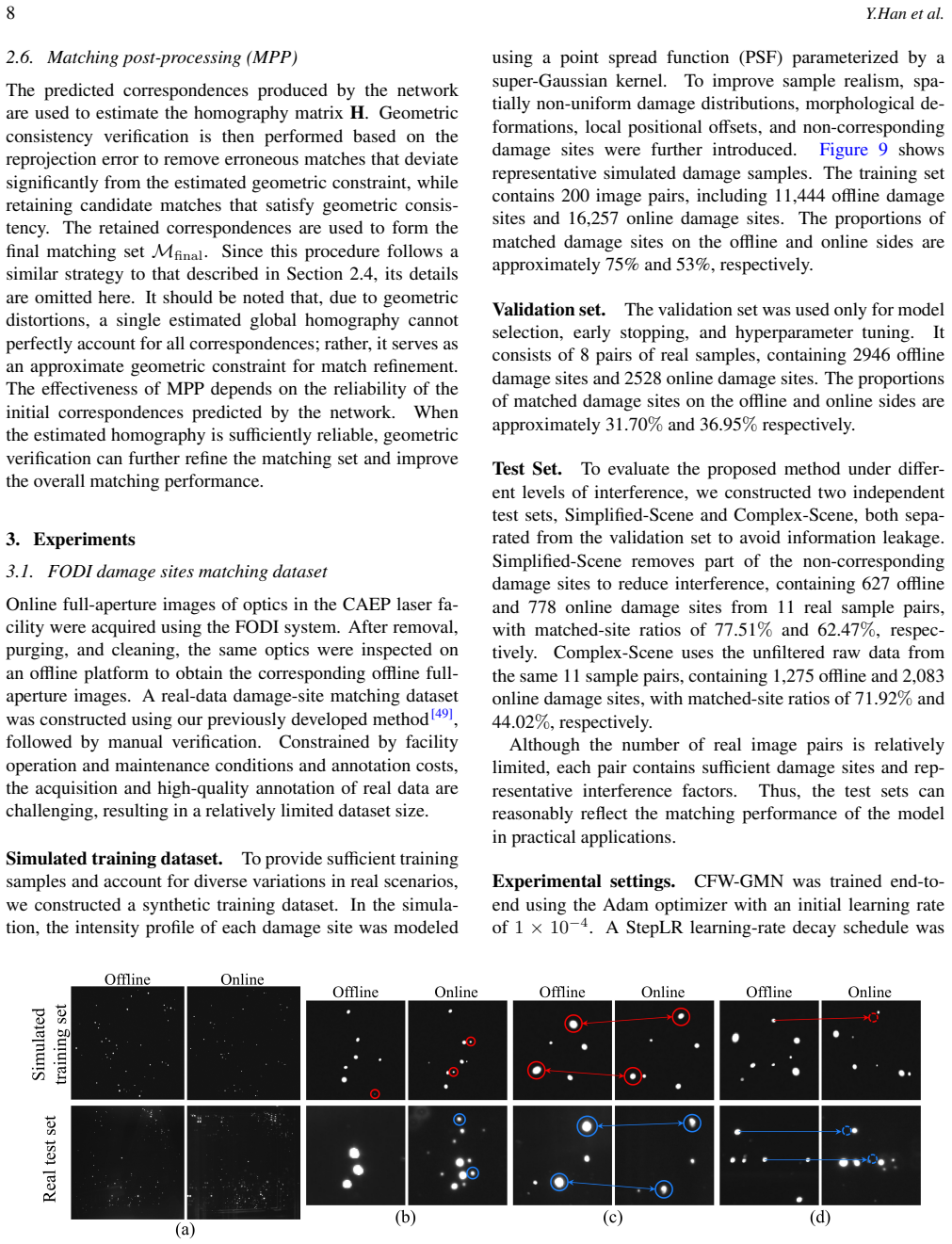
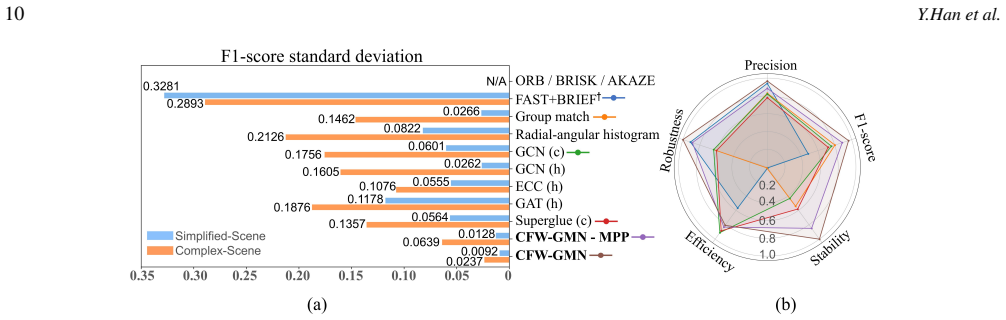
The central claim is that a confidence-feedback-weighted graph matching network, which estimates node matchability confidence from successive matching scores and feeds those confidences back as reliability weights to guide edge-feature aggregation, suppresses distractor propagation and improves cross-graph discriminability. A geometric consistency constraint calibrates spurious high-confidence estimates, and a hard-example mining loss sharpens distinction among structurally similar sites. The network operates on damage-site centroid coordinates alone and reaches 96.36 percent F1-score on the Complex-Scene dataset.
What carries the argument
The confidence-feedback-weighted graph matching network, which estimates per-node matchability confidence after each scoring round and re-uses it as an edge reliability weight in the next aggregation step.
If this is right
- Only centroid coordinates are required as input, so the method works even when richer visual features are unavailable or unreliable.
- The feedback of matchability confidence limits the spread of distractor effects through the graph.
- The added geometric consistency constraint corrects many overconfident but incorrect matches.
- Hard-example mining improves separation between sites that share similar local geometry.
- The approach yields 96.36 percent F1-score while remaining computationally efficient on the reported dataset.
Where Pith is reading between the lines
- The same feedback mechanism could be tested on other point-set matching tasks that suffer from many look-alike distractors, such as tracking features across video frames or aligning sensor readings in robotics.
- Because the method depends on geometric consistency to correct early mistakes, performance may degrade in scenes where true sites violate the assumed spatial regularity.
- Iterating the confidence feedback for more rounds than shown in the paper might further reduce residual errors in extremely cluttered images.
Load-bearing premise
That the confidence values derived from early matching scores are accurate enough to guide later steps without locking in and amplifying initial errors caused by distractors.
What would settle it
A controlled test set in which distractors are crafted to receive high initial match scores; if the final F1-score on that set falls well below 96.36 percent, the feedback loop is not suppressing errors as claimed.
Figures



read the original abstract
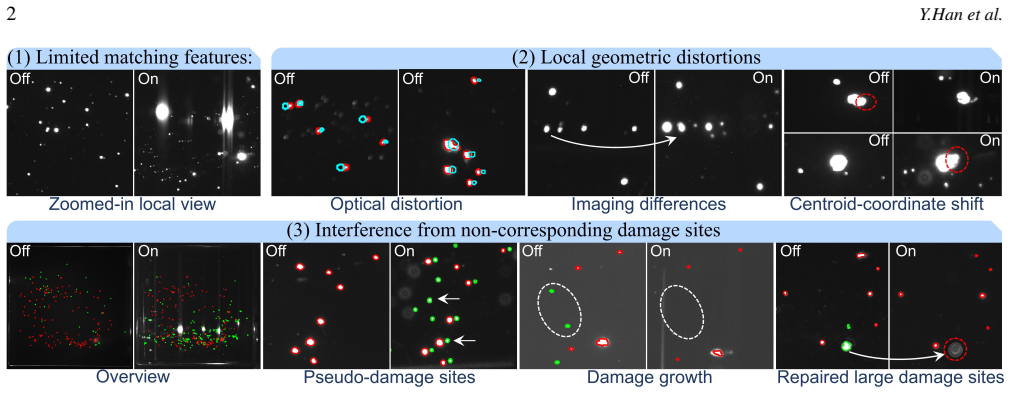
Online inspection images of final optics in high-power laser facilities contain pseudo-damage sites that closely resemble true damage sites. Determining the authenticity of online-detected sites is therefore difficult and requires accurate matching to offline ground-truth sites. However, this matching remains highly challenging due to limited match-discriminative features, local geometric distortions, and numerous distractor sites. Existing matching models mainly suppress distractors implicitly through loss-function supervision. We propose a confidence-feedback-weighted graph matching network that requires only damage-site centroid coordinates as input. It estimates node matchability confidence from each round of matching scores and feeds it back as a reliability weight to guide subsequent edge-feature aggregation, thereby suppressing distractor propagation and enhancing cross-graph discriminability. Within this framework, a geometric consistency constraint calibrates spurious high-confidence matchability estimates, while a hard-example mining loss improves discrimination between structurally similar sites. Experiments on our Complex-Scene dataset show that the proposed method achieves a matching F1-score of 96.36$\%$ with robust and efficient performance.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a confidence-feedback-weighted graph matching network for online-offline matching of laser-induced damage sites. It takes only centroid coordinates as input, iteratively estimates node matchability confidence from matching scores and feeds these back as reliability weights to guide edge-feature aggregation, applies a geometric consistency constraint to calibrate spurious estimates, and uses a hard-example mining loss. On the authors' Complex-Scene dataset the method reports a 96.36% F1-score.
Significance. If the feedback mechanism can be shown to suppress distractor propagation without amplifying early errors, the approach would offer a lightweight, coordinate-only solution to a practical inspection problem in high-power laser facilities. The geometric-consistency and hard-mining components are standard, so the novelty and performance gain rest entirely on the stability of the confidence-feedback loop.
major comments (2)
- [Method] Method section (description of iterative feedback): the claim that the geometric consistency constraint 'calibrates spurious high-confidence matchability estimates' is not accompanied by an explicit formulation or timing diagram showing whether the constraint is enforced inside the same iteration before the feedback weight is applied; without this, the risk that an initial false high-confidence distractor pair is reinforced remains unaddressed.
- [Experiments] Experiments section: no ablation isolating the confidence-feedback component versus a non-iterative baseline is reported, nor are dataset statistics (number of distractors per scene, coordinate noise levels) or error bars on the 96.36% F1 provided, making it impossible to verify that the reported gain is attributable to the feedback mechanism rather than the hard-example mining loss alone.
minor comments (1)
- [Abstract] The abstract states 'requires only damage-site centroid coordinates as input' yet later refers to 'edge-feature aggregation'; clarify whether any additional features beyond centroids are ever used.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We address each major comment below and will incorporate clarifications and additional experiments in the revised version.
read point-by-point responses
-
Referee: [Method] Method section (description of iterative feedback): the claim that the geometric consistency constraint 'calibrates spurious high-confidence matchability estimates' is not accompanied by an explicit formulation or timing diagram showing whether the constraint is enforced inside the same iteration before the feedback weight is applied; without this, the risk that an initial false high-confidence distractor pair is reinforced remains unaddressed.
Authors: We agree that the original description is insufficiently precise on the iteration timing. In the revision we will add an explicit mathematical formulation of the geometric consistency constraint (including the calibration step) together with a timing diagram that shows the constraint being enforced inside each iteration before the matchability confidence is fed back as an edge weight. This will make clear that spurious estimates are calibrated prior to influencing subsequent aggregation steps. revision: yes
-
Referee: [Experiments] Experiments section: no ablation isolating the confidence-feedback component versus a non-iterative baseline is reported, nor are dataset statistics (number of distractors per scene, coordinate noise levels) or error bars on the 96.36% F1 provided, making it impossible to verify that the reported gain is attributable to the feedback mechanism rather than the hard-example mining loss alone.
Authors: We acknowledge the absence of these controls. For the revised manuscript we will add (1) an ablation that compares the full iterative confidence-feedback model against a non-iterative baseline that uses only the hard-example mining loss, (2) dataset statistics reporting the average number of distractors per scene and the coordinate noise levels present in the Complex-Scene dataset, and (3) error bars (mean ± standard deviation over multiple random seeds) for the 96.36% F1-score. These additions will allow readers to isolate the contribution of the feedback loop. revision: yes
Circularity Check
No circularity: new architecture proposal with no self-referential derivations
full rationale
The paper introduces a novel graph matching network architecture that uses node matchability confidence feedback and a geometric consistency constraint. No equations, derivations, or parameter-fitting steps are shown that reduce the claimed F1-score or matching performance to inputs by construction. The method is presented as an empirical proposal relying on standard GNN components plus feedback weighting, without any self-definitional loops, fitted-input predictions, or load-bearing self-citations that collapse the central claim. The derivation chain remains self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Target Breakthrough Enabled Fusion Record at NIF
C. Osolin, “Target Breakthrough Enabled Fusion Record at NIF”, https://lasers.llnl.gov/news/target- breakthrough-enabled-fusion-record-nif (April 15, 2026)
2026
-
[2]
Z. Liu, J. Zhang, S. Wang, F. Geng, Q. Zhang, J. Cheng, M. Chen, and Q. Xu, “Ultrafast Process Characterization of Laser-Induced Damage in Fused Silica Using Pump- Probe Shadow Imaging Techniques”, Materials 17, 837 (2024). DOI: https://doi.org/10.3390/ma17040837
-
[3]
Full-scale optic designed for onsite study of damage growth at the Laser MegaJoule facility
C. Lacombe, L. Lamaign `ere, G. Hallo, M. Sozet, T. Donval, G. Raz’e, C. Ameil, M. Benoit, F. Gaudfrin, E. Bordenave, N. Bonod, and J. N’eauport, “Full-scale optic designed for onsite study of damage growth at the Laser MegaJoule facility”, Opt. Express 31, 4291–4305 (2023). DOI: https://doi.org/10.1364/OE.474581
-
[4]
Analysis of optics damage growth at the National Ignition Facility
Z. M. Liao, M. Nostrand, P. Whitman, and J. Bude, “Analysis of optics damage growth at the National Ignition Facility”, Proc. SPIE 9632, 963217 (2015). DOI: https://doi.org/10.1117/12.2195515
-
[5]
X. Hu, W. Zhou, H. Guo, X. Huang, B. Zhao, W. Zhong, Q. Zhu, and Z. Chen, “The Prediction of Incremental 12 Y.Han et al. Damage on Optics from the Final Optic Assembly in an ICF High-Power Laser Facility”, Appl. Sci. 14, 5226 (2024). DOI: https://doi.org/10.3390/app14125226
-
[6]
Final Optics Damage Inspection (FODI) for the National Ignition Facility
A. D. Conder, J. J. Chang, L. M. Kegelmeyer, M. L. Spaeth, and P. K. Whitman, “Final Optics Damage Inspection (FODI) for the National Ignition Facility”, Proc. SPIE 7797, 77970P (2010). DOI: https://doi.org/10.1117/12.862596
-
[7]
Automated optics inspection analysis for NIF
L. M. Kegelmeyer, R. Clark, R. R. Leach, D. McGuigan, V . M. Kamm, D. Potter, J. T. Salmon, J. Senecal, A. Conder, M. Nostrand, and P. K. Whitman, “Automated optics inspection analysis for NIF”, Fusion Eng. Des. 87, 2120–2124 (2012). DOI: https://doi.org/10.1016/j.fusengdes.2012.09.017
-
[8]
Final optics damage online inspection in high power laser facility
F. P. Wei, F. D. Chen, J. Tang, Z. T. Peng, and G. D. Liu, “Final optics damage online inspection in high power laser facility”, Optoelectron. Lett. 15, 306–311 (2019). DOI: https://doi.org/10.1007/s11801-019-8193-3
-
[9]
Automatic classification of true and false laser-induced damage in large aperture optics
F. Wei, F. Chen, B. Liu, Z. Peng, J. Tang, Q. Zhu, D. Hu, Y . Xiang, N. Liu, Z. Sun, and G. Liu, “Automatic classification of true and false laser-induced damage in large aperture optics”, Opt. Eng. 57, 053112 (2018). DOI: https://doi.org/10.1117/1.OE.57.5.053112
-
[10]
Inspection and Repair of Optical Damage in Tradition and Deep Learning (Invited)
Y . Li, J. L. Li, Z. Li, D. A. Liu, D. W. Zhang, and J. Y . Zhang, “Inspection and Repair of Optical Damage in Tradition and Deep Learning (Invited)”, Acta Photonica Sin. 51, 1012002 (2022). DOI: https://doi.org/10.3788/gzxb20225110.1012002
-
[11]
Laser performance of the SG-III laser facility
W. Zheng, X. Wei, Q. Zhu, F. Jing, D. Hu, J. Su, K. Zheng, X. Yuan, H. Zhou, W. Dai, W. Zhou, F. Wang, D. Xu, X. Xie, B. Feng, Z. Peng, L. Guo, Y . Chen, X. Zhang, L. Liu, D. Lin, Z. Dang, Y . Xiang, and X. Deng, “Laser performance of the SG-III laser facility”, High Power Laser Sci. Eng. 4, e21 (2016). DOI: https://doi.org/10.1017/hpl.2016.20
-
[12]
Injection laser system architecture, upgrades, and future at the National Ignition Fa- cility
J. E. Heebner, “Injection laser system architecture, upgrades, and future at the National Ignition Fa- cility”, Proc. SPIE 13358, 133580F (2025). DOI: https://doi.org/10.1117/12.3040268
-
[13]
C. W. Carr, “Fusion enabling laser-induced damage reduction, management, and repair strategies at the National Ignition Facility”, Proc. SPIE 12726, 1272602 (2023). DOI: https://doi.org/10.1117/12.2688417
-
[14]
X. Chai, P. Li, J. Zhao, G. Wang, D. Zhu, Y . Jiang, B. Chen, Q. Zhu, B. Feng, L. Wang, and Y . Jing, “Laser-induced damage growth of large- aperture fused silica optics under high-fluence 351 nm laser irradiation”, Optik 226, 165549 (2021). DOI: https://doi.org/10.1016/j.ijleo.2020.165549
-
[15]
X. Liang, J. Sun, X. Wang, J. Li, L. Zhang, and J. Guo, “Surface weak scratch detection for optical elements based on a multimodal imaging system and a deep encoder–decoder network”, J. Opt. Soc. Am. A 40, 1237–1248 (2023). DOI: https://doi.org/10.1364/JOSAA.483381
-
[16]
Optics Recycle Loop Strategy for NIF Operations Above UV Laser-Induced Damage Threshold
M. L. Spaeth, P. J. Wegner, T. I. Suratwala, M. C. Nostrand, J. D. Bude, A. D. Conder, J. A. Folta, J. E. Heebner, L. M. Kegelmeyer, B. J. MacGowan, D. C. Mason, M. J. Matthews, and P. K. Whitman, “Optics Recycle Loop Strategy for NIF Operations Above UV Laser-Induced Damage Threshold”, Fusion Sci. Technol. 69, 265–294 (2016). DOI: https://doi.org/10.1318...
-
[17]
Distinctive image features from scale-invariant keypoints
D. G. Lowe, “Distinctive image features from scale-invariant keypoints”, Int. J. Comput. Vis. 60, 91–110 (2004). DOI: https://doi.org/10.1023/B:VISI.0000029664.99615.94
-
[18]
SURF: Speeded Up Robust Features
H. Bay, T. Tuytelaars, and L. Van Gool, “SURF: Speeded Up Robust Features”, inComputer Vision – ECCV 2006, Lecture Notes Comput. Sci. 3951, 404–417 (2006). DOI: https://doi.org/10.1007/11744023 32
-
[19]
Faster and bet- ter: A machine learning approach to corner detection
E. Rosten, R. Porter, and T. Drummond, “Faster and bet- ter: A machine learning approach to corner detection”, IEEE Trans. Pattern Anal. Mach. Intell. 32, 105–119 (2010). DOI: https://doi.org/10.1109/TPAMI.2008.275
-
[20]
BRIEF: Computing a Local Binary Descriptor Very Fast
M. Calonder, V . Lepetit, M. ¨Ozuysal, T. Trzcinski, C. Strecha, and P. Fua, “BRIEF: Computing a Local Binary Descriptor Very Fast”, IEEE Trans. Pattern Anal. Mach. Intell. 34, 1281–1298 (2012). DOI: https://doi.org/10.1109/TPAMI.2011.222
-
[22]
URLhttps://doi.org/10.1109/ICCV.2019.00943
S. Leutenegger, M. Chli, and R. Y . Siegwart, “BRISK: Binary Robust Invariant Scalable Keypoints”, inProc. IEEE Int. Conf. Comput. Vis.2548–2555 (2011). DOI: https://doi.org/10.1109/ICCV .2011.6126542
-
[23]
Fast Explicit Diffusion for Accelerated Features in Nonlinear Scale Spaces
P. F. Alcantarilla, J. Nuevo, and A. Bartoli, “Fast Explicit Diffusion for Accelerated Features in Nonlinear Scale Spaces”, inProc. Br. Mach. Vis. Conf.13.1–13.11 (2013). DOI: https://doi.org/10.5244/C.27.13
-
[24]
A Survey of Lost-in-Space Star Identification Algorithms Since 2009
D. Rijlaarsdam, H. Yous, J. Byrne, D. Oddenino, G. Furano, and D. Moloney, “A Survey of Lost-in-Space Star Identification Algorithms Since 2009”, Sensors 20, 2579 (2020). DOI: https://doi.org/10.3390/s20092579
-
[25]
A Survey on Star Identification Algorithms
B. B. Spratling IV and D. Mortari, “A Survey on Star Identification Algorithms”, Algorithms 2, 93–107 (2009). DOI: https://doi.org/10.3390/a2010093
-
[26]
The Pyramid Star Identification Technique
D. Mortari, M. A. Samaan, C. Bruccoleri, and J. L. Junkins, “The Pyramid Star Identification Technique”, Navigation 51, 171–183 (2004). DOI: https://doi.org/10.1002/j.2161-4296.2004.tb00349.x
-
[27]
Geometric voting algorithm for star trackers
M. Kolomenkin, S. Pollak, I. Shimshoni, and M. Lindenbaum, “Geometric voting algorithm for star trackers”, IEEE Trans. Aerosp. Electron. Syst. 44, 441–456 (2008). DOI: https://doi.org/10.1109/TAES.2008.4560198 CFW-GMN 13
-
[28]
Star pattern identification technique by modified grid algorithm
H. Lee and H. Bang, “Star pattern identification technique by modified grid algorithm”, IEEE Trans. Aerosp. Electron. Syst. 43, 1112–1116 (2007). DOI: https://doi.org/10.1109/TAES.2007.4383600
-
[29]
Full-sky autonomous star identification based on radial and cyclic features of star pattern
G. Zhang, X. Wei, and J. Jiang, “Full-sky autonomous star identification based on radial and cyclic features of star pattern”, Image Vis. Comput. 26, 891–897 (2008). DOI: https://doi.org/10.1016/j.imavis.2007.10.006
-
[30]
Spherical Polar Pattern Matching for Star Identification
J. Fu, L. Lin, and Q. Li, “Spherical Polar Pattern Matching for Star Identification”, Sensors 25, 4201 (2025). DOI: https://doi.org/10.3390/s25134201
-
[31]
The Graph Neural Network Model
F. Scarselli, M. Gori, A. C. Tsoi, M. Hagenbuchner, and G. Monfardini, “The Graph Neural Network Model”, IEEE Trans. Neural Netw. 20, 61–80 (2009). DOI: https://doi.org/10.1109/TNN.2008.2005605
-
[32]
Graph Matching Networks for Learning the Similarity of Graph Structured Objects
Y . Li, C. Gu, T. Dullien, O. Vinyals, and P. Kohli, “Graph Matching Networks for Learning the Similarity of Graph Structured Objects”, inProc. 36th Int. Conf. Mach. Learn., Proc. Mach. Learn. Res. 97, 3835–3845 (2019). https://proceedings.mlr.press/v97/li19d.html
2019
-
[33]
Neural Message Passing for Quantum Chemistry
J. Gilmer, S. S. Schoenholz, P. F. Riley, O. Vinyals, and G. E. Dahl, “Neural Message Passing for Quantum Chemistry”, inProc. 34th Int. Conf. Mach. Learn., Proc. Mach. Learn. Res. 70, 1263–1272 (2017). https://proceedings.mlr.press/v70/gilmer17a.html
2017
-
[34]
Semi-Supervised Classification with Graph Convolutional Networks
T. N. Kipf and M. Welling, “Semi-Supervised Classification with Graph Convolutional Networks”, inInt. Conf. Learn. Represent.(2017). https://openreview.net/forum?id=SJU4ayYgl
2017
-
[35]
Dynamic Edge- Conditioned Filters in Convolutional Neural Net- works on Graphs
M. Simonovsky and N. Komodakis, “Dynamic Edge- Conditioned Filters in Convolutional Neural Net- works on Graphs”, inProc. IEEE Conf. Com- put. Vis. Pattern Recognit.3693–3702 (2017). DOI: https://doi.org/10.1109/CVPR.2017.11
-
[36]
Graph Attention Net- works
P. Veli ˇckovi´c, G. Cucurull, A. Casanova, A. Romero, P. Li `o, and Y . Bengio, “Graph Attention Net- works”, inInt. Conf. Learn. Represent.(2018). https://openreview.net/forum?id=rJXMpikCZ
2018
-
[38]
Center -based 3D Object Detection and Tracking,
J. Sun, Z. Shen, Y . Wang, H. Bao, and X. Zhou, “LoFTR: Detector-Free Local Feature Matching with Transformers”, inProc. IEEE/CVF Conf. Com- put. Vis. Pattern Recognit.8922–8931 (2021). DOI: https://doi.org/10.1109/CVPR46437.2021.00881
-
[39]
Effective Approaches to Attention-based Neural Ma- chine Translation
M.-T. Luong, H. Pham, and C. D. Manning, “Effective Approaches to Attention-based Neural Ma- chine Translation”, inProc. 2015 Conf. Empirical Methods Nat. Lang. Process.1412–1421 (2015). DOI: https://doi.org/10.18653/v1/D15-1166
-
[40]
Attention Is All You Need
A. Vaswani, N. Shazeer, N. Parmar, J. Uszkoreit, L. Jones, A. N. Gomez, L. Kaiser, and I. Polosukhin, “Attention Is All You Need”, inAdv. Neural Inf. Process. Syst.30, 5998–6008 (2017). https://papers.nips.cc/paper/7181-attention-is-all-you- need
2017
-
[41]
Y . Han, Y . Huang, H. Dong, F. Chen, F. Zeng, Z. Peng, Q. Zhu, and G. Liu, “Continuous gradient fusion class activation mapping: segmentation of laser-induced damage on large-aperture optics in dark-field images”, High Power Laser Sci. Eng. 12, e4 (2024). DOI: https://doi.org/10.1017/hpl.2023.85
-
[42]
Random Features for Large- Scale Kernel Machines
A. Rahimi and B. Recht, “Random Features for Large- Scale Kernel Machines”, inAdv. Neural Inf. Pro- cess. Syst.20 (2007). https://papers.nips.cc/paper/3182- random-features-for-large-scale-kernel-machines
2007
-
[43]
M. Tancik, P. P. Srinivasan, B. Mildenhall, S. Fridovich- Keil, N. Raghavan, U. Singhal, R. Ramamoorthi, J. T. Barron, and R. Ng, “Fourier Features Let Networks Learn High Frequency Functions in Low Dimensional Domains”, inAdv. Neural Inf. Process. Syst.33 (2020). arXiv: https://arxiv.org/abs/2006.10739
-
[44]
Sinkhorn Distances: Lightspeed Computation of Optimal Transport
M. Cuturi, “Sinkhorn Distances: Lightspeed Computation of Optimal Transport”, inAdv. Neural Inf. Process. Syst.26, 2292–2300 (2013). https://papers.nips.cc/paper/4927-sinkhorn-distances- lightspeed-computation-of-optimal-transport
2013
-
[45]
P.-E. Sarlin, D. DeTone, T. Malisiewicz, and A. Rabinovich, “SuperGlue: Learning Feature Matching with Graph Neural Networks”, inProc. IEEE/CVF Conf. Comput. Vis. Pattern Recognit.4938–4947 (2020). DOI: https://doi.org/10.1109/CVPR42600.2020.00499
-
[46]
Best-Buddies Similarity— Robust Template Matching Using Mutual Nearest Neighbors
S. Oron, T. Dekel, T. Xue, W. T. Freeman, and S. Avidan, “Best-Buddies Similarity— Robust Template Matching Using Mutual Nearest Neighbors”, IEEE Trans. Pattern Anal. Mach. Intell. 40, 1799–1813 (2018). DOI: https://doi.org/10.1109/TPAMI.2017.2737424
-
[47]
On the Variance of the Adaptive Learning Rate and Beyond
L. Liu, H. Jiang, P. He, W. Chen, X. Liu, J. Gao, and J. Han, “On the Variance of the Adaptive Learning Rate and Beyond”, inInt. Conf. Learn. Represent.(2020). DOI: https://doi.org/10.48550/arXiv.1908.03265
-
[48]
M. A. Fischler and R. C. Bolles, “Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartog- raphy”, Commun. ACM 24, 381–395 (1981). DOI: https://doi.org/10.1145/358669.358692
-
[49]
Method for matching online and offline dark- field images of damage sites on large-aperture optical elements
Y . Han, F. Chen, F. Zeng, C. Lu, Z. Peng, and G. Liu, “Method for matching online and offline dark- field images of damage sites on large-aperture optical elements”, Chinese patent CN113237888B (June 14, 2022)
2022
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.