Lateral String Stability for Vehicle Platoons
Pith reviewed 2026-06-30 06:42 UTC · model grok-4.3
The pith
Onboard sensing cannot guarantee attenuation of path-tracking errors in vehicle platoons, but V2V communication enables it.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The paper defines lateral string stability from an arc-length Eulerian viewpoint and proves that an onboard-sensing-only controller cannot guarantee attenuation of path-relative tracking errors, imposing a fundamental safety limitation, whereas a novel V2V-based learn-from-predecessor controller enables true attenuation of those errors.
What carries the argument
The arc-length (Eulerian) viewpoint that permits consistent comparison of path-relative tracking errors across vehicles on identical road geometry.
If this is right
- Platoons limited to onboard sensing encounter an inherent bound on lateral safety that cannot be removed by controller tuning alone.
- V2V communication is required to achieve lateral string stability and the associated safety gains in platooning.
- Path-tracking error buildup becomes preventable in dense CAV formations once predecessor information is shared.
- The safety benefits claimed for platooning depend on communication for lateral as well as longitudinal control.
Where Pith is reading between the lines
- Mandates for CAV platooning may need to require V2V capability to realize lateral safety.
- The framework could be extended to mixed platoons containing both communicating and non-communicating vehicles.
- Integration with longitudinal string stability analyses would yield a combined lateral-longitudinal stability criterion.
Load-bearing premise
All vehicles follow identical road geometry and path-relative tracking errors can be compared consistently in an Eulerian arc-length frame without extra disturbances from map-free navigation.
What would settle it
A platoon experiment or simulation in which an onboard-sensing controller produces measurable attenuation of path-tracking errors from lead to tail vehicle, or in which the V2V controller fails to produce such attenuation.
Figures





read the original abstract
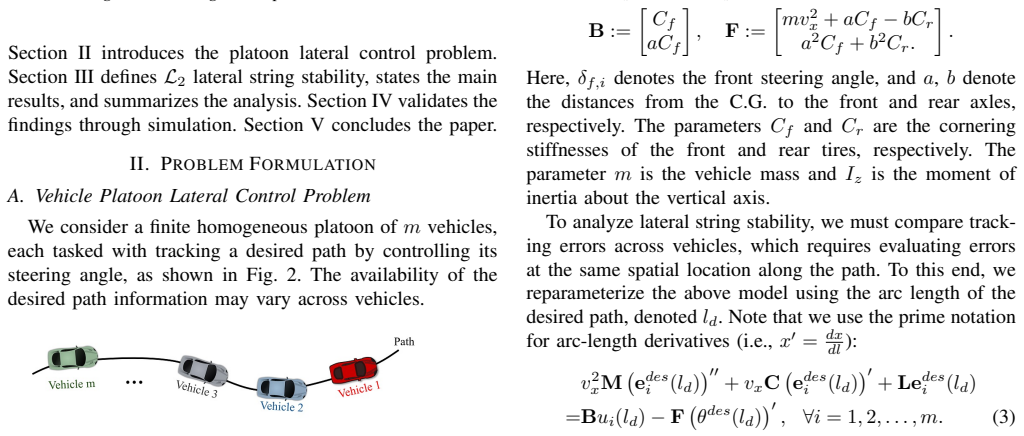
Connected and automated vehicle (CAV) platooning promises gains in energy efficiency and traffic throughput and, most critically, in safety. These safety benefits hinge on string stability, which determines how disturbances propagate along a platoon. While longitudinal string stability is well studied, lateral string stability, which governs the propagation of path-tracking errors that can lead to unsafe deviations from the intended path, remains underexplored. Its importance is increasing as autonomous vehicles rely more heavily on onboard sensing and map-free navigation, where sensor occlusion and dense formations amplify safety risks. This paper presents a new framework for lateral string stability that directly addresses safety-critical path-relative tracking errors and enables consistent comparison across vehicles following the same road geometry. Central to this framework is an arc-length (Eulerian) viewpoint, a departure from traditional analyses, that clarifies how tracking errors at a given point on the path propagate from one vehicle to the next. A formal definition of lateral string stability is introduced along with two control strategies: an onboard-sensing-only controller and a novel learn-from-predecessor approach utilizing vehicle-to-vehicle (V2V) communication. We show that onboard sensing alone cannot guarantee attenuation of path-tracking errors, imposing a fundamental safety limitation, whereas V2V communication enables true error attenuation.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces a new framework for lateral string stability in vehicle platoons based on an arc-length (Eulerian) viewpoint that enables consistent comparison of path-relative tracking errors across vehicles following the same road geometry. It defines lateral string stability formally and analyzes two strategies: an onboard-sensing-only controller and a novel V2V learn-from-predecessor controller. The central claims are that onboard sensing alone cannot guarantee attenuation of path-tracking errors (imposing a fundamental safety limitation) while V2V communication enables true error attenuation.
Significance. If the central claims hold under the stated modeling assumptions, the work identifies a safety-critical limitation of onboard-only sensing for lateral stability in platoons and shows how V2V can overcome it. This is relevant to CAV safety in dense formations and map-free navigation scenarios. The framework's departure from traditional analyses is a strength, though no machine-checked proofs or reproducible code are mentioned.
major comments (2)
- [Abstract] Abstract: the claim that onboard sensing alone cannot guarantee attenuation of path-tracking errors is derived under the assumption that all vehicles follow identical road geometry and that errors are defined relative to one common path in the shared Eulerian arc-length frame. This shared-geometry premise is load-bearing for the impossibility result, yet the abstract and framework description do not address how independent path estimation under map-free navigation (explicitly referenced as a motivating scenario) would introduce additional relative disturbances such as curvature mismatch.
- [Abstract] Abstract: the formal definition of lateral string stability and the demonstration of attenuation (or lack thereof) for the two controllers are stated as results, but the abstract provides no indication of the underlying derivations, stability criteria, or error-propagation analysis that would allow assessment of whether the onboard-only limitation is shown rigorously or is an artifact of the shared-frame modeling choice.
minor comments (1)
- The abstract refers to 'two control strategies' and a 'novel learn-from-predecessor approach' without naming the specific control laws, gains, or learning mechanism, which reduces clarity on how the V2V benefit is realized.
Simulated Author's Rebuttal
We thank the referee for the constructive comments. We address each major comment below and will revise the abstract accordingly to clarify assumptions and the nature of the results.
read point-by-point responses
-
Referee: [Abstract] Abstract: the claim that onboard sensing alone cannot guarantee attenuation of path-tracking errors is derived under the assumption that all vehicles follow identical road geometry and that errors are defined relative to one common path in the shared Eulerian arc-length frame. This shared-geometry premise is load-bearing for the impossibility result, yet the abstract and framework description do not address how independent path estimation under map-free navigation (explicitly referenced as a motivating scenario) would introduce additional relative disturbances such as curvature mismatch.
Authors: The Eulerian arc-length framework is formulated under the premise that vehicles follow the same road geometry, enabling consistent comparison of path-relative errors. The impossibility result for onboard sensing is derived specifically within this shared-frame setting and demonstrates a fundamental limitation on error attenuation even when path references are identical. We agree that fully independent path estimation in map-free navigation could introduce unmodeled disturbances such as curvature mismatch; the current analysis does not capture those effects. We will revise the abstract to explicitly state the shared-geometry assumption and note that additional disturbances may arise outside this modeling choice. revision: yes
-
Referee: [Abstract] Abstract: the formal definition of lateral string stability and the demonstration of attenuation (or lack thereof) for the two controllers are stated as results, but the abstract provides no indication of the underlying derivations, stability criteria, or error-propagation analysis that would allow assessment of whether the onboard-only limitation is shown rigorously or is an artifact of the shared-frame modeling choice.
Authors: The abstract summarizes the principal findings at a high level. The manuscript contains the formal definition of lateral string stability in the Eulerian frame, the associated stability criteria based on attenuation of path errors along the platoon, and the explicit error-propagation analysis showing that the onboard controller cannot guarantee attenuation while the V2V controller can. These derivations are not artifacts of the frame but follow directly from the vehicle dynamics expressed in arc-length coordinates. We will revise the abstract to briefly reference the Eulerian stability analysis and error-propagation results. revision: yes
Circularity Check
No significant circularity; derivation is self-contained
full rationale
The paper introduces an arc-length Eulerian framework, defines lateral string stability, and derives the onboard-sensing limitation and V2V attenuation result directly from the error-propagation equations under the stated shared-geometry assumption. No load-bearing step reduces by construction to a fitted parameter, self-definition, or self-citation chain; the central claims follow from the new viewpoint and control laws without renaming known results or smuggling ansatzes. The analysis remains independent of its inputs.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption All vehicles in the platoon follow the same road geometry allowing consistent path-relative error comparison.
Reference graph
Works this paper leans on
-
[1]
Decentralized control of high-speed vehicular strings,
K. Chu, “Decentralized control of high-speed vehicular strings,” Transportation science, vol. 8, no. 4, pp. 361–384, 1974
1974
-
[2]
Swaroop,String stability of interconnected systems: An application to platooning in automated highway systems
D. Swaroop,String stability of interconnected systems: An application to platooning in automated highway systems. University of California, Berkeley, 1994
1994
-
[3]
String stability of interconnected systems,
D. Swaroop and J. K. Hedrick, “String stability of interconnected systems,”IEEE transactions on automatic control, vol. 41, no. 3, pp. 349–357, 2002
2002
-
[4]
Constant spacing strategies for platooning in automated high- way systems,
——, “Constant spacing strategies for platooning in automated high- way systems,” 1999
1999
-
[5]
Disturbance propagation in vehicle strings,
P. Seiler, A. Pant, and K. Hedrick, “Disturbance propagation in vehicle strings,”IEEE Transactions on automatic control, vol. 49, no. 10, pp. 1835–1842, 2004
2004
-
[6]
Physically analyzable ai-based nonlinear platoon dynamics modeling during traffic oscillation: A koopman approach,
K. Tian, H. Shi, Y . Zhou, and S. Li, “Physically analyzable ai-based nonlinear platoon dynamics modeling during traffic oscillation: A koopman approach,”IEEE Transactions on Intelligent Transportation Systems, 2025
2025
-
[7]
Sequencing-enabled hierarchical cooperative cav on-ramp merging control with enhanced stability and feasibility,
S. Li, Y . Zhou, X. Ye, J. Jiang, and M. Wang, “Sequencing-enabled hierarchical cooperative cav on-ramp merging control with enhanced stability and feasibility,”IEEE Transactions on Intelligent Vehicles, 2024
2024
-
[8]
Nonlinear oscillatory response of automated vehicle car-following: Theoretical analysis with traffic state and control input limits,
S. Li and Y . Zhou, “Nonlinear oscillatory response of automated vehicle car-following: Theoretical analysis with traffic state and control input limits,”Transportation Research Part B: Methodological, vol. 201, p. 103315, 2025
2025
-
[9]
String stability and a delay-based spacing policy for vehicle platoons subject to disturbances,
B. Besselink and K. H. Johansson, “String stability and a delay-based spacing policy for vehicle platoons subject to disturbances,”IEEE Transactions on Automatic Control, vol. 62, no. 9, pp. 4376–4391, 2017
2017
-
[10]
On the steering of automated vehicles: Theory and experiment,
R. Fenton, G. Melocik, and K. Olson, “On the steering of automated vehicles: Theory and experiment,”IEEE Transactions on Automatic Control, vol. 21, no. 3, pp. 306–315, 1976
1976
-
[11]
Autonomous vehicle navigation in rural environments without detailed prior maps,
T. Ort, L. Paull, and D. Rus, “Autonomous vehicle navigation in rural environments without detailed prior maps,” in2018 IEEE international conference on robotics and automation (ICRA). IEEE, 2018, pp. 2040–2047
2018
-
[12]
Safe occlusion-aware autonomous driving via game-theoretic active perception,
Z. Zhang and J. F. Fisac, “Safe occlusion-aware autonomous driving via game-theoretic active perception,” in17th Robotics: Science and Systems, RSS 2021. MIT Press Journals, 2021
2021
-
[13]
String- stable automated steering in cooperative driving applications,
O. Hassanain, M. Alirezaei, J. Ploeg, and N. v. de Wouw, “String- stable automated steering in cooperative driving applications,”Vehicle System Dynamics, vol. 58, no. 5, pp. 826–842, 2020
2020
-
[14]
Robust lateral control of a convoy of autonomous & connected vehicles with limited preview,
M. Liu, N. Somisetty, S. Rathinam, and S. Darbha, “Robust lateral control of a convoy of autonomous & connected vehicles with limited preview,”arXiv preprint arXiv:2011.03587, 2020
-
[15]
Lateral string stability of vehicle platoons,
J. Alleleijn, H. Nijmeijer, S. ¨Onc¨u, and J. Ploeg, “Lateral string stability of vehicle platoons,” 2014
2014
-
[16]
Lateral string stability in autonomous & connected vehicle platoons,
N. Somisetty and S. Darbha, “Lateral string stability in autonomous & connected vehicle platoons,” in2024 IEEE International Conference on Vehicular Electronics and Safety (ICVES). IEEE, 2024, pp. 1–6
2024
-
[17]
Lateral control of an autonomous and connected following vehicle with limited preview information,
M. Liu, K. Chour, S. Rathinam, and S. Darbha, “Lateral control of an autonomous and connected following vehicle with limited preview information,”IEEE Transactions on Intelligent Vehicles, vol. 6, no. 3, pp. 406–418, 2020
2020
-
[18]
Vehicle lateral control for highway automation,
H. Peng and M. Tomizuka, “Vehicle lateral control for highway automation,” in1990 American Control Conference. IEEE, 1990, pp. 788–794
1990
-
[19]
S. P. Bhattacharyya, A. Datta, and L. H. Keel,Linear control theory: structure, robustness, and optimization. CRC press, 2018
2018
-
[20]
R. A. Horn and C. R. Johnson,Matrix analysis. Cambridge university press, 2012
2012
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.