Information-Aided DVL Calibration
Pith reviewed 2026-07-01 05:24 UTC · model grok-4.3
The pith
Information-aided calibration improves DVL accuracy up to 35 percent without GNSS signals.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
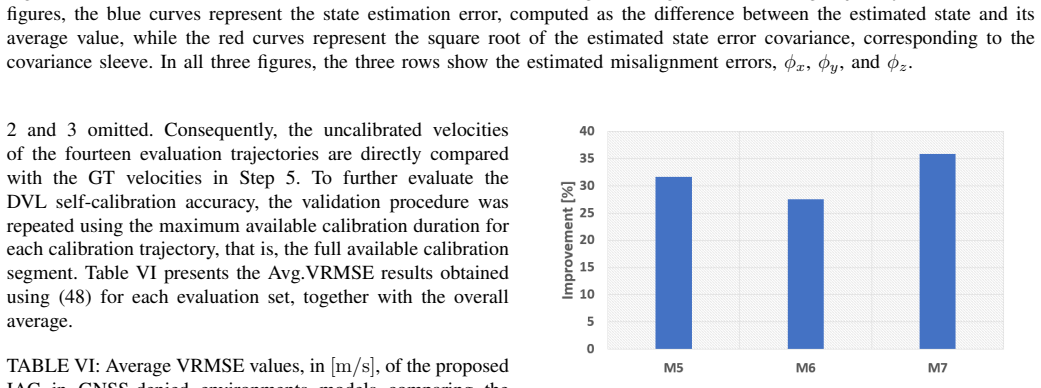
The central claim is that IAC models, built on Kalman filter frameworks, achieve up to 20 percent average improvement in calibration accuracy in GNSS-enabled settings and up to 35 percent improvement in velocity vector estimation during GNSS-free DVL self-calibration, using real-world AUV datasets.
What carries the argument
Information-aided calibration (IAC) models that incorporate auxiliary information to constrain DVL error parameters.
If this is right
- Improved navigation solutions for AUVs in surface and underwater operations.
- Reduced navigation drift during missions.
- Enhanced mission reliability through better velocity measurements.
- Possibility of self-calibration without external references.
Where Pith is reading between the lines
- Similar information-aided approaches might apply to other navigation sensors in GNSS-denied scenarios.
- Long-term AUV operations could benefit from periodic self-calibration using IAC.
- Integration with other data sources like inertial sensors could further enhance the method.
Load-bearing premise
Auxiliary information sources or models exist that can meaningfully constrain the DVL error parameters without GNSS reference measurements.
What would settle it
Demonstrating no improvement or degradation in calibration accuracy when applying IAC in environments where the auxiliary sources do not correlate with DVL errors.
Figures




read the original abstract
The Doppler velocity log (DVL) velocity measurements are critical to the accuracy of autonomous underwater vehicle (AUV) navigation solutions and, consequently, to mission success. To ensure accurate measurements, the DVL is commonly calibrated before mission start while the AUV sails on the water surface, receiving global navigation satellite system (GNSS) signals that provide accurate reference measurements. Conventionally, Kalman filter-based approaches are employed during calibration to estimate the scale factor and misalignment errors. However, in certain environments, GNSS signals may be unavailable, rendering conventional calibration impossible and forcing the use of uncalibrated DVL measurements, which degrades navigation performance. To address this limitation, this work proposes information-aided calibration (IAC) with two main contributions: first, improving the accuracy of conventional Kalman filter-based calibration in GNSS-enabled environments, and second, enabling GNSS-free DVL self-calibration. Using real-world AUV datasets, the proposed IAC models achieve up to a 20% average improvement in GNSS-enabled environments and up to a 35% improvement in velocity vector estimation during GNSS-free DVL self-calibration. Overall, the proposed approach improves navigation accuracy, reduces navigation drift, and consequently enhances mission reliability.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes an information-aided calibration (IAC) approach for Doppler velocity log (DVL) sensors on autonomous underwater vehicles (AUVs). It extends conventional Kalman filter-based calibration to improve accuracy when GNSS is available and to enable self-calibration when GNSS is unavailable by incorporating auxiliary information sources. On real-world AUV datasets, the IAC models are reported to achieve up to 20% average improvement in GNSS-enabled environments and up to 35% improvement in velocity vector estimation during GNSS-free self-calibration, with the overall goal of reducing navigation drift.
Significance. If the quantitative improvements are supported by independent references and detailed validation, the work addresses a practical gap in AUV navigation by enabling reliable DVL calibration in GNSS-denied settings, which could improve mission reliability in challenging underwater environments.
major comments (1)
- [Abstract] Abstract: the central claim of 'up to 35% improvement in velocity vector estimation during GNSS-free DVL self-calibration' on real datasets requires an independent reference velocity for the percentage to be computed. The manuscript must explicitly state what reference is used for this quantification and confirm that it is independent of the auxiliary information sources employed by the IAC model; without this, the reported improvement does not demonstrate performance under truly reference-free conditions.
minor comments (1)
- [Abstract] The abstract provides no equations, error bars, dataset descriptions, or validation procedure details, which hinders assessment of the quantitative claims even at a high level.
Simulated Author's Rebuttal
We thank the referee for the detailed review and for highlighting the need for explicit clarification regarding the reference velocity in our evaluation. We address the major comment below and will revise the manuscript accordingly.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim of 'up to 35% improvement in velocity vector estimation during GNSS-free DVL self-calibration' on real datasets requires an independent reference velocity for the percentage to be computed. The manuscript must explicitly state what reference is used for this quantification and confirm that it is independent of the auxiliary information sources employed by the IAC model; without this, the reported improvement does not demonstrate performance under truly reference-free conditions.
Authors: We agree that the abstract (and corresponding evaluation sections) should explicitly identify the reference velocity used to compute the reported percentage improvements. In the revised manuscript, we will add a clear statement that the reference is the velocity output from a high-accuracy integrated INS/GNSS system available during the surface segments of the real AUV datasets; this reference is independent of the auxiliary information sources (e.g., vehicle dynamics models, pressure sensor data, or other non-DVL measurements) incorporated by the IAC model during GNSS-free self-calibration. The 35% figure therefore reflects improvement relative to an external ground-truth velocity that is not used by the IAC calibration process itself. revision: yes
Circularity Check
No circularity: empirical improvements reported without self-referential fitting or definitional loops
full rationale
The abstract and description present IAC as an extension of Kalman-filter calibration using auxiliary information sources, with performance quantified on real-world AUV datasets. No equations, parameter-fitting procedures, or derivation steps are supplied that would allow a reduction to inputs by construction. Reported percentage improvements are external empirical outcomes rather than renamed fitted quantities. No self-citation chains or uniqueness theorems are invoked in the given text. The derivation chain, to the extent visible, remains self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Automatic tracking method for submarine cables and pipelines of AUV based on side scan sonar,
H. Feng, J. Yu, Y . Huang, J. Cui, J. Qiao, Z. Wang, Z. Xie, and K. Ren, “Automatic tracking method for submarine cables and pipelines of AUV based on side scan sonar,”Ocean Engineering, vol. 280, p. 114689, 2023
2023
-
[2]
Monitoring of benthic reference sites: using an au- tonomous underwater vehicle,
S. B. Williams, O. R. Pizarro, M. V . Jakuba, C. R. Johnson, N. S. Barrett, R. C. Babcock, G. A. Kendrick, P. D. Steinberg, A. J. Heyward, P. J. Dohertyet al., “Monitoring of benthic reference sites: using an au- tonomous underwater vehicle,”IEEE Robotics & Au- tomation Magazine, vol. 19, no. 1, pp. 73–84, 2012
2012
-
[3]
Scientific challenges and present capabilities in underwater robotic vehicle design and navigation for oceanographic exploration under-ice,
L. D. Barker, M. V . Jakuba, A. D. Bowen, C. R. German, T. Maksym, L. Mayer, A. Boetius, P. Dutrieux, and L. L. Whitcomb, “Scientific challenges and present capabilities in underwater robotic vehicle design and navigation for oceanographic exploration under-ice,”Remote Sensing, vol. 12, no. 16, p. 2588, 2020
2020
-
[4]
Autonomous Under- water Vehicles (AUVs): Their past, present and future contributions to the advancement of marine geoscience,
R. B. Wynn, V . A. Huvenne, T. P. Le Bas, B. J. Murton, D. P. Connelly, B. J. Bett, H. A. Ruhl, K. J. Morris, J. Peakall, D. R. Parsonset al., “Autonomous Under- water Vehicles (AUVs): Their past, present and future contributions to the advancement of marine geoscience,” Marine geology, vol. 352, pp. 451–468, 2014
2014
-
[5]
Visual inspection of hydroelectric dams using an autonomous underwater vehicle,
P. Ridao, M. Carreras, D. Ribas, and R. Garcia, “Visual inspection of hydroelectric dams using an autonomous underwater vehicle,”Journal of Field Robotics, vol. 27, no. 6, pp. 759–778, 2010
2010
-
[6]
A positioning error correction method for dead-reckoning navigation of underwater vehicles,
P. Liu, B. Wang, Z. Li, Z. Zhu, and J. Liang, “A positioning error correction method for dead-reckoning navigation of underwater vehicles,”IEEE Transactions on Instrumentation and Measurement, 2025
2025
-
[7]
Physics-guided adaptive UKF for robust AUV integrated navigation under degraded un- derwater observations,
Y . Miao, X. Liu, Y . Sun, X. Liu, C. Shen, C. Wang, J. Tang, and J. Liu, “Physics-guided adaptive UKF for robust AUV integrated navigation under degraded un- derwater observations,”Ocean Engineering, vol. 362, p. 126542, 2026
2026
-
[8]
The EKF-based SINS/DVL integrated nav- igation for AUV on lie group under hovring condition,
G. Sheng, X. Liu, Y . Zhang, Q. Shao, H. Xu, X. Cheng, and X. Yuan, “The EKF-based SINS/DVL integrated nav- igation for AUV on lie group under hovring condition,” Ocean Engineering, vol. 325, p. 120742, 2025
2025
-
[9]
A novel SINS/DVL tightly integrated navigation method for complex environment,
D. Wang, X. Xu, Y . Yao, T. Zhang, and Y . Zhu, “A novel SINS/DVL tightly integrated navigation method for complex environment,”IEEE Transactions on Instrumen- tation and Measurement, vol. 69, no. 7, pp. 5183–5196, 2019
2019
-
[10]
Seamless Underwater Naviga- tion with Limited Doppler Velocity Log Measurements,
N. Cohen and I. Klein, “Seamless Underwater Naviga- tion with Limited Doppler Velocity Log Measurements,” IEEE Transactions on Intelligent Vehicles, pp. 1–12, 2024
2024
-
[11]
An on-line full-parameters calibration method for SINS/DVL integrated navigation system,
L. Luo, Y . Huang, G. Wang, Y . Zhang, and L. Tang, “An on-line full-parameters calibration method for SINS/DVL integrated navigation system,”IEEE Sensors Journal, vol. 23, no. 24, pp. 30 927–30 939, 2023
2023
-
[12]
An INS/DVL integrated navigation filtering method against complex underwater environment,
L. Qian, F. Qin, A. Li, K. Li, and J. Zhu, “An INS/DVL integrated navigation filtering method against complex underwater environment,”Ocean Engineering, vol. 278, p. 114398, 2023
2023
-
[13]
Kalman and extended kalman filters: Concept, derivation and properties,
M. I. Ribeiro, “Kalman and extended kalman filters: Concept, derivation and properties,”Institute for Systems and Robotics, vol. 43, no. 46, pp. 3736–3741, 2004
2004
-
[14]
Adaptive Kalman-informed transformer,
N. Cohen and I. Klein, “Adaptive Kalman-informed transformer,”Engineering Applications of Artificial In- telligence, vol. 146, p. 110221, 2025
2025
-
[15]
The unscented Kalman filter for nonlinear estimation,
E. A. Wan and R. Van Der Merwe, “The unscented Kalman filter for nonlinear estimation,” inProceedings 11 of the IEEE 2000 adaptive systems for signal process- ing, communications, and control symposium (Cat. No. 00EX373). Ieee, 2000, pp. 153–158
2000
-
[16]
Adaptive neural unscented Kalman filter,
A. Levy and I. Klein, “Adaptive neural unscented Kalman filter,”IEEE Transactions on Intelligent Vehicles, 2026
2026
-
[17]
Neural aided adaptive innovation-based invariant Kalman filter,
B. Diker and I. Klein, “Neural Aided Adaptive Innovation-Based Invariant Kalman Filter,”arXiv preprint arXiv:2603.26709, 2026
-
[18]
Correction of DVL error caused by seafloor gradient,
B. Braginsky, A. Baruch, and H. Guterman, “Correction of DVL error caused by seafloor gradient,”IEEE Sensors Journal, vol. 20, no. 19, pp. 11 652–11 659, 2020
2020
-
[19]
A novel DVL aided inertial navigation strategy for long- endurance robust positioning of AUVs,
S. Pan, X. Xu, Y . Yao, L. Zhang, and M. Xia, “A novel DVL aided inertial navigation strategy for long- endurance robust positioning of AUVs,”IEEE Transac- tions on Intelligent Vehicles, 2024
2024
-
[20]
Research on fast calibra- tion and moving base alignment of SINS/DVL-integrated navigation system,
Z. Ning, X. Pan, and W. Wu, “Research on fast calibra- tion and moving base alignment of SINS/DVL-integrated navigation system,”IEEE Sensors Journal, vol. 25, no. 4, pp. 6035–6047, 2023
2023
-
[21]
A quasi- Newton quaternions calibration method for DVL error aided GNSS,
D. Wang, X. Xu, Y . Yang, and T. Zhang, “A quasi- Newton quaternions calibration method for DVL error aided GNSS,”IEEE transactions on vehicular technol- ogy, vol. 70, no. 3, pp. 2465–2477, 2021
2021
-
[22]
A calibration method of DVL in integrated navigation system based on particle swarm optimization,
D. Li, J. Xu, B. Zhu, and H. He, “A calibration method of DVL in integrated navigation system based on particle swarm optimization,”Measurement, vol. 187, p. 110325, 2022
2022
-
[23]
A GNSS Aided Cali- bration Method for DVL Error Based on the Optimal- REQUEST,
S. Liu, T. Zhang, and Y . Zhu, “A GNSS Aided Cali- bration Method for DVL Error Based on the Optimal- REQUEST,”IEEE Sensors Journal, vol. 22, no. 22, pp. 21 899–21 910, 2022
2022
-
[24]
A novel GPS-aided robust calibration method for SINS/DVL inte- grated navigation system,
S. Li, Y . Zhao, Y . Chen, Y . Ben, and Z. Wang, “A novel GPS-aided robust calibration method for SINS/DVL inte- grated navigation system,”IEEE Sensors Journal, 2025
2025
-
[25]
A novel calibra- tion method of SINS/DVL integration navigation system based on quaternion,
B. Xu, L. Wang, S. Li, and J. Zhang, “A novel calibra- tion method of SINS/DVL integration navigation system based on quaternion,”IEEE Sensors Journal, vol. 20, no. 16, pp. 9567–9580, 2020
2020
-
[26]
A novel DVL calibration method based on robust invariant extended Kalman filter,
B. Xu and Y . Guo, “A novel DVL calibration method based on robust invariant extended Kalman filter,”IEEE Transactions on Vehicular Technology, vol. 71, no. 9, pp. 9422–9434, 2022
2022
-
[27]
Online calibration method of DVL error based on improved integrated navigation model,
D. Wang, B. Wang, H. Huang, and Y . Yao, “Online calibration method of DVL error based on improved integrated navigation model,”IEEE Sensors Journal, vol. 22, no. 21, pp. 21 082–21 092, 2022
2022
-
[28]
GNSS-aided installation error compensation for DVL/INS integrated navigation system using error- state Kalman filter,
J. Huang, H. Li, Z. Liu, Z. Wang, Y . Wang, and Y . Chen, “GNSS-aided installation error compensation for DVL/INS integrated navigation system using error- state Kalman filter,”Measurement, vol. 242, p. 116224, 2025
2025
-
[29]
Novel algorithm for the calibration of DVL in under- water integrated navigation system,
H. Zhang, C. Li, T. Zhang, G. Wang, and D. Wang, “Novel algorithm for the calibration of DVL in under- water integrated navigation system,”Ocean Engineering, vol. 353, p. 124676, 2026
2026
-
[30]
A model-free calibration method of inertial navigation system and Doppler sensors,
B. Wang, J. Liu, Z. Deng, and M. Fu, “A model-free calibration method of inertial navigation system and Doppler sensors,”IEEE Sensors Journal, vol. 21, no. 2, pp. 2219–2229, 2020
2020
-
[31]
DCNet: A data-driven framework for DVL calibration,
Z. Yampolsky and I. Klein, “DCNet: A data-driven framework for DVL calibration,”Applied Ocean Re- search, vol. 158, p. 104525, 2025
2025
-
[32]
Information-aided inertial navigation: A review,
D. Engelsman and I. Klein, “Information-aided inertial navigation: A review,”IEEE Transactions on Instrumen- tation and Measurement, vol. 72, pp. 1–18, 2023
2023
-
[33]
Principles of GNSS,
P. D. Groves, “Principles of GNSS,”Inertial, and Multi- sensor Integrated Navigation Systems, vol. 521, 2008
2008
-
[34]
An IMM-aided ZUPT methodology for an INS/DVL integrated navigation sys- tem,
Y . Yao, X. Xu, and X. Xu, “An IMM-aided ZUPT methodology for an INS/DVL integrated navigation sys- tem,”Sensors, vol. 17, no. 9, p. 2030, 2017
2030
-
[35]
A least squares estimate of satellite attitude,
G. Wahba, “A least squares estimate of satellite attitude,” SIAM review, vol. 7, no. 3, pp. 409–409, 1965
1965
-
[36]
Least-squares estimation of transforma- tion parameters between two point patterns,
S. Umeyama, “Least-squares estimation of transforma- tion parameters between two point patterns,”IEEE Trans- actions on pattern analysis and machine intelligence, vol. 13, no. 4, pp. 376–380, 2002
2002
-
[37]
Estimating 3-D rigid body transformations: a comparison of four ma- jor algorithms,
D. W. Eggert, A. Lorusso, and R. B. Fisher, “Estimating 3-D rigid body transformations: a comparison of four ma- jor algorithms,”Machine vision and applications, vol. 9, no. 5, pp. 272–290, 1997
1997
-
[38]
ResAlignNet: A data-driven approach for INS/DVL alignment,
G. Damari and I. Klein, “ResAlignNet: A data-driven approach for INS/DVL alignment,”Ocean Engineering, vol. 356, p. 125277, 2026
2026
-
[39]
Titterton and J
D. Titterton and J. L. Weston,Strapdown inertial navi- gation technology. IET, 2004, vol. 17
2004
-
[40]
Bar-Shalom, X
Y . Bar-Shalom, X. R. Li, and T. Kirubarajan,Estimation with applications to tracking and navigation: theory algorithms and software. John Wiley & Sons, 2001
2001
-
[41]
Fundamentals of kalman filtering: A practical approach,
Z. Paul and M. Howard, “Fundamentals of kalman filtering: A practical approach,”Virginia, Published by the American Institute of Aeronautics and Astronautics, p. 80, 2005
2005
-
[42]
[Online]
Snapir auv. [Online]. Available: https://marsci.haifa.ac. il/en/ocean-instruments/
-
[43]
BeamsNet: A data-driven ap- proach enhancing Doppler velocity log measurements for autonomous underwater vehicle navigation,
N. Cohen and I. Klein, “BeamsNet: A data-driven ap- proach enhancing Doppler velocity log measurements for autonomous underwater vehicle navigation,”Engineer- ing Applications of Artificial Intelligence, vol. 114, p. 105216, 2022
2022
-
[44]
[Online]
Waterlink a50 dvl. [Online]. Available: https://www. waterlinked.com/shop/dvl-a50-1248
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.