DL-SLAM: Enabling High-Fidelity Gaussian Splatting SLAM in Dynamic Environments based on Dual-Level Probability
Pith reviewed 2026-07-03 12:10 UTC · model grok-4.3
The pith
DL-SLAM lifts pixel semantic-geometric probabilities to object level for pruning dynamic Gaussians, yielding up to 13% better tracking and artifact-free static maps.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
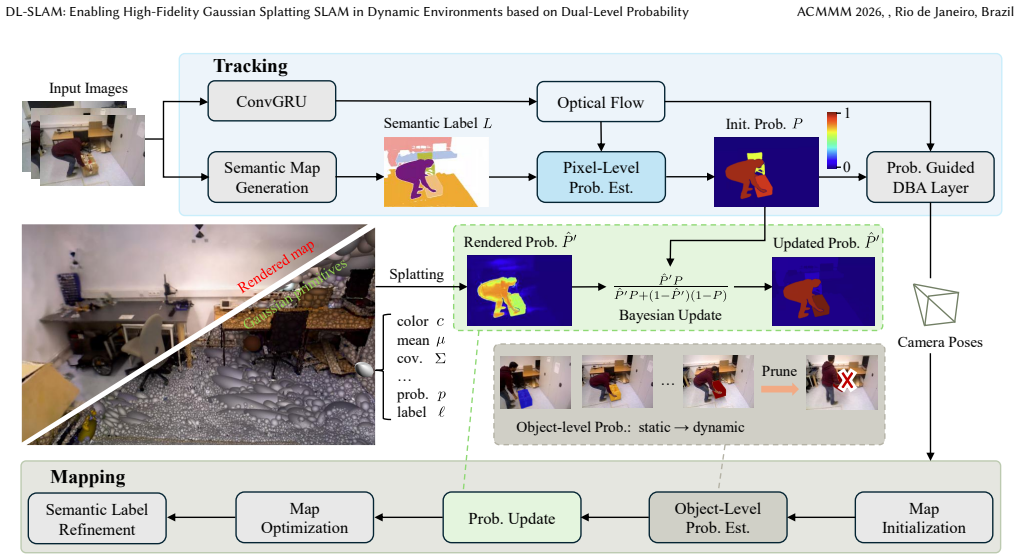
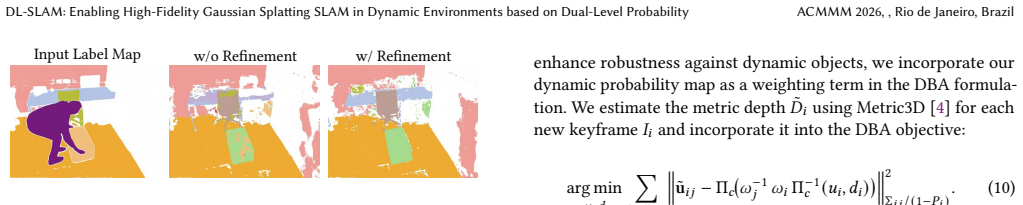
DL-SLAM computes dynamic probability maps by combining semantic and geometric information. These pixel-level probabilities are lifted to 3D and aggregated to derive an object-level dynamic probability for each instance. Object-level probability enables the categorical pruning of dynamic Gaussians, resulting in an artifact-free static map. The static map, in turn, provides a geometrically consistent guidance to refine the pixel-wise probabilities, enhancing their reliability.
What carries the argument
Dual-level probabilistic framework that aggregates pixel-wise semantic-geometric probabilities into per-instance object-level dynamic probabilities for categorical Gaussian pruning.
If this is right
- Tracking accuracy improves by up to 13% over prior Gaussian SLAM methods in dynamic environments.
- Transiently static objects contribute geometric constraints without leaving persistent artifacts in the final map.
- Semantic information resolves boundary ambiguity that pure geometric uncertainty maps cannot handle.
- Iterative refinement between the static map and pixel probabilities increases overall map fidelity.
- The resulting maps carry explicit semantic labels while remaining dense and geometrically consistent.
Where Pith is reading between the lines
- The same lifting-and-pruning pattern could be applied to other dense representations such as neural radiance fields or voxel grids in dynamic settings.
- Object-level probabilities may reduce dependence on hand-labeled dynamic class lists by learning instance motion statistics on the fly.
- Feedback from the pruned map to pixel probabilities suggests a route toward self-supervised improvement of semantic segmentation within the SLAM loop.
Load-bearing premise
Aggregating pixel-wise semantic-geometric probabilities to the object level will correctly distinguish dynamic instances from transiently static ones without false inclusions that pollute the map or false exclusions that weaken pose constraints.
What would settle it
A sequence of frames containing objects that move briefly then stop, where the object-level aggregation either includes moving Gaussians in the static map or removes useful static structure, producing measurable increases in absolute trajectory error or visible reconstruction artifacts.
Figures


read the original abstract
Recent advances in 3D Gaussian Splatting (3DGS) have enabled significant progress in dense dynamic Simultaneous Localization And Mapping (SLAM). Prevailing methods typically discard predefined dynamic objects, ignoring that transiently static objects offer valuable geometric constraints for pose estimation. A recent work attempts to leverage this potential by employing per-pixel uncertainty maps to quantify the magnitude of motion. While this approach enables transiently static objects to enhance pose estimation, it erroneously integrates these objects into the static map, resulting in persistent artifacts. Moreover, its reliance on purely geometric information leads to ambiguous object boundaries in the uncertainty maps. To overcome these limitations, we present DL-SLAM, a monocular Gaussian Splatting SLAM system built upon a novel dual-level probabilistic framework. Our method computes dynamic probability maps by combining semantic and geometric information. These pixel-level probabilities are lifted to 3D and aggregated to derive an object-level dynamic probability for each instance. Object-level probability enables the categorical pruning of dynamic Gaussians, resulting in an artifact-free static map. The static map, in turn, provides a geometrically consistent guidance to refine the pixel-wise probabilities, enhancing their reliability. Experimental results demonstrate that DL-SLAM outperforms existing approaches, improving tracking accuracy by up to 13\% while generating high-fidelity semantic maps.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes DL-SLAM, a monocular 3D Gaussian Splatting SLAM system for dynamic environments. It introduces a dual-level probabilistic framework that computes pixel-level dynamic probabilities by combining semantic and geometric cues, lifts these to 3D, aggregates them per instance to obtain object-level dynamic probabilities, and uses these for categorical pruning of dynamic Gaussians to produce an artifact-free static map. The static map then provides feedback to refine the pixel-level probabilities. Experiments are claimed to show up to 13% improvement in tracking accuracy over existing methods along with high-fidelity semantic maps.
Significance. If the object-level aggregation step reliably separates dynamic instances from transiently static ones without introducing false inclusions or exclusions, the dual-level framework would represent a meaningful advance in dense dynamic SLAM by enabling the use of geometric constraints from semi-static objects while avoiding persistent artifacts in 3DGS maps. The bidirectional refinement between map and probabilities is a constructive design element.
major comments (1)
- [Abstract] Abstract (and method description): The central claim that lifting pixel-wise semantic-geometric probabilities to 3D and aggregating per instance produces a reliable object-level dynamic probability for categorical pruning is load-bearing for both the artifact-free map and the reported tracking gains, yet the manuscript provides no robustness analysis or verification of this aggregation operator against noisy instance segmentation, partial observations, or depth errors.
minor comments (1)
- [Abstract] The abstract states performance gains of 'up to 13%' without specifying the exact baselines, datasets, or error metrics used for this figure.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive review. The comment on the robustness of the object-level aggregation step is well-taken and identifies a genuine gap in the current manuscript. We address it directly below and will revise the paper accordingly.
read point-by-point responses
-
Referee: [Abstract] Abstract (and method description): The central claim that lifting pixel-wise semantic-geometric probabilities to 3D and aggregating per instance produces a reliable object-level dynamic probability for categorical pruning is load-bearing for both the artifact-free map and the reported tracking gains, yet the manuscript provides no robustness analysis or verification of this aggregation operator against noisy instance segmentation, partial observations, or depth errors.
Authors: We agree that the manuscript currently lacks an explicit robustness analysis of the aggregation operator. While the experimental results on multiple dynamic sequences demonstrate consistent improvements in tracking accuracy and map quality, these do not isolate the effects of noisy instance segmentation, partial observations, or depth errors on the per-instance aggregation step. In the revised manuscript we will add a dedicated robustness subsection (including both quantitative metrics and qualitative examples) that perturbs instance masks, simulates partial views, and injects depth noise to measure the stability of the resulting object-level probabilities and the downstream categorical pruning. This analysis will be referenced from both the abstract and the method description. revision: yes
Circularity Check
No circularity detected; derivation remains self-contained
full rationale
The provided abstract and description outline a dual-level probabilistic framework that computes pixel-wise dynamic probabilities from external semantic and geometric inputs, lifts them to 3D, aggregates per instance to obtain object-level probabilities for pruning, and uses the resulting static map for refinement feedback. No equations, parameter fits, predictions, or self-citations are shown that reduce any claim to its own inputs by construction. The central steps are presented as computed from independent cues rather than defined in terms of the outputs they produce, making the derivation self-contained against external benchmarks with no load-bearing circular reductions.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Fácil, Javier Civera, and José Neira
Berta Bescós, José M. Fácil, Javier Civera, and José Neira. 2018. DynaSLAM: Tracking, Mapping, and Inpainting in Dynamic Scenes.IEEE Robotics Autom. Lett.3, 4 (2018), 4076–4083
2018
-
[2]
Yingchun Fan, Qichi Zhang, Yuliang Tang, Shaofeng Liu, and Hong Han. 2022. Blitz-SLAM: A semantic SLAM in dynamic environments.Pattern Recognit.121 (2022), 108225
2022
-
[3]
Seongbo Ha, Jiung Yeon, and Hyeonwoo Yu. 2024. RGBD GS-ICP SLAM. In Computer Vision - ECCV 2024 - 18th European Conference, Vol. 15094. Springer, 180–197
2024
-
[4]
Mu Hu, Wei Yin, Chi Zhang, Zhipeng Cai, Xiaoxiao Long, Hao Chen, Kaixuan Wang, Gang Yu, Chunhua Shen, and Shaojie Shen. 2024. Metric3D v2: A Versatile Monocular Geometric Foundation Model for Zero-Shot Metric Depth and Surface Normal Estimation.IEEE Trans. Pattern Anal. Mach. Intell.46, 12 (2024), 10579– 10596
2024
-
[5]
Xinggang Hu, Yunzhou Zhang, Zhenzhong Cao, Rong Ma, Yanmin Wu, Zhiqiang Deng, and Wenkai Sun. 2022. CFP-SLAM: A Real-time Visual SLAM Based on Coarse-to-Fine Probability in Dynamic Environments. InIEEE/RSJ International Conference on Intelligent Robots and Systems. IEEE, 4399–4406
2022
-
[6]
Yiming Ji, Yang Liu, Guanghu Xie, Boyu Ma, and Zongwu Xie an Hong Liu. 2024. NEDS-SLAM: A Neural Explicit Dense Semantic SLAM Framework Using 3D Gaussian Splatting.IEEE Robotics Autom. Lett.9, 10 (2024), 8778–8785
2024
-
[7]
Haochen Jiang, Yueming Xu, Kejie Li, Jianfeng Feng, and Li Zhang. 2024. RoDyn- SLAM: Robust Dynamic Dense RGB-D SLAM With Neural Radiance Fields.IEEE Robotics Autom. Lett.9, 9 (2024), 7509–7516
2024
-
[8]
Scherer, Deva Ramanan, and Jonathon Luiten
Nikhil Varma Keetha, Jay Karhade, Krishna Murthy Jatavallabhula, Gengshan Yang, Sebastian A. Scherer, Deva Ramanan, and Jonathon Luiten. 2024. SplaTAM: Splat, Track & Map 3D Gaussians for Dense RGB-D SLAM. InIEEE/CVF Conference on Computer Vision and Pattern Recognition. IEEE, 21357–21366
2024
-
[9]
Bernhard Kerbl, Georgios Kopanas, Thomas Leimkühler, and George Drettakis
-
[10]
Graph.42, 4 (2023), 139:1–139:14
3D Gaussian Splatting for Real-Time Radiance Field Rendering.ACM Trans. Graph.42, 4 (2023), 139:1–139:14
2023
-
[11]
Linfei Li, Lin Zhang, Zhong Wang, and Ying Shen. 2024. GS 3LAM: Gaussian Semantic Splatting SLAM. InProceedings of the 32nd ACM International Conference on Multimedia. ACM, 3019–3027
2024
-
[12]
Mingrui Li, Dong Li, Sijia Hu, Kangxu Wang, Zhenjun Zhao, and Hongyu Wang
-
[13]
InProceedings of the 33rd ACM International Conference on Multimedia
SLAM-X:Generalizable Dynamic Removal for NeRF and Gaussian Splatting SLAM. InProceedings of the 33rd ACM International Conference on Multimedia. ACM, 1132–1140
-
[14]
Mingrui Li, Shuhong Liu, Heng Zhou, Guohao Zhu, Na Cheng, Tianchen Deng, and Hongyu Wang. 2024. SGS-SLAM: Semantic Gaussian Splatting for Neu- ral Dense SLAM. InComputer Vision - ECCV 2024 - 18th European Conference. Springer, 163–179
2024
-
[15]
Haosong Liu, Long Wang, Haiyong Luo, Fang Zhao, Runze Chen, Yushi Chen, Mingyu Xiao, Jiaquan Yan, and Dan Luo. 2025. SDD-SLAM: Semantic-Driven Dynamic SLAM With Gaussian Splatting.IEEE Robotics Autom. Lett.10, 6 (2025), 5721–5728
2025
-
[16]
Shilong Liu, Zhaoyang Zeng, Tianhe Ren, Feng Li, Hao Zhang, Jie Yang, Qing Jiang, Chunyuan Li, Jianwei Yang, Hang Su, Jun Zhu, and Lei Zhang. 2024. Grounding DINO: Marrying DINO with Grounded Pre-training for Open-Set Object Detection. InComputer Vision - ECCV 2024 - 18th European Conference, Vol. 15105. Springer, 38–55
2024
-
[17]
Hidenobu Matsuki, Riku Murai, Paul H. J. Kelly, and Andrew J. Davison. 2024. Gaussian Splatting SLAM. InIEEE/CVF Conference on Computer Vision and Pattern Recognition. IEEE, 18039–18048
2024
-
[18]
Srinivasan, Matthew Tancik, Jonathan T
Ben Mildenhall, Pratul P. Srinivasan, Matthew Tancik, Jonathan T. Barron, Ravi Ramamoorthi, and Ren Ng. 2022. NeRF: representing scenes as neural radiance fields for view synthesis.Commun. ACM65, 1 (2022), 99–106
2022
-
[19]
Raul Mur-Artal and Juan D. Tardós. 2017. ORB-SLAM2: An Open-Source SLAM System for Monocular, Stereo, and RGB-D Cameras.IEEE Trans. Robotics33, 5 (2017), 1255–1262
2017
-
[20]
Emanuele Palazzolo, Jens Behley, Philipp Lottes, Philippe Giguère, and Cyrill Stachniss. 2019. ReFusion: 3D Reconstruction in Dynamic Environments for RGB-D Cameras Exploiting Residuals. InIEEE/RSJ International Conference on Intelligent Robots and Systems. IEEE, 7855–7862
2019
-
[21]
Alec Radford, Jong Wook Kim, Chris Hallacy, Aditya Ramesh, Gabriel Goh, Sandhini Agarwal, Girish Sastry, Amanda Askell, Pamela Mishkin, Jack Clark, Gretchen Krueger, and Ilya Sutskever. 2021. Learning Transferable Visual Models From Natural Language Supervision. InProceedings of the 38th International Conference on Machine Learning, Vol. 139. PMLR, 8748–8763
2021
-
[22]
Nicolas Schischka, Hannah Schieber, Mert Asim Karaoglu, Melih Görgülü, Flo- rian Grötzner, Alexander Ladikos, Nassir Navab, Daniel Roth, and Benjamin Busam. 2025. DynaMoN: Motion-Aware Fast and Robust Camera Localization for Dynamic Neural Radiance Fields.IEEE Robotics Autom. Lett.10, 1 (2025), 548–555
2025
-
[23]
Jürgen Sturm, Nikolas Engelhard, Felix Endres, Wolfram Burgard, and Daniel Cremers. 2012. A benchmark for the evaluation of RGB-D SLAM systems. In IEEE/RSJ International Conference on Intelligent Robots and Systems. IEEE, 573– 580
2012
-
[24]
Zachary Teed and Jia Deng. 2021. DROID-SLAM: Deep Visual SLAM for Monocu- lar, Stereo, and RGB-D Cameras. InAnnual Conference on Neural Information Pro- cessing Systems 2021, Marc’Aurelio Ranzato, Alina Beygelzimer, Yann N. Dauphin, Percy Liang, and Jennifer Wortman Vaughan (Eds.). 16558–16569
2021
-
[25]
Hengyi Wang, Jingwen Wang, and Lourdes Agapito. 2023. Co-SLAM: Joint Coordinate and Sparse Parametric Encodings for Neural Real-Time SLAM. In IEEE/CVF Conference on Computer Vision and Pattern Recognition. IEEE, 13293– 13302
2023
-
[26]
Haitao Wang, Sijia Wen, and Bo Guo. 2025. Polarimetric Monocular Gaussian Splatting SLAM for Dense Surface Reconstruction. InProceedings of the 33rd ACM International Conference on Multimedia. ACM, 7519–7528
2025
-
[27]
Bovik, Hamid R
Zhou Wang, Alan C. Bovik, Hamid R. Sheikh, and Eero P. Simoncelli. 2004. Image quality assessment: from error visibility to structural similarity.IEEE Trans. Image Process.13, 4 (2004), 600–612
2004
-
[28]
Yueming Xu, Haochen Jiang, Zhongyang Xiao, Jianfeng Feng, and Li Zhang
-
[29]
InAdvances in Neural Information Processing Systems 38: Annual Conference on Neural Information Processing Systems 2024
DG-SLAM: Robust Dynamic Gaussian Splatting SLAM with Hybrid Pose Optimization. InAdvances in Neural Information Processing Systems 38: Annual Conference on Neural Information Processing Systems 2024
2024
-
[30]
Ziheng Xu, Jianwei Niu, Qingfeng Li, Tao Ren, and Chen Chen. 2024. NID-SLAM: Neural Implicit Representation-based RGB-D SLAM In Dynamic Environments. InIEEE International Conference on Multimedia and Expo. IEEE, 1–6
2024
-
[31]
Dianyi Yang, Yu Gao, Xihan Wang, Yufeng Yue, Yi Yang, and Mengyin Fu. 2025. OpenGS-SLAM: Open-Set Dense Semantic SLAM with 3D Gaussian Splatting for Object-Level Scene Understanding. InIEEE International Conference on Robotics and Automation. IEEE, 8486–8492
2025
-
[32]
Chao Yu, Zuxin Liu, Xin-Jun Liu, Fugui Xie, Yi Yang, Qi Wei, and Fei Qiao. 2018. DS-SLAM: A Semantic Visual SLAM towards Dynamic Environments. InIEEE/RSJ International Conference on Intelligent Robots and Systems. IEEE, 1168–1174
2018
-
[33]
Xun Yuan and Song Chen. 2020. SaD-SLAM: A Visual SLAM Based on Semantic and Depth Information. InIEEE/RSJ International Conference on Intelligent Robots and Systems. IEEE, 4930–4935
2020
- [34]
-
[35]
Efros, Eli Shechtman, and Oliver Wang
Richard Zhang, Phillip Isola, Alexei A. Efros, Eli Shechtman, and Oliver Wang
-
[36]
In 2018 IEEE Conference on Computer Vision and Pattern Recognition
The Unreasonable Effectiveness of Deep Features as a Perceptual Metric. In 2018 IEEE Conference on Computer Vision and Pattern Recognition. IEEE, 586–595
2018
-
[37]
Youcai Zhang, Xinyu Huang, Jinyu Ma, Zhaoyang Li, Zhaochuan Luo, Yanchun Xie, Yuzhuo Qin, Tong Luo, Yaqian Li, Shilong Liu, Yandong Guo, and Lei Zhang
-
[38]
InIEEE/CVF Confer- ence on Computer Vision and Pattern Recognition
Recognize Anything: A Strong Image Tagging Model. InIEEE/CVF Confer- ence on Computer Vision and Pattern Recognition. IEEE, 1724–1732
-
[39]
Jianhao Zheng, Zihan Zhu, Valentin Bieri, Marc Pollefeys, Songyou Peng, and Iro Armeni. 2025. WildGS-SLAM: Monocular Gaussian Splatting SLAM in Dy- namic Environments. InIEEE/CVF Conference on Computer Vision and Pattern Recognition. IEEE, 11461–11471
2025
-
[40]
Siting Zhu, Renjie Qin, Guangming Wang, and Jiuming Liu andHesheng Wang
- [41]
-
[42]
Oswald, and Marc Pollefeys
Zihan Zhu, Songyou Peng, Viktor Larsson, Weiwei Xu, Hujun Bao, Zhaopeng Cui, Martin R. Oswald, and Marc Pollefeys. 2022. NICE-SLAM: Neural Implicit Scalable Encoding for SLAM. InIEEE/CVF Conference on Computer Vision and Pattern Recognition. IEEE, 12776–12786
2022
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.