A characteristic function framework for chance constraint programming in stochastic model predictive control
Pith reviewed 2026-05-20 09:21 UTC · model grok-4.3
The pith
Chance constraints in stochastic model predictive control can be computed and optimized using the characteristic function of arbitrary non-Gaussian disturbances.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
By inverting the characteristic function of the disturbance distribution using Gauss-Kronrod quadrature, the probability in a chance constraint and its gradient can be computed numerically for non-Gaussian disturbances, enabling direct solution of the resulting optimization problem within a modeling toolbox.
What carries the argument
Numerical inversion of the characteristic function via Gauss-Kronrod quadrature to compute chance constraint probabilities and gradients.
If this is right
- Chance constraints become tractable for a wide range of non-Gaussian disturbance distributions without requiring Gaussian approximations.
- The framework integrates into existing optimization tools like YALMIP, simplifying implementation for users.
- Both single-component and mixture distribution models can be handled with the same approach.
- Gradient information from the inversion supports gradient-based optimization solvers in stochastic MPC.
Where Pith is reading between the lines
- The same inversion technique could apply to chance-constrained problems in other domains such as portfolio optimization or reliability engineering.
- Accuracy and speed might improve further with distribution-specific inversion formulas or parallel quadrature implementations.
- The framework's performance on high-dimensional state spaces would reveal whether vectorization alone suffices for real-time MPC applications.
Load-bearing premise
The characteristic function of the disturbance is known or easily evaluable and the numerical inversion via Gauss-Kronrod quadrature delivers sufficient accuracy and gradient information for the subsequent optimization to remain reliable.
What would settle it
Apply the method to a disturbance distribution with a known closed-form chance constraint probability, such as a Gaussian, and compare the computed value against the analytical result to within a small error tolerance.
Figures
read the original abstract
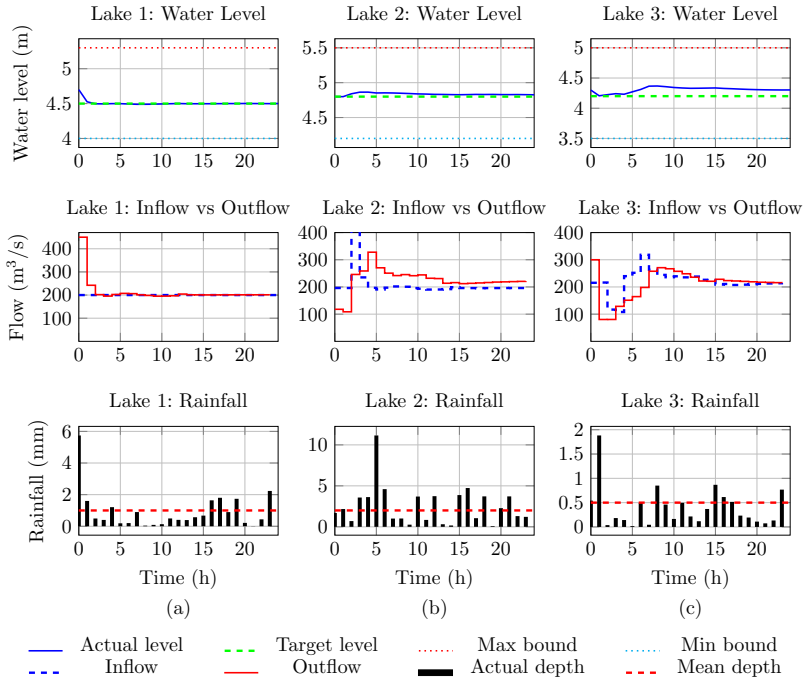
The computation of chance constraints in stochastic model predictive control is often numerically challenging due to the non-Gaussian nature of the disturbances. To overcome this problem, we propose an optimization computational framework applicable to non-Gaussian disturbances. This framework employs a numerical inversion method, utilizing the characteristic function of the disturbance distribution to compute the probability in the chance constraint as well as its gradient. To improve efficiency, it vectorizes integral points and reuses intermediate computations in Gauss-Kronrod quadrature. The framework is implemented within the YALMIP toolbox to perform chance constraint calculations for arbitrary non-Gaussian disturbances, applicable to both single-component distributions and mixture models. It allows the user to simply specify a distribution type and its parameters for the disturbance and directly compute the probability and its gradient to solve the optimization problem. The method is validated through a numerical example of a stochastic model predictive control application.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a framework for computing chance constraints in stochastic model predictive control (SMPC) under non-Gaussian disturbances. It uses the characteristic function of the disturbance (or mixture) together with numerical inversion via Gauss-Kronrod quadrature to evaluate both the probability appearing in the chance constraint and its gradient. Efficiency is improved by vectorizing quadrature points and reusing intermediate results. The method is implemented inside YALMIP so that the user need only specify a distribution type and parameters; the resulting nonlinear program is then solved directly. Validation consists of a single numerical SMPC example.
Significance. If the quadrature inversion supplies probabilities and gradients whose accuracy is sufficient for the subsequent nonlinear program to enforce the original probabilistic constraint, the framework would remove the need for Gaussian approximations or scenario-based relaxations in SMPC. The YALMIP integration and explicit support for mixture models constitute practical contributions that could be adopted by control engineers working with non-Gaussian sensor noise or process disturbances. The vectorization and reuse strategy addresses a recognized computational bottleneck.
major comments (2)
- [Numerical inversion procedure] Section describing the numerical inversion (around the Gauss-Kronrod implementation): no a-priori or a-posteriori error bounds are supplied for the quadrature approximation of the probability or its gradient. For mixture distributions the error is not necessarily uniform across components; without such bounds it is impossible to guarantee that the optimized trajectory satisfies the original chance constraint to the prescribed level.
- [Numerical example] Numerical example section: the reported closed-loop trajectories and constraint satisfaction are shown only for the proposed method; no Monte-Carlo reference or alternative inversion technique is used to quantify the quadrature error in the probability values that enter the optimizer. This omission leaves the central claim that the computed gradients are reliable for the nonlinear program unverified.
minor comments (2)
- The notation for the characteristic function and its inversion integral could be aligned more closely with standard probability texts to reduce ambiguity for readers outside the immediate sub-field.
- [Numerical example] Figure captions for the SMPC trajectories should explicitly state the disturbance distribution and the chance-constraint level used in each panel.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed comments. We address each major comment below and indicate the changes planned for the revised manuscript.
read point-by-point responses
-
Referee: Section describing the numerical inversion (around the Gauss-Kronrod implementation): no a-priori or a-posteriori error bounds are supplied for the quadrature approximation of the probability or its gradient. For mixture distributions the error is not necessarily uniform across components; without such bounds it is impossible to guarantee that the optimized trajectory satisfies the original chance constraint to the prescribed level.
Authors: We agree that the original manuscript does not supply explicit a-priori or a-posteriori error bounds on the quadrature approximation. The Gauss-Kronrod routine used does generate internal error estimates, yet these were neither reported nor employed to certify the chance-constraint values. For mixture distributions the error may indeed vary across components. In the revision we will add a dedicated subsection on numerical accuracy that (i) recalls known convergence results for characteristic-function inversion by quadrature, (ii) describes how the internal error estimate of the quadrature can be used as a practical a-posteriori check, and (iii) provides guidance on selecting the number of quadrature points to meet a user-specified tolerance. We will also note that, while these measures improve practical reliability, a strict theoretical guarantee that the optimized trajectory satisfies the original probabilistic constraint remains subject to both quadrature and NLP solver tolerances. revision: yes
-
Referee: Numerical example section: the reported closed-loop trajectories and constraint satisfaction are shown only for the proposed method; no Monte-Carlo reference or alternative inversion technique is used to quantify the quadrature error in the probability values that enter the optimizer. This omission leaves the central claim that the computed gradients are reliable for the nonlinear program unverified.
Authors: The numerical example illustrates closed-loop behavior under the proposed framework, but we concur that it does not independently verify the accuracy of the probability and gradient values supplied to the optimizer. In the revised manuscript we will augment the example with Monte-Carlo estimates (using a large number of samples drawn from the same disturbance distribution) of the empirical chance-constraint violation probabilities for the trajectories obtained by the optimizer. We will also report the discrepancy between the quadrature-evaluated probabilities and the Monte-Carlo estimates, thereby quantifying the quadrature error and supporting the claim that the gradients are sufficiently reliable for the nonlinear program. revision: yes
Circularity Check
No circularity: numerical inversion framework is a self-contained computational procedure
full rationale
The paper presents a direct numerical method that takes a known characteristic function of the disturbance (single or mixture) as input and applies Gauss-Kronrod quadrature to obtain the chance-constraint probability and its gradient for use inside YALMIP. No step reduces a claimed prediction or uniqueness result back to a fitted parameter or prior self-citation by construction. The derivation chain consists of standard Fourier inversion plus vectorized quadrature reuse; these operations are independent of the final MPC solution and do not presuppose the target probability values. The approach therefore remains externally falsifiable against Monte-Carlo benchmarks and does not rely on any load-bearing self-citation or ansatz smuggling.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
ϕ_λ(t;z) = ∏ ϕ_wj(g_j(z) t) ... mixture CF ϕ_wj = ∑ μ_r ϕ_j,r
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Qin, S. Joe and Badgwell, Thomas A. , title =. Control Engineering Practice , volume =
-
[2]
Halvgaard, Rasmus , title =
-
[3]
Robustness in Identification and Control , editor =
Bemporad, Alberto and Morari, Manfred , title =. Robustness in Identification and Control , editor =
-
[4]
Paulson, Joel A. and Buehler, Edward A. and Braatz, Richard D. and Mesbah, Ali , title =. International Journal of Control , volume =
-
[5]
Approximations of closed-loop minimax
L. Approximations of closed-loop minimax. Proceedings of the 42nd IEEE Conference on Decision and Control , volume =
-
[6]
Feedback Min-Max Model Predictive Control Based on a Quadratic Cost Function , booktitle =
Mu. Feedback Min-Max Model Predictive Control Based on a Quadratic Cost Function , booktitle =. 2006 , pages =
work page 2006
-
[7]
Oldewurtel, Frauke and Jones, Colin N. and Morari, Manfred , title =. Proceedings of the 47th IEEE Conference on Decision and Control , pages =
-
[8]
AIAA Guidance, Navigation, and Control Conference , address =
Blackmore, Lars and Ono, Masahiro , title =. AIAA Guidance, Navigation, and Control Conference , address =. 2009 , pages =
work page 2009
-
[9]
IEEE Transactions on Automatic Control , volume =
Tan, Yuan and Yang, Jun and Chen, Wen-Hua and Li, Shihua , title =. IEEE Transactions on Automatic Control , volume =
-
[10]
Schildbach, Georg and Fagiano, Lorenzo and Frei, Christoph and Morari, Manfred , title =. Automatica , volume =
-
[11]
de Melo, Maisa Kely and Cardoso, Rodrigo T. N. and Jesus, Tales A. , title =. 2021 IEEE Congress on Evolutionary Computation (CEC) , year =
work page 2021
-
[12]
Stable Distributions , booktitle =
Borak, Szymon and H. Stable Distributions , booktitle =
- [13]
- [14]
-
[15]
L. Proceedings of the 2004 IEEE International Symposium on Computer Aided Control Systems Design , pages =
work page 2004
-
[16]
Automatic Robust Convex Programming , journal =
L. Automatic Robust Convex Programming , journal =. 2012 , publisher =
work page 2012
-
[17]
Barbosa, Filipe Marques and L. Exponential Cone Approach to Joint Chance Constraints in Stochastic Model Predictive Control , journal =
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.