Invariant Stochastic Filtering on SE(3) for Inertial-Encoder State Estimation of Serial Rigid Manipulators
Pith reviewed 2026-07-02 21:46 UTC · model grok-4.3
The pith
An invariant extended Kalman filter on SE(3) gives serial manipulators autonomous error dynamics and modular mean-square stability.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The group-affine property of the manipulator kinematics on SE(3) renders the linearised error dynamics autonomous, allowing the Riccati equation to govern the true covariance; the resulting modular IEKF chain admits an exponential mean-square stability certificate obtained by chaining per-link Lyapunov bounds through the Adjoint operator norm.
What carries the argument
The group-affine property of the kinematic equations on SE(3), which makes the error dynamics state-independent and permits exact covariance propagation via the Riccati equation.
If this is right
- The computational cost grows linearly with the number of links.
- The stability certificate remains valid for manipulators of arbitrary length.
- The accelerometer measurement covariance scales exactly with the sample interval in the same manner as the discretised process noise.
- The gyroscope noise contribution to the dynamics vanishes at rest and increases with twist magnitude.
Where Pith is reading between the lines
- The same group-affine structure could be exploited for other rigid-body systems whose kinematics live on SE(3).
- If the group-affine property holds only approximately, the autonomy of the error dynamics would degrade gracefully rather than collapse.
- Real-time implementation on embedded hardware becomes feasible for long chains because each link's update depends on its predecessor only through a fixed matrix transformation.
Load-bearing premise
The kinematic equations of the serial rigid manipulator are group-affine when expressed on SE(3).
What would settle it
A numerical experiment in which the empirical error covariance of the filter diverges from the Riccati-predicted covariance for a long manipulator chain would falsify the autonomy claim.
Figures


read the original abstract
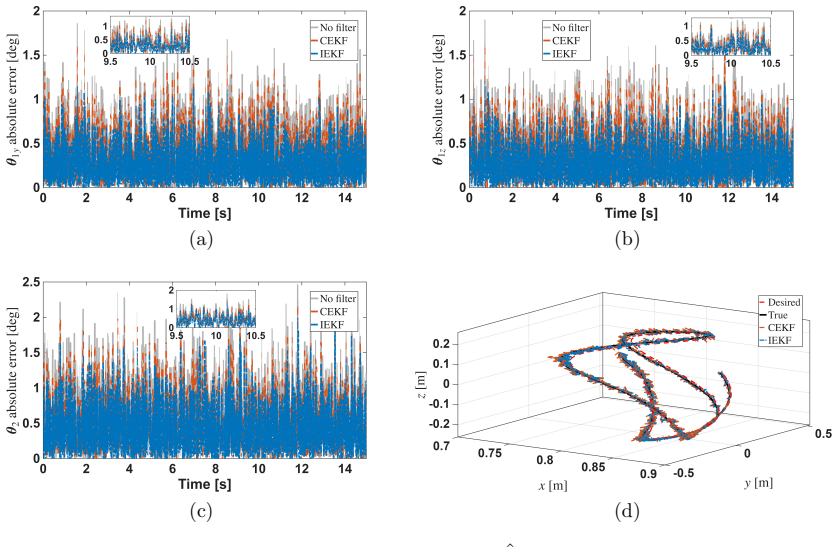
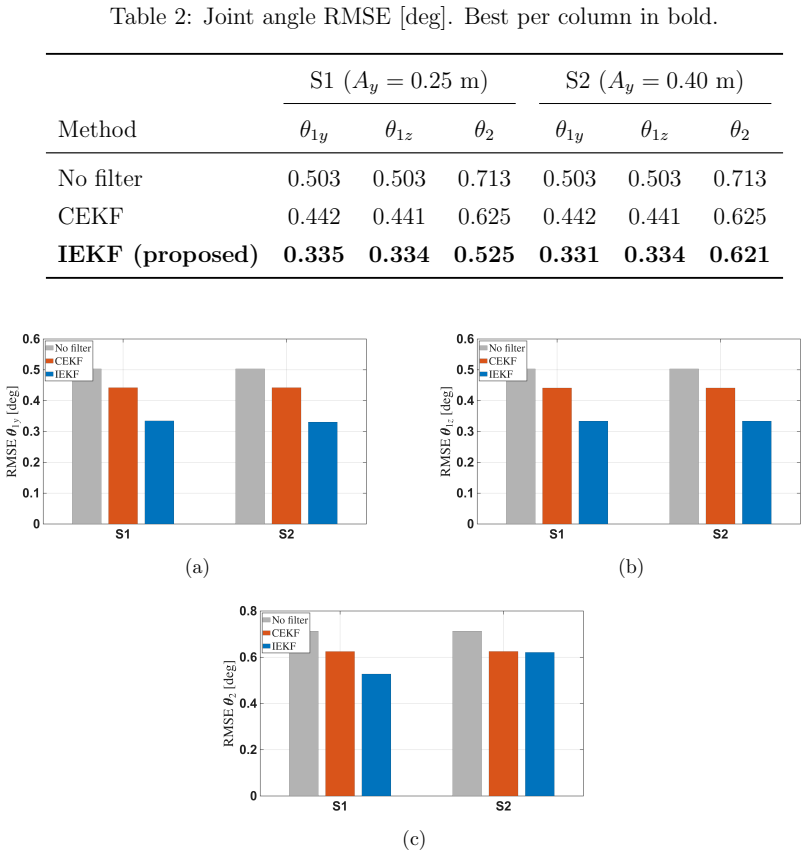
An invariant extended Kalman filter (IEKF) is developed for state estimation of serial rigid manipulators with an arbitrary number of links, formulated entirely within the Lie group SE(3). The group-affine property of the kinematic equations makes the linearised error dynamics autonomous, so the Riccati equation governs the true error covariance rather than a local approximation. A physically separated noise model treats gyroscope and accelerometer channels independently: the accelerometer provides translational twist via gravity-compensated integration, yielding a measurement covariance that scales with the sample interval in exact analogy with process noise discretisation; a state-dependent Coriolis noise term captures gyroscope noise propagating through the nonlinear dynamics, vanishing at rest and growing with twist magnitude. The filter is structured as a modular chain of per-link IEKFs in which the predicted covariance of each link depends on its predecessor only through the Adjoint-transformed posterior, giving linear computational cost in link count. Exponential ultimate boundedness in mean square is established via a Lie algebra Lyapunov function, with per-link bounds chained through the Adjoint operator norm to yield a stability certificate that is modular and scalable to arbitrary chain length. Numerical results validate the design.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper develops an invariant extended Kalman filter (IEKF) for inertial-encoder state estimation of serial rigid manipulators with arbitrary link count, formulated on the Lie group SE(3). It asserts that the kinematic equations possess the group-affine property, rendering the linearized error dynamics autonomous so that the Riccati equation tracks the true covariance rather than a local approximation. A separated noise model is introduced (accelerometer-derived translational twist with interval-scaled covariance; state-dependent Coriolis term for gyroscope propagation). The filter is realized as a modular chain of per-link IEKFs whose covariances propagate via Adjoint-transformed posteriors, yielding linear complexity. Exponential ultimate boundedness in mean square is proven via a Lie-algebra Lyapunov function whose per-link bounds are chained by Adjoint operator norms. Numerical results are cited for validation.
Significance. If the group-affine property is shown to hold exactly for the composite chain kinematics (including the adjoint coupling and Coriolis noise), the work would deliver a scalable, modular IEKF with explicit mean-square stability certificates and linear cost, which is a meaningful advance for Lie-group filtering in robotics. The modular chaining via Adjoint norms and the physically motivated noise separation are concrete strengths that could be adopted in manipulator applications.
major comments (1)
- [Abstract (group-affine property paragraph)] Abstract (group-affine property paragraph) and the kinematic model section: the claim that the full kinematic equations (accelerometer integration, gyroscope propagation, and state-dependent Coriolis noise) remain group-affine on the product of SE(3) copies is load-bearing for autonomy of the error dynamics and for the Riccati equation governing true covariance. For a serial chain each link velocity depends on the preceding pose through the adjoint, and the Coriolis term is explicitly state-dependent; an explicit derivation confirming that the composite vector field is still group-affine (i.e., the error dynamics are state-independent) is required, otherwise the autonomy and the subsequent Lyapunov chaining argument do not apply to the implemented filter.
minor comments (1)
- The abstract states that 'numerical results validate the design' but supplies no information on the manipulator configuration, sensor noise levels, comparison filters, or quantitative metrics; adding these details in the results section would improve reproducibility and clarity.
Simulated Author's Rebuttal
We thank the referee for the careful and constructive review. The single major comment is addressed below; we will revise the manuscript to incorporate the requested explicit derivation.
read point-by-point responses
-
Referee: [Abstract (group-affine property paragraph)] Abstract (group-affine property paragraph) and the kinematic model section: the claim that the full kinematic equations (accelerometer integration, gyroscope propagation, and state-dependent Coriolis noise) remain group-affine on the product of SE(3) copies is load-bearing for autonomy of the error dynamics and for the Riccati equation governing true covariance. For a serial chain each link velocity depends on the preceding pose through the adjoint, and the Coriolis term is explicitly state-dependent; an explicit derivation confirming that the composite vector field is still group-affine (i.e., the error dynamics are state-independent) is required, otherwise the autonomy and the subsequent Lyapunov chaining argument do not apply to the implemented filter.
Authors: We agree that an explicit derivation of the group-affine property for the composite kinematics on SE(3)^n is necessary. In the revised manuscript we will add a dedicated subsection in the kinematic model section that derives the vector field step by step. The deterministic kinematics are shown to satisfy the group-affine condition on the product Lie group, with adjoint couplings between consecutive links absorbed into the group action; the state-dependent Coriolis contribution is treated exclusively as multiplicative process noise and does not enter the deterministic vector field. This structure keeps the linearized error dynamics autonomous, so the Riccati equation tracks the true covariance and the subsequent Lyapunov chaining argument continues to apply. revision: yes
Circularity Check
No circularity: derivation rests on stated group-affine kinematics and independent Lyapunov analysis.
full rationale
The paper states the group-affine property of the kinematic equations as an input property of serial rigid manipulators on SE(3), then derives autonomous error dynamics and Riccati covariance from it. Stability follows from a Lie-algebra Lyapunov function with Adjoint-norm chaining; neither step is defined in terms of the output filter nor obtained by fitting parameters to the target covariance. No self-citation chain or ansatz smuggling appears in the abstract or described derivation. The central claims therefore remain independent of the results they produce.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption The kinematic equations of the serial rigid manipulator are group-affine on SE(3).
- domain assumption Gyroscope and accelerometer noise can be treated as physically separated channels with the stated covariance scaling and state-dependent Coriolis term.
Reference graph
Works this paper leans on
-
[1]
Estimation with Applications to Tracking and Navigation: Theory, Algorithms and Software. Wiley-Interscience. doi:10.1002/0471221279. Barrau, A., Bonnabel, S.,
-
[2]
IEEE Transactions on Automatic Control 62, 1797–1812
The invariant extended Kalman filter as a stable observer. IEEE Transactions on Automatic Control 62, 1797–1812. doi:10.1109/ TAC.2016.2594085. Barrau, A., Bonnabel, S.,
-
[3]
Journal of Mathematical Imaging and Vision 13, 205–228
The motor extended kalman filter: A geometric approach for rigid motion estimation. Journal of Mathematical Imaging and Vision 13, 205–228. doi:10.1023/A:1011293515286. Bhat, S.P., Bernstein, D.S.,
-
[4]
Systems & Control Letters 39, 63–70
A topological obstruction to continuous global stabilization of rotational motion and the unwinding phenomenon. Systems & Control Letters 39, 63–70. doi:10.1016/S0167-6911(99)00090-0. Chirikjian, G.S.,
-
[5]
IEEE Transactions on Robotics 33, 1–21
On-manifold preinte- gration for real-time visual-inertial odometry. IEEE Transactions on Robotics 33, 1–21. doi:10.1109/TRO.2016.2597321. Ge, Y., Delama, G., Scheiber, M., Fornasier, A., van Goor, P., Weiss, S., Mahony, R.,
-
[6]
doi:10.1016/j.conengprac.2025.106656. Hall, B.C.,
-
[7]
Lie Groups, Lie Algebras, and Representations: An Elementary Introduction. 2nd ed., Springer. doi:10.1007/978-3-319-13467-3. Hartley, R., Ghaffari, M., Eustice, R.M., Grizzle, J.W.,
-
[8]
The International Journal of Robotics Research 39, 402–430
Contact-aided in- variant extended Kalman filtering for robot state estimation. The International Journal of Robotics Research 39, 402–430. doi:10.1177/0278364919894385. Heo, S., Park, C.,
-
[9]
IEEE Sensors Journal 18, 3780–3788
Consistent EKF-based visual-inertial odometry on ma- trix Lie group. IEEE Sensors Journal 18, 3780–3788. doi:10.1109/JSEN.2018. 2808330. Khalifa, M., Hashim, H.A.,
-
[10]
Kumar, H., Parada-Mayorga, A., Ribeiro, A.,
doi:10.1016/j.measurement.2026.121964. Kumar, H., Parada-Mayorga, A., Ribeiro, A.,
-
[11]
IEEE Transactions on Signal Processing 72, 2842–2857
Lie group algebra convolutional filters. IEEE Transactions on Signal Processing 72, 2842–2857. doi:10.1109/TSP. 2024.3365950. Li, T., Jiao, W.,
work page doi:10.1109/tsp 2024
-
[12]
Geometric algebra based kalman filter trajectory prediction, in: 2024 3rd International Symposium on Aerospace Engineering and Systems, ISAES 2024, Institute of Electrical and Electronics Engineers Inc.. pp. 103–108. doi:10.1109/ISAES61964.2024.10751074. Li, T., Wang, J.,
-
[13]
Lu, W., Luo, Y., Guo, C., Jiang, W.,
doi:10.1016/j.automatica.2024.111995. Lu, W., Luo, Y., Guo, C., Jiang, W.,
-
[14]
doi:10.1109/TIM.2025.3565028. Lynch, K.M., Park, F.C.,
-
[15]
Modern Robotics: Mechanics, Planning, and Con- trol. Cambridge University Press. doi:10.1017/9781316661239. Mitikiri, Y.B., Mohseni, K.,
-
[16]
Murray, R.M., Li, Z., Sastry, S.S.,
doi:10.1016/j.automatica.2021.109494. Murray, R.M., Li, Z., Sastry, S.S.,
-
[17]
A Mathematical Introduction to Robotic Manipulation. CRC Press. doi:10.1201/9781315136370. 19 M¨ uller, A.,
-
[18]
Multibody System Dynamics 43, 37–70
Screw and lie group theory in multibody kinematics. Multibody System Dynamics 43, 37–70. doi:10.1007/s11044-017-9582-7. Øksendal, B.,
-
[19]
Stochastic Differential Equations: An Introduction with Appli- cations. 6th ed., Springer. doi:10.1007/978-3-642-14394-6. Park, W., Liu, Y., Zhou, Y., Moses, M., Chirikjian, G.S.,
-
[20]
Kinematic state estimation and motion planning for stochastic nonholonomic systems using the exponential map. Robotica 26, 419–434. doi:10.1017/S0263574708004475. Phogat, K.S., Chang, D.E.,
-
[21]
Reif, K., G¨ unther, S., Yaz, E., Unbehauen, R.,
doi:10.1016/j.automatica.2020.108812. Reif, K., G¨ unther, S., Yaz, E., Unbehauen, R.,
-
[22]
IEEE Transactions on Automatic Control 44, 714–728
Stochastic stability of the discrete-time extended Kalman filter. IEEE Transactions on Automatic Control 44, 714–728. doi:10.1109/9.754809. Rigo, D., Sansonetto, N., Muradore, R.,
-
[23]
Thrun, S., Burgard, W., Fox, D.,
doi:10.1016/ j.sysconle.2023.105568. Thrun, S., Burgard, W., Fox, D.,
-
[24]
IEEE Transactions on Automatic Control 23, 395–404
Computing integrals involving the matrix exponential. IEEE Transactions on Automatic Control 23, 395–404. doi:10.1109/TAC.1978. 1101743. Welch, G., Bishop, G.,
-
[25]
Geometrically-based adaptive kalman filtering for attitude estimation, in: 2025 5th International Conference on Sensors and Information Technology, ICSI 2025, Institute of Electrical and Electronics Engineers Inc.. pp. 206–210. doi:10.1109/ICSI64877.2025.11009328. Yue, C., Liu, J., Guan, L.,
-
[26]
Zhang, C., Qin, J., Yan, C., Shi, Y., Wang, Y., Li, M.,
doi:10.1016/j.mechmachtheory.2025.106297. Zhang, C., Qin, J., Yan, C., Shi, Y., Wang, Y., Li, M.,
-
[27]
doi:10.1016/j.automatica.2023.111408. A Proof of the Group-Affine Property Proposition 2.The pose kinematics˙g i =g iVi satisfy the group-affine property: the left-invariant error˜gi = ˆg−1 i gi evolves autonomously, independent ofˆg i. 20 Proof.Differentiating ˜gi = ˆg−1 i gi and substituting ˙ˆgi = ˆgi ˆVi, ˙gi =g iVi: ˙˜gi =−ˆg−1 i ˙ˆgiˆg−1 i gi + ˆg−1...
-
[28]
Atθ i →πthe skew-part formula is singular; the axis must be recovered from the symmetric part of ˜Ri as the eigenvector for eigenvalue +1. 21 SE(3)logarithm.The translation component requires the left Jacobian in- verse (Chirikjian, 2012): J−1 l (ϕ) = θ/2 tan(θ/2)I3 + 1− θ/2 tan(θ/2) ϕϕ⊤ θ2 − 1 2[ϕ]×.(68) The complete six-dimensional pose error vector is:...
2012
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.