MIL-LC: A Robust Magnetometer-Inertial-LiDAR Fusion Multimodal Localization Framework
Pith reviewed 2026-06-25 20:50 UTC · model grok-4.3
The pith
Fusing magnetometer, inertial and LiDAR data enables reliable localization for robots in challenging indoor environments.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The MIL-LC framework provides reliable localization by fusing data from a custom magnetometer-inertial-LiDAR sensor suite, maintaining performance when LiDAR experiences geometric degeneration or when the magnetic map changes over long-term deployment, as validated in simulation and real-world tests.
What carries the argument
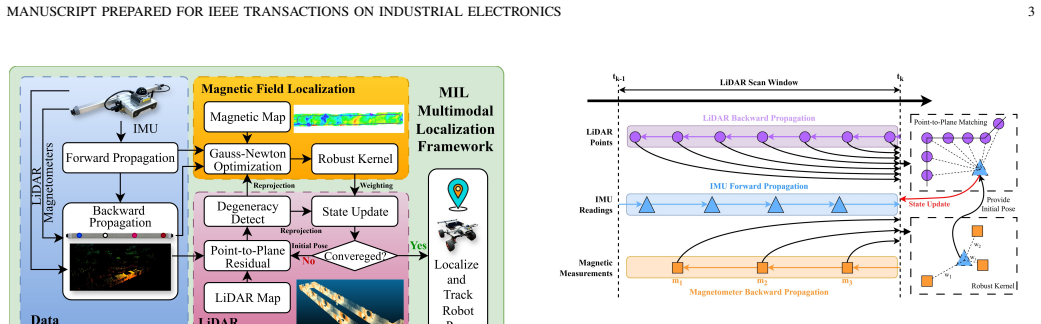
The MIL-LC multimodal fusion framework that integrates ambient magnetic field measurements to complement inertial and LiDAR data for localization.
If this is right
- Robots can localize accurately without depending on geometric or texture features.
- Deployment becomes possible without installing additional infrastructure like beacons.
- Localization remains stable during extended operations despite shifts in the magnetic environment.
- Both simulated and physical experiments confirm the framework's robustness in GNSS-denied settings.
Where Pith is reading between the lines
- The method could be adapted to other robotic platforms beyond AMRs.
- Combining this with other modalities might further improve performance in extreme cases.
- Long-term studies on magnetic field stability in different building types would help assess scalability.
Load-bearing premise
The ambient magnetic field supplies distinctive and repeatable signatures usable for localization in typical AMR environments.
What would settle it
Demonstrating failure of localization in a space where the magnetic field lacks variation or changes unpredictably without corresponding updates to the map.
Figures



read the original abstract
Localization in challenging environments, such as GNSS-denied, geometrically repetitive, or textureless scenes commonly found in offices, hotels, and underground parking facilities, remains an open problem for reliable autonomous mobile robot (AMR) deployment. Single-modality localization methods are inherently limited by the constraints of individual sensors. Although multimodal fusion frameworks have shown improved robustness, most existing approaches still rely heavily on geometric or texture features, or on infrastructure-based beacons, which increase installation and maintenance costs while reducing deployment flexibility. Recently, ambient magnetic field (AMF)-based localization has attracted growing attention because it does not depend on geometric or texture features, nor does it require additional infrastructure, making it a promising complementary modality for AMR localization. However, existing studies have only explored such fusion in pedestrian scenarios using smartphone-mounted sensor suites, and practical solutions for AMR systems remain largely unexplored. To address this gap, this article proposes a magnetometer-inertial-LiDAR fused multimodal localization framework with a custom-designed sensor suite, termed MIL-LC, which provides reliable localization even when LiDAR suffers from geometric degeneration or when the magnetic map changes during long-term deployment. Extensive experiments in both simulation and real-world environments demonstrate that the proposed MIL-LC framework achieves robust and accurate localization performance.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes MIL-LC, a magnetometer-inertial-LiDAR fusion framework for AMR localization in GNSS-denied, geometrically repetitive or textureless environments. It claims that ambient magnetic field signatures enable reliable localization when LiDAR degenerates geometrically or when the magnetic map changes over long-term deployment, without requiring additional infrastructure, and supports this with a custom sensor suite plus extensive simulation and real-world experiments.
Significance. If the quantitative claims hold, the work would address a genuine gap between pedestrian-focused magnetic fusion studies and practical AMR deployment by demonstrating infrastructure-free complementarity to LiDAR-inertial pipelines under map drift and degeneration; the absence of fitted parameters or circular derivations in the presented text is a positive feature.
major comments (1)
- [Abstract] Abstract: the central claim that MIL-LC 'provides reliable localization even when LiDAR suffers from geometric degeneration or when the magnetic map changes' is asserted but unsupported by any error metrics, repeatability statistics, distinctiveness measures, or explicit handling of map change; without these the experimental validation cannot be evaluated.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We address the major comment below and will incorporate revisions to strengthen the abstract's presentation of results.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim that MIL-LC 'provides reliable localization even when LiDAR suffers from geometric degeneration or when the magnetic map changes' is asserted but unsupported by any error metrics, repeatability statistics, distinctiveness measures, or explicit handling of map change; without these the experimental validation cannot be evaluated.
Authors: We agree that the abstract would benefit from explicit quantitative support to make the central claims immediately evaluable. The full manuscript details extensive simulation and real-world experiments with error metrics (e.g., RMSE under degeneration), repeatability across trials, and long-term tests demonstrating robustness to magnetic map changes via the fusion pipeline. However, we acknowledge the abstract itself lacks these specifics. In the revised version, we will update the abstract to include representative error metrics, repeatability statistics, and a brief note on map-change handling. This addresses the presentation concern while the experimental sections already provide the supporting analysis and distinctiveness through magnetic signature complementarity. revision: yes
Circularity Check
No significant circularity detected
full rationale
The abstract and available text contain no equations, parameter fittings, self-citations, or derivation steps that reduce to inputs by construction. The central claims concern empirical robustness of a proposed sensor-fusion framework in specific environments, presented as outcomes of experiments rather than any self-referential mathematical reduction. No load-bearing steps match the enumerated circularity patterns, and the work is self-contained as a framework proposal without visible internal circularity.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Mc-mapping: Magnetic-aware collaborative mapping in perceptually degraded environments,
Z. Wu, W. Wang, H. Shen, Q. Lyu, T. Deng, G. Peng, H. Zhou, and D. Wang, “Mc-mapping: Magnetic-aware collaborative mapping in perceptually degraded environments,”IEEE Transactions on Industrial Electronics, 2026
2026
-
[2]
Simsl: A semantic instance-based multisensor fusion localization system for challenging dynamic and degraded environments,
Y . Li, L. Jiang, B. Lei, B. Tang, J. Zhu, and H. Liu, “Simsl: A semantic instance-based multisensor fusion localization system for challenging dynamic and degraded environments,”IEEE Transactions on Industrial Electronics, 2025
2025
-
[3]
Vins-mono: A robust and versatile monocular visual-inertial state estimator,
T. Qin, P. Li, and S. Shen, “Vins-mono: A robust and versatile monocular visual-inertial state estimator,”IEEE Transactions on Robotics, vol. 34, no. 4, pp. 1004–1020, 2018
2018
-
[4]
Fast-lio: A fast, robust lidar-inertial odometry package by tightly-coupled iterated kalman filter,
W. Xu and F. Zhang, “Fast-lio: A fast, robust lidar-inertial odometry package by tightly-coupled iterated kalman filter,”IEEE Robotics and Automation Letters, vol. 6, no. 2, pp. 3317–3324, 2021
2021
-
[5]
Mglt: Magnetic-lead global localization and tracking in degenerated repetitive environments,
Z. Wu, W. Wang, J. Zhang, Y . Wang, G. Peng, and D. Wang, “Mglt: Magnetic-lead global localization and tracking in degenerated repetitive environments,”IEEE/ASME Transactions on Mechatronics, vol. 29, no. 6, pp. 4687–4698, 2024
2024
-
[6]
An integrated gnss/lidar- slam pose estimation framework for large-scale map building in partially gnss-denied environments,
G. He, X. Yuan, Y . Zhuang, and H. Hu, “An integrated gnss/lidar- slam pose estimation framework for large-scale map building in partially gnss-denied environments,”IEEE Transactions on Instrumentation and Measurement, vol. 70, pp. 1–9, 2020
2020
-
[7]
Lcdl: toward dynamic localization for autonomous landing of unmanned aerial vehicle based on lidar–camera fusion,
Y . Xu, Z. Chen, C. Deng, S. Wang, and J. Wang, “Lcdl: toward dynamic localization for autonomous landing of unmanned aerial vehicle based on lidar–camera fusion,”IEEE Sensors Journal, vol. 24, no. 16, pp. 26407– 26415, 2024
2024
-
[8]
A review of visual-lidar fusion based simultaneous localization and mapping,
C. Debeunne and D. Vivet, “A review of visual-lidar fusion based simultaneous localization and mapping,”sensors, vol. 20, no. 7, p. 2068, 2020
2068
-
[9]
Range-focused fusion of camera-imu-uwb for accurate and drift-reduced localization,
T. H. Nguyen, T.-M. Nguyen, and L. Xie, “Range-focused fusion of camera-imu-uwb for accurate and drift-reduced localization,”IEEE Robotics and Automation Letters, vol. 6, no. 2, pp. 1678–1685, 2021
2021
-
[10]
Rf-slam: Uhf- rfid based simultaneous tags mapping and robot localization algorithm for smart warehouse position service,
C. Wu, Z. Gong, B. Tao, K. Tan, Z. Gu, and Z.-P. Yin, “Rf-slam: Uhf- rfid based simultaneous tags mapping and robot localization algorithm for smart warehouse position service,”IEEE Transactions on Industrial Informatics, vol. 19, no. 12, pp. 11765–11775, 2023
2023
-
[11]
Long-distance navigation and magnetoreception in mi- gratory animals,
H. Mouritsen, “Long-distance navigation and magnetoreception in mi- gratory animals,”Nature, vol. 558, no. 7708, pp. 50–59, 2018. MANUSCRIPT PREPARED FOR IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS 10
2018
-
[12]
How he use of magnetic field alone for indoor positioning?,
B. Li, T. Gallagher, A. G. Dempster, and C. Rizos, “How he use of magnetic field alone for indoor positioning?,” in2012 Internatfeasible is tional Conference on Indoor Positioning and Indoor Navigation (IPIN), pp. 1–9, 2012
2012
-
[13]
Idf-mfl: Infrastructure-free and drift-free magnetic field localization for mobile robot,
H. Shen, Z. Wu, W. Wang, Q. Lyu, H. Zhou, and D. Wang, “Idf-mfl: Infrastructure-free and drift-free magnetic field localization for mobile robot,” in2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 2278–2285, 2024
2024
-
[14]
Locateme: Magnetic-fields-based indoor localization using smartphones,
K. P. Subbu, B. Gozick, and R. Dantu, “Locateme: Magnetic-fields-based indoor localization using smartphones,”ACM Transactions on Intelligent Systems and Technology (TIST), vol. 4, no. 4, pp. 1–27, 2013
2013
-
[15]
Indoor mobile robot localization and mapping based on ambient magnetic fields and aiding radio sources,
J. Jung, S.-M. Lee, and H. Myung, “Indoor mobile robot localization and mapping based on ambient magnetic fields and aiding radio sources,” IEEE Transactions on Instrumentation and Measurement, vol. 64, no. 7, pp. 1922–1934, 2015
1922
-
[16]
Magicol: Indoor localization using pervasive magnetic field and opportunistic wifi sensing,
Y . Shu, C. Bo, G. Shen, C. Zhao, L. Li, and F. Zhao, “Magicol: Indoor localization using pervasive magnetic field and opportunistic wifi sensing,”IEEE Journal on Selected Areas in Communications, vol. 33, no. 7, pp. 1443–1457, 2015
2015
-
[17]
Magnetic-based indoor localiza- tion using smartphone via a fusion algorithm,
G. Wang, X. Wang, J. Nie, and L. Lin, “Magnetic-based indoor localiza- tion using smartphone via a fusion algorithm,”IEEE Sensors Journal, vol. 19, no. 15, pp. 6477–6485, 2019
2019
-
[18]
Fusion of magnetic and visual sensors for indoor localization: Infrastructure-free and more effective,
Z. Liu, L. Zhang, Q. Liu, Y . Yin, L. Cheng, and R. Zimmer- mann, “Fusion of magnetic and visual sensors for indoor localization: Infrastructure-free and more effective,”IEEE Transactions on Multime- dia, vol. 19, no. 4, pp. 874–888, 2017
2017
-
[19]
Multi-sensor fusion and semantic map-based particle filtering for robust indoor localization,
X. Yang, X. Huang, Y . Zhang, Z. Liu, and Y . Pang, “Multi-sensor fusion and semantic map-based particle filtering for robust indoor localization,” Measurement, vol. 242, p. 115874, 2025
2025
-
[20]
Information fusion for positioning system with location constraint of camera and uwb,
X. Hao, H. Yang, and Y . Xu, “Information fusion for positioning system with location constraint of camera and uwb,”IEEE Transactions on Automation Science and Engineering, 2025
2025
-
[21]
Gnss/imu/lidar fusion for vehicle localization in urban driving environments within a consensus frame- work,
L. Gao, X. Xia, Z. Zheng, and J. Ma, “Gnss/imu/lidar fusion for vehicle localization in urban driving environments within a consensus frame- work,”Mechanical Systems and Signal Processing, vol. 205, p. 110862, 2023
2023
-
[22]
A lidar-imu- gnss fused mapping method for large-scale and high-speed scenarios,
Z. Shen, J. Wang, C. Pang, Z. Lan, and Z. Fang, “A lidar-imu- gnss fused mapping method for large-scale and high-speed scenarios,” Measurement, vol. 225, p. 113961, 2024
2024
-
[23]
Lidar/uwb fusion based slam with anti- degeneration capability,
H. Zhou, Z. Yao, and M. Lu, “Lidar/uwb fusion based slam with anti- degeneration capability,”IEEE Transactions on Vehicular Technology, vol. 70, no. 1, pp. 820–830, 2020
2020
-
[24]
Tightly coupled lidar/imu/uwb fusion via resilient factor graph for quadruped robot positioning,
Y . Kuang, T. Hu, M. Ouyang, Y . Yang, and X. Zhang, “Tightly coupled lidar/imu/uwb fusion via resilient factor graph for quadruped robot positioning,”Remote Sensing, vol. 16, no. 22, p. 4171, 2024
2024
-
[25]
Lidar, imu, and camera fusion for simultaneous localization and mapping: A systematic review,
Z. Fan, L. Zhang, X. Wang, Y . Shen, and F. Deng, “Lidar, imu, and camera fusion for simultaneous localization and mapping: A systematic review,”Artificial Intelligence Review, vol. 58, no. 6, p. 174, 2025
2025
-
[26]
Magloc-ar: Magnetic-based localization for visual-free augmented reality in large- scale indoor environments,
H. Liu, H. Xue, L. Zhao, D. Chen, Z. Peng, and G. Zhang, “Magloc-ar: Magnetic-based localization for visual-free augmented reality in large- scale indoor environments,”IEEE Transactions on Visualization and Computer Graphics, vol. 29, no. 11, pp. 4383–4393, 2023
2023
-
[27]
Magnetic field aided vehicle localization with acceleration correction,
M. Deshpande, M. Majji, and J. H. Ramos, “Magnetic field aided vehicle localization with acceleration correction,” in2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 3234–3239, IEEE, 2024
2024
-
[28]
Fast-lio2: Fast direct lidar-inertial odometry,
W. Xu, Y . Cai, D. He, J. Lin, and F. Zhang, “Fast-lio2: Fast direct lidar-inertial odometry,”IEEE Transactions on Robotics, vol. 38, no. 4, pp. 2053–2073, 2022
2053
-
[29]
S- gpr: Sliding gaussian process regression-based magnetic mapping and evaluation of different magnetic mapping methods,
Q. Lyu, Z. Wu, H. Shen, W. Wang, J. Zhang, H. Zhou, and D. Wang, “S- gpr: Sliding gaussian process regression-based magnetic mapping and evaluation of different magnetic mapping methods,” inIECON 2024- 50th Annual Conference of the IEEE Industrial Electronics Society, pp. 1–7, IEEE, 2024
2024
-
[30]
On degeneracy of optimization-based state estimation problems,
J. Zhang, M. Kaess, and S. Singh, “On degeneracy of optimization-based state estimation problems,” in2016 IEEE international conference on robotics and automation (ICRA), pp. 809–816, IEEE, 2016
2016
-
[31]
Informed, constrained, aligned: A field analysis on degeneracy- aware point cloud registration in the wild,
T. Tuna, J. Nubert, P. Pfreundschuh, C. Cadena, S. Khattak, and M. Hut- ter, “Informed, constrained, aligned: A field analysis on degeneracy- aware point cloud registration in the wild,”IEEE Transactions on Field Robotics, 2025
2025
-
[32]
Roslac: Robust simultaneous localization and calibration of multiple magnetometers,
Q. Lyu, Z. Wu, W. Wang, H. Shen, and D. Wang, “Roslac: Robust simultaneous localization and calibration of multiple magnetometers,” arXiv preprint arXiv:2604.14353, 2026
Pith/arXiv arXiv 2026
-
[33]
Cte-mlo: Continuous-time and efficient multi-lidar odometry with localizability-aware point cloud sampling,
H. Shen, Z. Wu, Y . Hui, W. Wang, Q. Lyu, T. Deng, Y . Zhu, B. Tian, and D. Wang, “Cte-mlo: Continuous-time and efficient multi-lidar odometry with localizability-aware point cloud sampling,”IEEE Transactions on Field Robotics, vol. 2, pp. 165–187, 2025
2025
-
[34]
A portable three-dimensional lidar-based system for long-term and wide-area people behavior mea- surement,
K. Koide, J. Miura, and E. Menegatti, “A portable three-dimensional lidar-based system for long-term and wide-area people behavior mea- surement,”International Journal of Advanced Robotic Systems, vol. 16, no. 2, p. 1729881419841532, 2019
2019
-
[35]
Pdr/geomagnetic fusion localization method based on aofa-improved particle filter,
L.-F. Shi, M.-X. Yu, and W. Yin, “Pdr/geomagnetic fusion localization method based on aofa-improved particle filter,”IEEE Transactions on Instrumentation and Measurement, vol. 71, pp. 1–9, 2022. Qiyang Lyureceived his B.Eng degree of Electronic Information Engineering from University of Elec- tronic Science and Technology of China, China, in 2020, and the...
2022
-
[36]
Currently, he is Emeritus Professor and was the Director of the ST Engineering-NTU Robotics Corporate Lab
Since 1989, he has been with the School of Electrical and Electronic Engineering, Nanyang Technological University, Singapore. Currently, he is Emeritus Professor and was the Director of the ST Engineering-NTU Robotics Corporate Lab. He is the Chair of IEEE Singapore Robotics and Automation Chapter and a senator in NTU Academics Council. He has served as ...
1989
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.