Insertion algorithm for inverting the signature of a path
Pith reviewed 2026-05-24 19:27 UTC · model grok-4.3
The pith
An insertion method reconstructs a path from its signature by bounding differences in normalized terms.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
We introduce the insertion method for reconstructing the path from its signature, i.e. inverting the signature of a path. For this purpose, we prove that a converging upper bound exists for the difference between the inserted n-th term and the (n+1)-th term of the normalised signature of a smooth path, and we also show that there exists a constant lower bound for a subsequence of the terms in the normalised signature of a piecewise linear path.
What carries the argument
The insertion method, which inserts successive terms into the signature sequence and uses the proven bounds to reconstruct the underlying path.
If this is right
- The signature of a smooth path can be inverted by successively inserting terms whose differences converge.
- A constant lower bound on a subsequence of normalized signature terms permits identification of the underlying piecewise linear path.
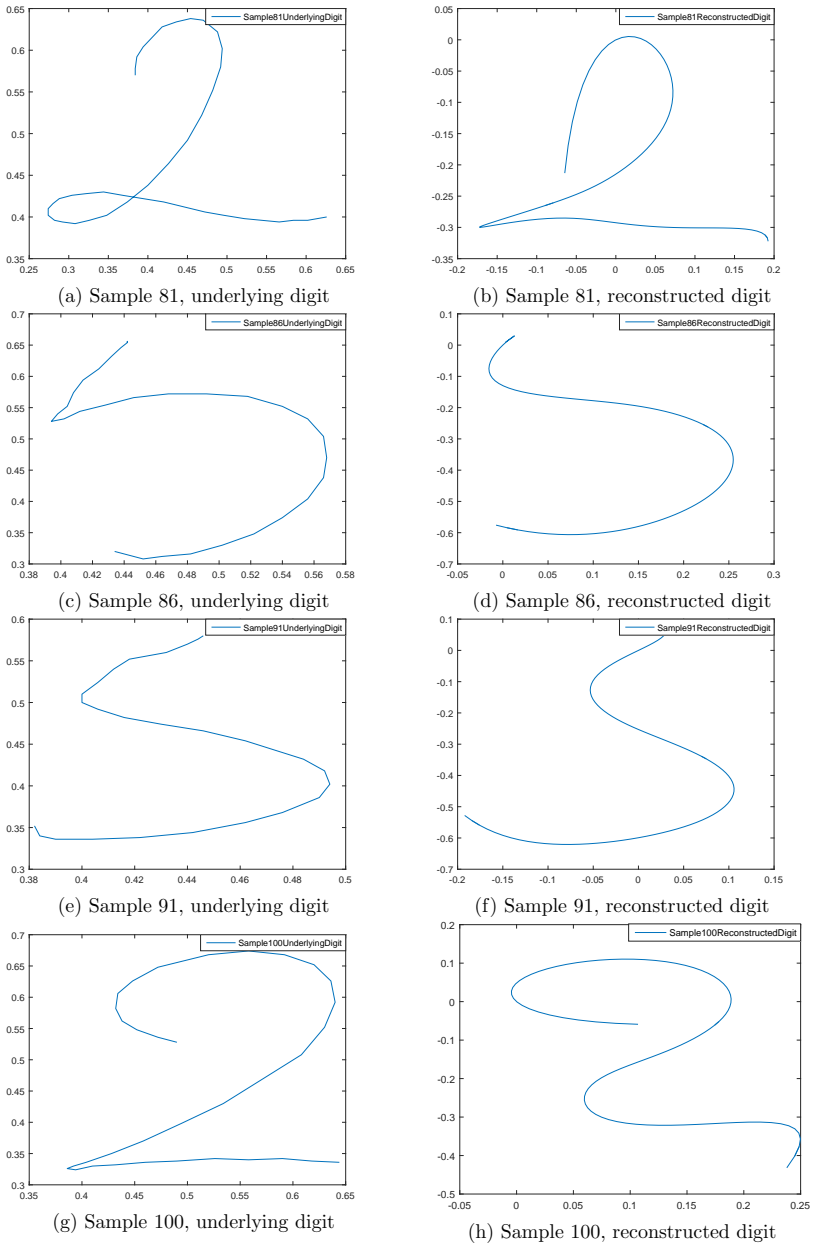
- Numerical evaluation of the insertion procedure recovers concrete paths from their signatures in both the smooth and piecewise-linear cases.
Where Pith is reading between the lines
- The same insertion bounds may supply error estimates when the method is applied to approximate or discretised signatures arising in applications.
- If the lower-bound property extends beyond piecewise-linear paths to paths of bounded variation, the algorithm could apply to a wider class of time series.
Load-bearing premise
The paths must belong to the smooth class for the converging upper bound or to the piecewise-linear class for the constant lower bound.
What would settle it
Finding a smooth path for which the difference between the inserted n-th term and the (n+1)-th term of the normalized signature fails to admit a converging upper bound would disprove the first claim.
Figures










read the original abstract
In this article we introduce the insertion method for reconstructing the path from its signature, i.e. inverting the signature of a path. For this purpose, we prove that a converging upper bound exists for the difference between the inserted n-th term and the (n+1)-th term of the normalised signature of a smooth path, and we also show that there exists a constant lower bound for a subsequence of the terms in the normalised signature of a piecewise linear path. We demonstrate our results with numerical examples.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces an insertion method for inverting the signature of a path (i.e., reconstructing the path from its signature). It proves the existence of a converging upper bound on the difference between the inserted n-th term and the (n+1)-th term of the normalised signature for smooth paths, and the existence of a constant lower bound for a subsequence of terms in the normalised signature for piecewise linear paths. The claims are supported by numerical examples.
Significance. Signature inversion is a core problem in rough path theory with applications in stochastic analysis and data science. If the stated bounds are rigorously established as claimed, the insertion method supplies a constructive approach with explicit convergence guarantees differentiated by path regularity class (smooth vs. piecewise linear). The provision of both an upper bound that converges and a constant lower bound on a subsequence constitutes a concrete theoretical contribution that could guide practical reconstruction algorithms.
minor comments (3)
- [Abstract] The abstract refers to the 'normalised signature' without a definition or citation; a one-sentence clarification or pointer to the relevant section would improve readability for readers outside the immediate subfield.
- Numerical examples are mentioned but the manuscript does not specify the path classes, truncation levels, or error metrics used in the demonstrations; adding these details would strengthen the connection between the proved bounds and the reported illustrations.
- Notation for the inserted terms and the difference being bounded should be introduced with an explicit equation reference in the main text to avoid ambiguity when the bounds are stated.
Simulated Author's Rebuttal
We thank the referee for their positive assessment of the manuscript, recognition of its significance for signature inversion, and recommendation of minor revision. We appreciate the note that the insertion method could supply a constructive approach with explicit convergence guarantees. No specific major comments were listed in the report.
Circularity Check
No significant circularity
full rationale
The paper introduces the insertion method and states two explicit theorems: a converging upper bound on the difference between inserted n-th and (n+1)-th terms for smooth paths, and a constant lower bound on a subsequence for piecewise-linear paths. Both results are presented as direct proofs from the definition of the signature transform on the stated path classes, with no reduction of any claim to a fitted parameter, self-referential definition, or load-bearing prior result by the same authors. The derivation chain therefore remains self-contained against external mathematical benchmarks.
Axiom & Free-Parameter Ledger
Forward citations
Cited by 1 Pith paper
-
SignatureTensors.jl: A Package for Signature Tensors in Julia
SignatureTensors.jl is a new Julia package that computes signature tensors of paths, supporting both exact symbolic and numerical computations via compatibility with the OSCAR computer algebra system.
Reference graph
Works this paper leans on
-
[1]
E. Anderson, Z. Bai, C. Bischof, L. S. Blackford, J. Demmel, Jack J. Dongarra, J. Du Croz, S. Hammarling, A. Greenbaum, A. McKenney, and D. Sorensen. LA- PACK Users’ Guide (Third Ed.) . Society for Industrial and Applied Mathematics, Philadelphia, PA, USA, 1999
work page 1999
-
[2]
A Non-vanishing Property for the Signature of a Path
Horatio Boedihardjo and Xi Geng. A non-vanishing property for the signature of a path. arXiv preprint arXiv:1808.05903 , 2018
work page internal anchor Pith review Pith/arXiv arXiv 2018
-
[3]
Libalgebra C++ Package, Computational Rough Paths
Stephen Buckley, Djalil Chafai, Lajos Gyurko, Arend Janssen, and Terry Lyons. Libalgebra C++ Package, Computational Rough Paths. https://sourceforge.net/ projects/coropa/
-
[4]
A short note on Poisson tail bounds
Cl´ ement Canonne. A short note on Poisson tail bounds. http://www.cs.columbia. edu/~ccanonne/files/misc/2017-poissonconcentration.pdf, 2017
work page 2017
-
[5]
Signature inversion for mono- tone paths
Jiawei Chang, Nick Duffield, Hao Ni, Weijun Xu, et al. Signature inversion for mono- tone paths. Electronic Communications in Probability, 22, 2017
work page 2017
-
[6]
Super-multiplicativity and a lower bound for the decay of the signature of a path of finite length
Jiawei Chang, Terry Lyons, and Hao Ni. Super-multiplicativity and a lower bound for the decay of the signature of a path of finite length. Comptes Rendus Mathematique , 2018. 36
work page 2018
-
[7]
Integration of paths–a faithful representation of paths by non- commutative formal power series
Kuo-sai Chen. Integration of paths–a faithful representation of paths by non- commutative formal power series. Transactions of the American Mathematical Society, 89(2):395–407, 1958
work page 1958
-
[8]
Integration of paths, geometric invariants and a generalized Baker- Hausdorff formula
Kuo-Tsai Chen. Integration of paths, geometric invariants and a generalized Baker- Hausdorff formula. Annals of Mathematics , pages 163–178, 1957
work page 1957
-
[9]
Kuo-Tsai Chen. Iterated path integrals. Bulletin of the American Mathematical So- ciety, 83(5):831–879, 1977
work page 1977
-
[10]
UCI Machine Learning Repository
Dua Dheeru and Efi Karra Taniskidou. UCI Machine Learning Repository. University of California, Irvine, School of Information and Computer Sciences, 2017. http: //archive.ics.uci.edu/ml
work page 2017
-
[11]
Reconstruction for the signature of a rough path
Xi Geng. Reconstruction for the signature of a rough path. Proceedings of the London Mathematical Society, 114(3):495–526, 2017
work page 2017
-
[12]
Uniqueness for the signature of a path of bounded variation and the reduced path group
Ben Hambly and Terry Lyons. Uniqueness for the signature of a path of bounded variation and the reduced path group. Annals of Mathematics , pages 109–167, 2010
work page 2010
-
[13]
Probability inequalities for sums of bounded random variables
Wassily Hoeffding. Probability inequalities for sums of bounded random variables. Journal of the American statistical association , 58(301):13–30, 1963
work page 1963
-
[14]
Differential equations driven by rough paths
Terry J Lyons, Michael Caruana, and Thierry L´ evy. Differential equations driven by rough paths. Springer, 2007
work page 2007
-
[15]
Hyperbolic development and inversion of signature
Terry J Lyons and Weijun Xu. Hyperbolic development and inversion of signature. Journal of Functional Analysis , 272(7):2933–2955, 2017
work page 2017
-
[16]
Inverting the signature of a path
Terry J Lyons and Weijun Xu. Inverting the signature of a path. Journal of the European Mathematical Society, 20(7):1655–1687, 2018
work page 2018
-
[17]
Learning Paths from Signature Tensors
Max Pfeffer, Anna Seigal, and Bernd Sturmfels. Learning paths from signature tensors. arXiv preprint arXiv:1809.01588 , 2018. 37 0.55 0.6 0.65 0.7 0.75 0.80.35 0.4 0.45 0.5 0.55 0.6 0.65 0.7 0.75 Sample107UnderlyingDigit (a) Sample 107, underlying digit -0.05 0 0.05 0.1 0.15 0.2 0.25 0.3-0.2 -0.15 -0.1 -0.05 0 0.05 0.1 0.15 Sample107ReconstructedDigit (b) ...
work page internal anchor Pith review Pith/arXiv arXiv 2018
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.