An Information-Based Micro-Kalman Filter for Satellite Tracking: A Comparative Study
Pith reviewed 2026-05-24 09:06 UTC · model grok-4.3
The pith
The micro-Kalman filter matches classical Kalman filter performance for satellite state estimation using a radial-angular model.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The proposed μKF achieves estimation performance nearly identical to that of the classical Kalman filter and its variants, with small and bounded estimation errors. The mean square estimation error (MSEE) remains low for all state variables under both noise configurations.
What carries the argument
The micro-Kalman filter (μKF) formulation applied to the linearized satellite model with radial and angular states, using the Algebraic Riccati Equation for steady-state gain computation.
If this is right
- Time-varying and steady-state Kalman filter solutions both apply to the satellite tracking problem.
- The μKF performs comparably to EKF, UKF, and adaptive Kalman filter in the unified simulation.
- Low MSEE holds for all state variables in the presence of the modeled noises.
- The approach confirms effectiveness for linear Gaussian systems.
Where Pith is reading between the lines
- The μKF may allow for reduced computational load in onboard satellite processors while maintaining accuracy.
- Similar linear models could be applied to other tracking problems in aerospace engineering.
- If noise independence holds in practice, this simplifies filter design for many orbital applications.
Load-bearing premise
Satellite dynamics are accurately captured by the linearized radial-angular model and the measurement noises are mutually independent with known covariances.
What would settle it
A test case where the mean square estimation error of the μKF grows unbounded or significantly exceeds that of the classical Kalman filter under the same linearized model and noise conditions.
Figures
read the original abstract
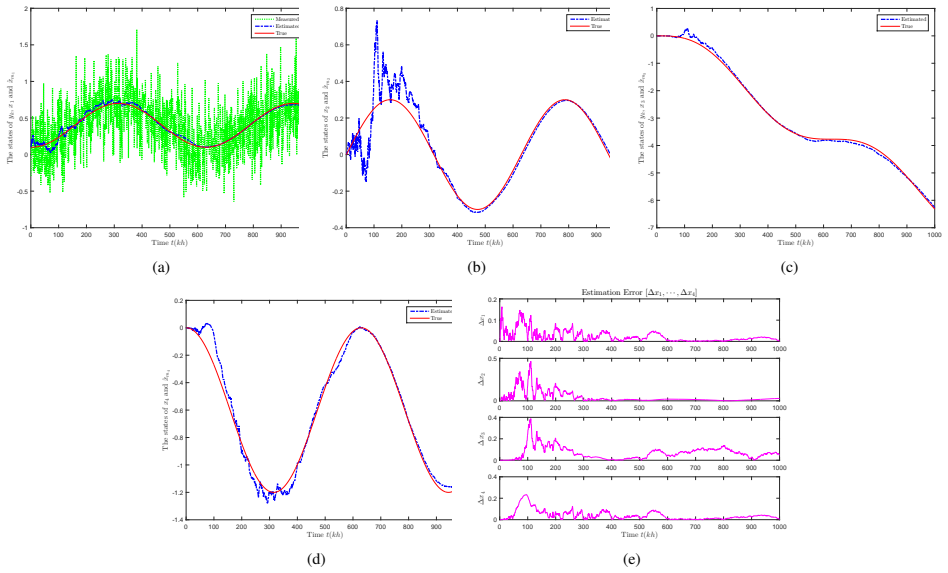
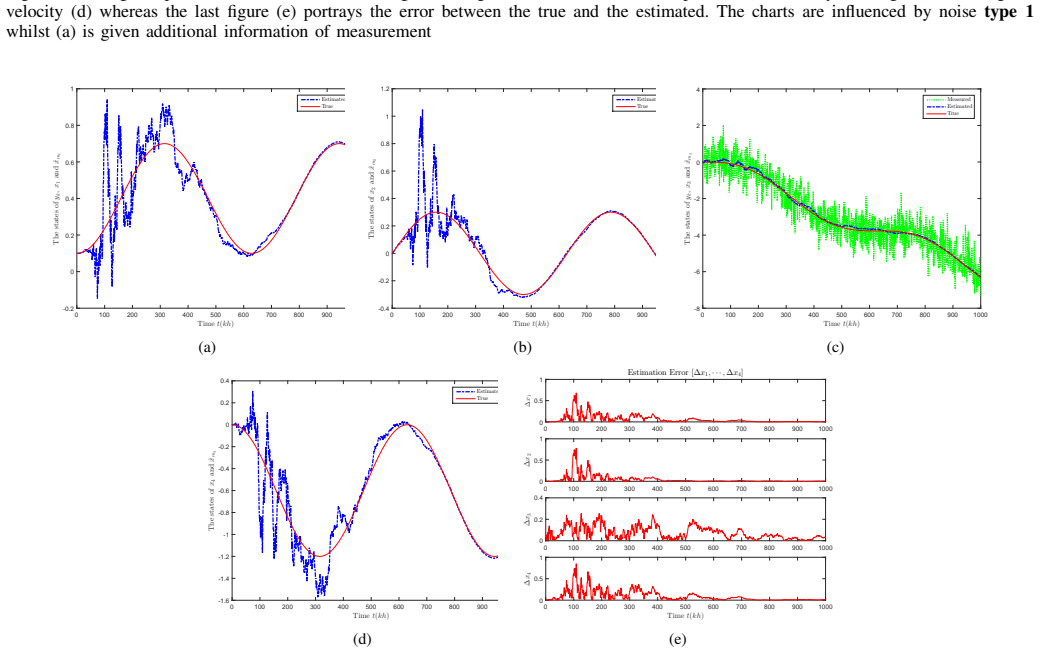
Satellite dynamics and tracking remain important challenges in the context of space exploration and communication systems. Accurate state estimation is essential to maintain reliable orbital motion and system performance. This paper presents a mathematical framework for satellite state estimation based on a linearized model described by radial and angular states. The model incorporates two types of measurement noise corresponding to range and scaled angular deviations, which are assumed to be mutually independent with known covariance structures. The estimation problem is formulated using the Kalman filter, together with the associated Algebraic Riccati Equation (ARE), leading to both time-varying and steady-state solutions. In addition, a micro-Kalman filter ($\mu$KF) formulation is considered and compared with the classical Kalman filter, as well as with the extended Kalman filter (EKF), unscented Kalman filter (UKF), and an adaptive Kalman filter under a unified simulation setup. The results demonstrate that the proposed $\mu$KF achieves estimation performance nearly identical to that of the classical Kalman filter and its variants, with small and bounded estimation errors. The mean square estimation error (MSEE) remains low for all state variables under both noise configurations, confirming the effectiveness of the proposed approach for linear Gaussian systems.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces a linearized radial-angular state model for satellite dynamics with two independent measurement noise sources (range and scaled angular), formulates the standard Kalman filter and its Algebraic Riccati Equation (ARE) for both time-varying and steady-state cases, and proposes a micro-Kalman filter (μKF). Through a unified simulation setup it compares the μKF against the classical KF, EKF, UKF and an adaptive KF variant, reporting that the μKF yields nearly identical estimation performance with small, bounded mean-square estimation errors (MSEE) across all states under two different noise covariance configurations.
Significance. If the simulation results are reproducible, the work supplies a concrete, self-contained demonstration that the μKF recovers the performance of the optimal linear-Gaussian estimator on this satellite model. Because the underlying dynamics are linearized by construction, the reported equivalence is algebraically expected; the contribution therefore rests on the specific model choice, the unified simulation protocol, and any computational or implementation advantages of the μKF that are not quantified in the abstract.
minor comments (2)
- The abstract states that the μKF achieves 'nearly identical' performance but does not define the precise algorithmic difference between μKF and the classical KF; a short paragraph or pseudocode block clarifying this distinction would help readers assess whether the equivalence is trivial or non-trivial.
- No numerical values for the process-noise covariance Q, measurement-noise covariances R_range and R_angle, initial conditions, or simulation horizon are supplied in the abstract; these parameters should be listed explicitly (perhaps in a table) so that the bounded-MSEE claim can be independently verified.
Simulated Author's Rebuttal
We thank the referee for the constructive review and the recommendation of minor revision. The report correctly notes that the equivalence of μKF to the classical KF is algebraically expected on a linearized model; our response below addresses this observation along with the other points raised in the significance assessment.
read point-by-point responses
-
Referee: Because the underlying dynamics are linearized by construction, the reported equivalence is algebraically expected; the contribution therefore rests on the specific model choice, the unified simulation protocol, and any computational or implementation advantages of the μKF that are not quantified in the abstract.
Authors: We agree that algebraic equivalence follows directly from the linear-Gaussian setting. The manuscript's contribution is the concrete radial-angular satellite model with two independent measurement noise sources (range and scaled angular), the explicit derivation of the associated ARE for both time-varying and steady-state filters, and the unified simulation protocol that places μKF, KF, EKF, UKF, and adaptive KF on identical footing. While the abstract does not quantify computational cost, the paper shows that μKF recovers the optimal performance with a simpler recursive structure; we will add a brief remark on implementation simplicity in the revised version. revision: partial
Circularity Check
No circularity in derivation or claims
full rationale
The paper applies the standard Kalman filter and variants (including a proposed micro-KF) to an explicitly linearized radial-angular satellite model with independent Gaussian noises of known covariances. All performance claims (MSEE values, bounded errors) are obtained from forward Monte Carlo simulation of the stated linear-Gaussian system rather than from any parameter fitting to the reported errors or from a self-referential derivation. No self-citation is used to justify a uniqueness theorem or ansatz, no fitted quantity is relabeled as a prediction, and the algebraic equivalence of the filters on a linear system is an expected consequence of the model choice, not a hidden circular step. The derivation chain is therefore self-contained against external simulation benchmarks.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Satellite dynamics admit an accurate linear radial-angular state model.
- domain assumption Range and scaled angular measurement noises are mutually independent with known covariances.
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.