PROBE: Probabilistic Occupancy BEV Encoding with Analytical Translation Robustness for 3D Place Recognition
Pith reviewed 2026-05-15 15:45 UTC · model grok-4.3
The pith
PROBE encodes LiDAR bird's-eye-view grids as Bernoulli occupancy variables and marginalizes continuous translations analytically to achieve translation-robust place recognition without learning.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
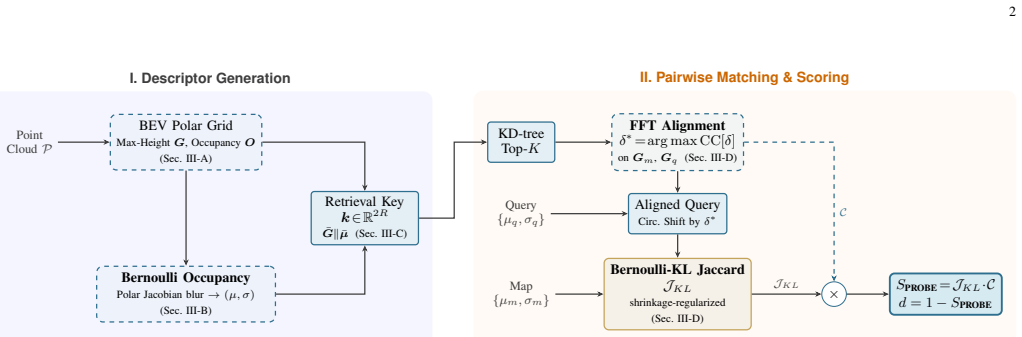
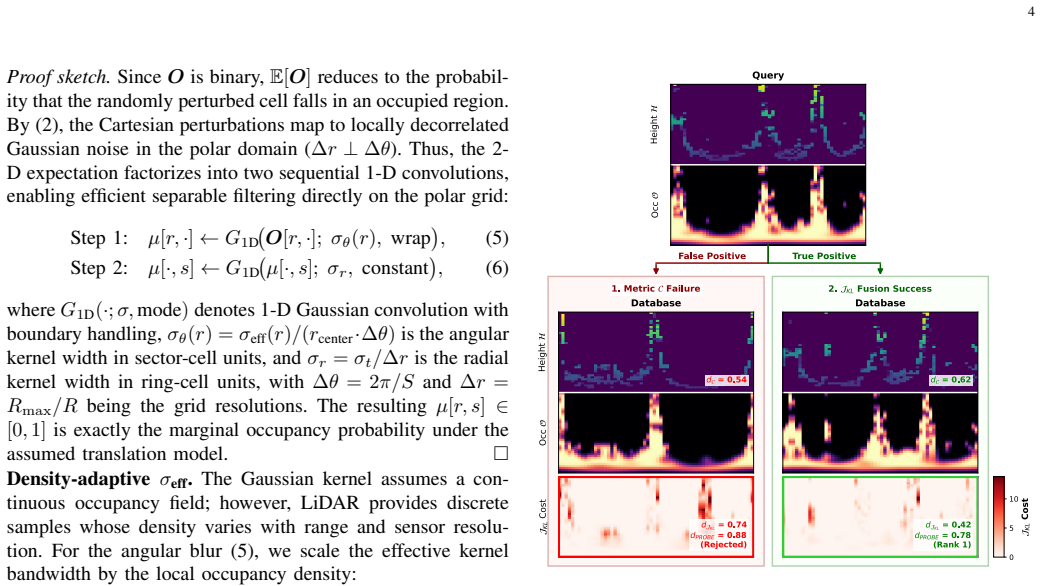
By treating BEV occupancy as Bernoulli random variables and analytically marginalizing over continuous Cartesian translations through the polar Jacobian, PROBE produces a distance-adaptive angular uncertainty sigma_theta equals sigma_t over r that yields a translation-robust descriptor computable in O(R S) time, with the single parameter sigma_t serving as a sensor-independent physical quantity that improves cross-sensor generalization and reduces dataset-specific tuning.
What carries the argument
Probabilistic occupancy BEV encoding that analytically marginalizes translations via the polar Jacobian to obtain sigma_theta equals sigma_t over r
If this is right
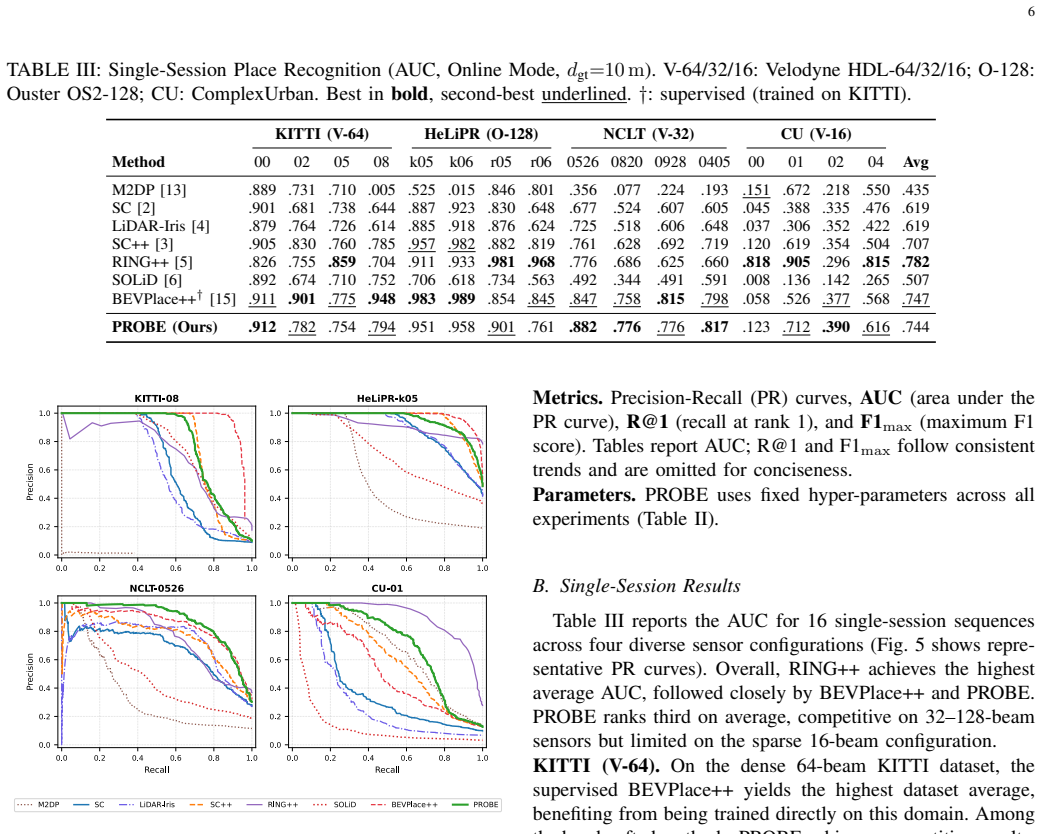
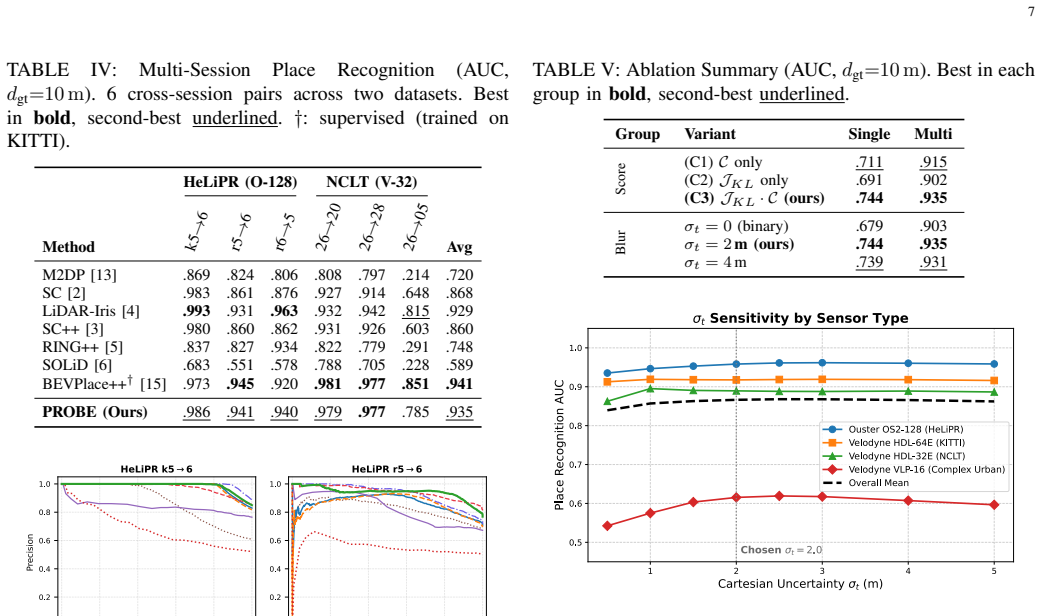
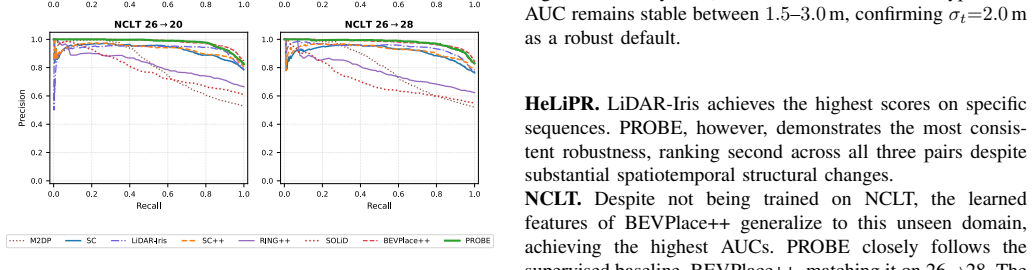
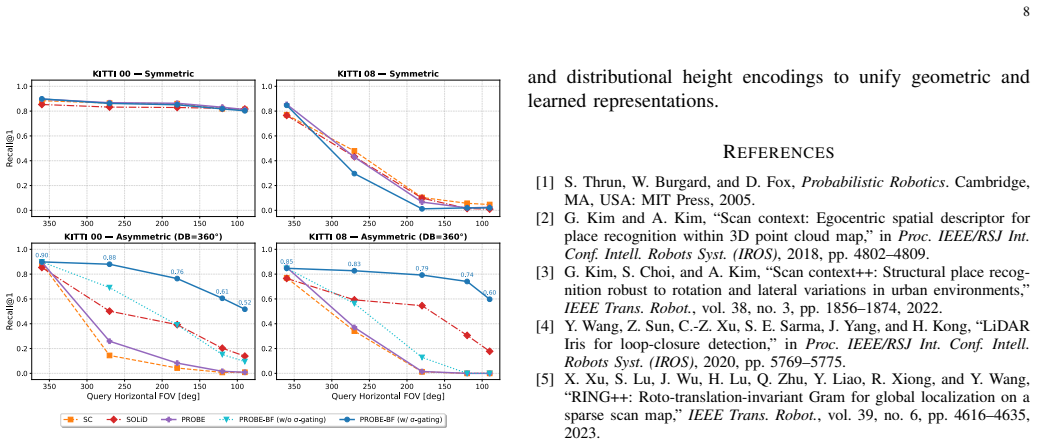
- Highest accuracy among handcrafted descriptors on multi-session place recognition across four LiDAR types
- Competitive single-session performance relative to both handcrafted and supervised baselines
- O(R S) runtime from closed-form marginalization instead of discrete sampling
- Reduced per-dataset tuning because sigma_t is treated as a sensor-independent physical quantity
- Rotation alignment via FFT height cosine similarity combined with Bernoulli-KL Jaccard and uncertainty gating
Where Pith is reading between the lines
- The Bernoulli model could be extended to handle partial occlusions or moving objects by adding a time-dependent occupancy prior
- Analytical translation robustness may lower the data-augmentation burden when training learned descriptors on the same grids
- Cross-sensor generalization from a meter-based parameter suggests the descriptor could serve as a drop-in module for fusion with camera or radar place recognition pipelines
Load-bearing premise
A single fixed value of sigma_t in meters captures the dominant translational uncertainty across different LiDAR sensors and environments without needing per-dataset adjustment.
What would settle it
On a held-out multi-session dataset collected with a new LiDAR type and larger typical translation errors, PROBE accuracy falls below the best competing handcrafted descriptor when sigma_t is held at the value tuned on prior datasets.
Figures


read the original abstract
We present PROBE (PRobabilistic Occupancy BEV Encoding), a learning-free LiDAR place recognition descriptor that models each BEV cell's occupancy as a Bernoulli random variable. Rather than relying on discrete point-cloud perturbations, PROBE analytically marginalizes over continuous Cartesian translations via the polar Jacobian, yielding a distance-adaptive angular uncertainty $\sigma_\theta = \sigma_t / r$ in $\mathcal{O}(R{\cdot}S)$ time. The primary parameter $\sigma_t$ represents the expected translational uncertainty in meters, a sensor-independent physical quantity that enhances cross-sensor generalization while reducing the need for extensive per-dataset tuning. Pairwise similarity combines a Bernoulli-KL Jaccard with exponential uncertainty gating and FFT-based height cosine similarity for rotation alignment. Evaluated on four datasets spanning four diverse LiDAR types, PROBE achieves the highest accuracy among handcrafted descriptors in multi-session evaluation and competitive single-session performance relative to both handcrafted and supervised baselines. The source code and supplementary materials are available at https://sites.google.com/view/probe-pr.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces PROBE, a learning-free LiDAR place recognition descriptor that models BEV cell occupancy as Bernoulli random variables. It analytically marginalizes continuous Cartesian translations via the polar Jacobian to produce a distance-dependent angular uncertainty σ_θ = σ_t / r in O(R·S) time. Pairwise similarity is formed from a Bernoulli-KL Jaccard term, exponential uncertainty gating, and FFT-based height cosine similarity. Experiments across four datasets with distinct LiDAR sensors report that PROBE attains the highest accuracy among handcrafted descriptors in multi-session evaluation and competitive performance against both handcrafted and supervised baselines in single-session settings.
Significance. If the analytical marginalization and single-parameter generalization claims hold, the work provides a meaningful contribution to handcrafted 3D place recognition by delivering a computationally efficient, physically motivated descriptor that reduces dataset-specific tuning and supports cross-sensor deployment. The explicit release of source code and supplementary materials strengthens reproducibility and enables direct comparison with learning-based alternatives.
minor comments (3)
- [§5] The experimental section should explicitly state the single value (or narrow range) chosen for σ_t across all four LiDAR datasets and report whether any per-dataset adjustment was performed; this directly supports the sensor-independence claim.
- [§5.2] Table 2 (or equivalent multi-session results table) would benefit from reporting the number of query-database pairs and the exact recall@1 / recall@5 metrics with standard deviation across sessions to allow assessment of statistical robustness.
- [§3.3] The complexity analysis states O(R·S) but does not clarify how the FFT-based rotation alignment scales with the number of discrete angles; a brief note on the angular discretization step would improve clarity.
Simulated Author's Rebuttal
We thank the referee for their positive assessment of PROBE and for recommending minor revision. The summary correctly captures the core technical contributions of analytical marginalization via the polar Jacobian and the single-parameter generalization via σ_t. We provide responses below to the points raised.
Circularity Check
Derivation is self-contained; no circular reductions identified
full rationale
The paper defines a handcrafted descriptor by modeling BEV cell occupancy as independent Bernoulli random variables, then analytically marginalizes continuous Cartesian translations using the polar Jacobian to obtain distance-dependent angular uncertainty σ_θ = σ_t / r. This step is a direct mathematical transformation with O(R·S) complexity and does not depend on fitting parameters to the place-recognition accuracy metrics or on self-referential definitions. The composite similarity (Bernoulli-KL Jaccard, uncertainty gating, FFT height cosine) is assembled from these quantities without invoking self-citations, uniqueness theorems, or prior author results that would force the form. σ_t is introduced as a fixed sensor-independent physical constant; no equation or procedure in the text reduces the reported performance to a data-driven fit of σ_t itself. The construction therefore remains independent of the evaluation outcomes it produces.
Axiom & Free-Parameter Ledger
free parameters (1)
- sigma_t
axioms (2)
- domain assumption Occupancy of each BEV cell is modeled as a Bernoulli random variable.
- standard math Continuous Cartesian translations can be analytically marginalized using the polar Jacobian to yield distance-adaptive angular uncertainty.
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
PROBE analytically marginalizes over continuous Cartesian translations via the polar Jacobian, yielding a distance-adaptive angular uncertainty σ_θ = σ_t / r
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
models each BEV cell's occupancy as a Bernoulli random variable
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.