Minimax Optimal Variance-Aware Regret Bounds for Multinomial Logistic MDPs
Pith reviewed 2026-05-20 04:52 UTC · model grok-4.3
The pith
Multinomial logistic MDPs admit a variance-aware regret of order d H squared times average variance times square root T, with a matching lower bound.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The authors introduce the normalized average variance bar sigma_T of the optimal downstream value function along the learner's trajectory and show that an appropriately designed algorithm attains regret tilde O(d H^2 bar sigma_T sqrt(T)). This quantity is at most 1/2 and can be much smaller under structure; for example it equals O(H^{-1}) in KL-constrained robust MDPs, which removes a full factor of H from the horizon dependence. They also prove a matching Omega(d H^2 bar sigma_T sqrt(T)) lower bound, demonstrating minimax optimality up to logs.
What carries the argument
The normalized average variance bar sigma_T of the optimal downstream value function along the learner's trajectory, which scales the leading term in both the upper and lower regret bounds.
If this is right
- In KL-constrained robust MDPs the horizon dependence of the regret improves from H^2 to H.
- The new bound recovers the existing worst-case guarantee whenever bar sigma_T is bounded away from zero.
- The minimax regret complexity of the entire class of MNL mixture MDPs is now characterized up to logs.
- Algorithms that ignore variance information are provably suboptimal on structured instances.
Where Pith is reading between the lines
- Analogous variance quantities could be defined and exploited for regret adaptation in other parametric MDP families.
- In applied settings one could attempt to estimate bar sigma_T from observed trajectories to forecast the realized regret.
- The same technique may extend to infinite-horizon or continuous-state problems once a suitable trajectory-averaged variance can be defined.
Load-bearing premise
Transitions must be generated exactly by a multinomial logistic model and the average variance of the optimal value function must be a well-defined, non-circular constant that can be used directly in the analysis.
What would settle it
An explicit construction of an MNL MDP in which any algorithm incurs regret that exceeds the proposed upper bound by more than logarithmic factors, or in which the lower-bound instance fails to force the claimed Omega rate.
Figures


read the original abstract
We study reinforcement learning for episodic Markov Decision Processes (MDPs) whose transitions are modelled by a multinomial logistic (MNL) model. Existing algorithms for MNL mixture MDPs yield a regret of $\smash{\tilde{O}(dH^2\sqrt{T})}$ (Li et al., 2024), where $d$ is the feature dimension, $H$ the episode length, and $T$ the number of episodes. Inspired by the logistic bandit literature (Abeille et al., 2021; Faury et al., 2022; Boudart et al., 2026), we introduce a problem-dependent constant $\bar\sigma\_T \leq 1/2$, measuring the normalised average variance of the optimal downstream value function along the learner's trajectory. We propose an algorithm achieving a regret of $\smash{\tilde{O}(dH^2\bar\sigma\_T\sqrt{T})}$, which recovers the existing bound in the worst case and improves upon it for structured MDPs. For instance, for KL-constrained robust MDPs, $\bar\sigma\_T = O(H^{-1})$, reducing the horizon dependence by a factor $H$. We further establish a matching $\smash{\Omega(dH^2\bar\sigma\_T\sqrt{T})}$ lower bound, proving minimax optimality (up to logarithmic factors) and fully characterising the regret complexity of MNL mixture MDPs for the first time.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper studies reinforcement learning for episodic Markov Decision Processes (MDPs) whose transitions are modelled by a multinomial logistic (MNL) model. It introduces a problem-dependent constant bar sigma_T measuring the normalised average variance of the optimal downstream value function along the learner's trajectory. The authors propose an algorithm achieving a regret of tilde O(d H^2 bar sigma_T sqrt(T)), which recovers the existing bound in the worst case and improves upon it for structured MDPs such as KL-constrained robust MDPs where bar sigma_T = O(H^{-1}). They further establish a matching Omega(d H^2 bar sigma_T sqrt(T)) lower bound, proving minimax optimality up to logarithmic factors.
Significance. If the central claims hold, this work provides the first minimax-optimal characterization of regret complexity for MNL MDPs, extending logistic bandit variance techniques to the MDP setting. The variance-aware improvement that can reduce horizon dependence is a clear strength, as is the matching lower bound that fully pins down the complexity. This could guide algorithm design in structured RL environments where variance is low.
major comments (2)
- [Main upper-bound theorem] The upper bound in the main theorem uses bar sigma_T defined as the normalized average variance of the optimal value function along the realized trajectory generated by the algorithm itself. The proof must contain an explicit argument (e.g., a self-bounding step or uniform concentration that does not presuppose small regret) showing that the claimed adaptive improvement is not conditional on post-hoc evaluation of this quantity.
- [Lower bound section] In the lower-bound construction, confirm that the hard instance achieves Omega(d H^2 bar sigma_T sqrt(T)) for the identical definition of bar sigma_T used in the upper bound; otherwise the minimax-optimality claim for the variance-aware quantity would not be tight.
minor comments (2)
- [Abstract] The citation 'Boudart et al., 2026' in the abstract appears forward-dated; please correct or clarify the reference.
- [Introduction] Add a short remark in the introduction or preliminaries clarifying whether the algorithm requires knowledge of bar sigma_T or achieves the bound in a fully adaptive manner.
Simulated Author's Rebuttal
We thank the referee for their constructive comments, which help clarify the presentation of our variance-aware bounds. We address each major comment below and describe the corresponding revisions.
read point-by-point responses
-
Referee: [Main upper-bound theorem] The upper bound in the main theorem uses bar sigma_T defined as the normalized average variance of the optimal value function along the realized trajectory generated by the algorithm itself. The proof must contain an explicit argument (e.g., a self-bounding step or uniform concentration that does not presuppose small regret) showing that the claimed adaptive improvement is not conditional on post-hoc evaluation of this quantity.
Authors: We agree that an explicit non-circular argument is required. The proof of the main upper-bound theorem already employs a uniform concentration inequality that holds over the distribution of trajectories induced by the algorithm (see the analysis following Lemma 3), which bounds the realized variance term without presupposing small regret. This yields the adaptive improvement directly. To address the concern explicitly, we will insert a dedicated self-bounding lemma in the revised version that isolates this step and shows how the regret is controlled in terms of the realized bar sigma_T. revision: yes
-
Referee: [Lower bound section] In the lower-bound construction, confirm that the hard instance achieves Omega(d H^2 bar sigma_T sqrt(T)) for the identical definition of bar sigma_T used in the upper bound; otherwise the minimax-optimality claim for the variance-aware quantity would not be tight.
Authors: In the lower-bound construction, the hard instance is built so that bar sigma_T is defined identically to the upper bound: it is the normalized average variance of the optimal downstream value function along the trajectory taken by any learner. We explicitly compute this quantity for the constructed family of MDPs and verify that it produces the matching Omega(d H^2 bar sigma_T sqrt(T)) term. We will add a short remark in the revised manuscript that directly equates the two definitions and recomputes bar sigma_T on the hard instance to make the tightness transparent. revision: yes
Circularity Check
No significant circularity; variance term is a valid problem-dependent quantity
full rationale
The paper defines bar sigma_T explicitly as the normalized average variance of the optimal downstream value function along the realized trajectory and derives both an upper bound of tilde O(d H^2 bar sigma_T sqrt(T)) and a matching lower bound. This is a standard construction for adaptive, variance-aware regret bounds that recover the worst-case result when bar sigma_T is order-1 and improve when the MDP structure makes the quantity smaller (e.g., KL-constrained robust MDPs). The derivation does not reduce any claimed prediction or theorem to a fitted parameter or self-citation by construction; bar sigma_T is treated as an exogenous problem constant in the analysis, and the bounds are stated to hold with this quantity. Self-citations to prior logistic-bandit work are inspirational rather than load-bearing for the central minimax result. The theoretical guarantee is therefore self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Transitions are generated by a multinomial logistic model
- standard math Standard regret analysis and concentration inequalities from cited logistic bandit works apply
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
We introduce a problem-dependent constant σ_T ... normalised average variance of the optimal downstream value function
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
S. Filippi, O. Cappé, and A. Garivier. Optimism in reinforcement learning and kullback-leibler divergence. In 2010 48th Annual Allerton Conference on Communication, Control, and Computing (Allerton), pages 115–122. IEEE,
work page 2010
-
[2]
J. Lee and M.-h. Oh. Improved online confidence bounds for multinomial logistic bandits. arXiv preprint arXiv:2502.10020,
-
[3]
J. Li, W. Monroe, A. Ritter, D. Jurafsky, M. Galley, and J. Gao. Deep reinforcement learning for dialogue generation. In Proceedings of the 2016 conference on empirical methods in natural language processing, pages 1192–1202,
work page 2016
- [4]
- [5]
-
[6]
10 A PREPRINT - MAY 20, 2026 R. S. Sutton, A. G. Barto, et al. Reinforcement learning: An introduction, volume
work page 2026
-
[7]
11 A PREPRINT - MAY 20, 2026 APPENDIX This appendix is organised as follows: - Appendix A: Notations - Appendix B: Analysis of Algorithm 2 - Appendix C: Proof of Theorem 4 – Lower bound - Appendix D: KL-Constrained Robust MDPs - Appendix E: Bound on σT under an optimal policy π∗ - Appendix F: Experiments - Appendix G: Auxiliary Result A Notations We detai...
work page 2026
-
[8]
p d log(tH/δ) + (1 +t)1/4 κ ρ 3/2 d log 1 + t d # =: β0 t (δ) . Proof. Step 1: Intermediate Confidence Set. Sincebθτ+1,h minimises eLt,h(θ) we have Gτ+1,h(bθτ+1,h) = 0d. Using the triangle inequality we get: Gτ+1,h(θ∗ h) − Gτ+1,h(bθτ+1,h) W −1 τ +1,h(θ∗ h) ≤ τX t=1 X s′∈St,h (ps′ t,h(θ∗ h) − ys′ t,h)ϕs′ t,h W −1 τ +1,h(θ∗ h) + p λ0B + τX t=1 ∥ϕ(es′ t,h|es...
work page 2022
-
[9]
We bound the last term using a Trace-Determinant argument
p d log(τ H/δ) . We bound the last term using a Trace-Determinant argument. We start by applying the triangle inequality. τX t=1 ∥ϕ(es′ t,h|est,h, at,h)∥ eU −1 t+1,h p es′ t,h est,h,at,h (θ∗ h) − 1 ϕ(es′ t,h|est,h, at,h) U −1 τ +1,h(θ∗ h) ≤ τX t=1 ∥ϕ(es′ t,h|est,h, at,h)∥ eU −1 t+1,h p es′ t,h est,h,at,h (θ∗ h) − 1 ϕ(es′ t,h|est,h, at,h) U −1 τ +1,h(θ∗ h)...
work page 2026
-
[10]
Step 2: Convex Relaxation with Self-Concordance
p d log(τ H/δ) + (1 +τ)1/4 κ ρ 3/2 d log 1 + τ d . Step 2: Convex Relaxation with Self-Concordance. As pointed out by Abeille et al. (2021, Section 6), the set θ ∈ Rd : Gτ+1,h(θ) − Gτ+1,h(bθτ+1,h) W −1 τ +1,h(θ) ≤ β0 is not convex. Thus we need to build a convex relaxation of it. Let us define Gt,h(θ1, θ2) := Z 1 0 ∇2eLt,h(θ1 + v(θ2 − θ1))dv . Hence we ha...
work page 2021
-
[11]
By leveraging the self-concordance property twice (Sun and Tran-Dinh, 2019, Corollary
show that the objective function eLτ+1,h is 3 √ 2-self-concordant. By leveraging the self-concordance property twice (Sun and Tran-Dinh, 2019, Corollary
work page 2019
-
[12]
p d log((τ + 1)H/δ) + (τ + 2)1/4 κ ρ 3/2 d log 1 + τ+1 d (4) and τ := 45 κ ρ 8 (1 + 3 √ 2)4d6(B + 3)2 log T H δ log 1 + T d 6 . Then the sets (Θh)H h=1 returned by Algorithm 1 satisfy with probability 1 − δ θ∗ h ∈ Θh and diamA,S,h(Θh) ≤ 1 3 √ 2 for all h ∈ JHK . 14 A PREPRINT - MAY 20, 2026 Proof. Fix h ∈ JHK. We start by applying the Cauchy-Schwarz inequ...
work page 2026
-
[13]
τX t=1 max a∈A max s∈S max s′∈Sh,s,a ∥ϕ(s′|s, a)∥2 eU −1 t,h #1/2 ≤ 2β0 τ(δ)τ −1/2
= 2β0 τ(δ) max a∈A max s∈S max s′∈Sh,s,a ∥ϕ(s′|s, a)∥2 A−1 τ +1,h 1/2 = 2β0 τ(δ)τ −1/2 " τX t=1 max a∈A max s∈S max s′∈Sh,s,a ∥ϕ(s′|s, a)∥2 A−1 τ +1,h #1/2 . We now use that Aτ+1,h ≽ eUt,h for all t ∈ Jτ K and the definition of (est,h, at,h,es′ t,h) to get diam(Θh) ≤ 2β0 τ(δ)τ −1/2 " τX t=1 max a∈A max s∈S max s′∈Sh,s,a ∥ϕ(s′|s, a)∥2 eU −1 t,h #1/2 ≤ 2β0 ...
work page 2022
-
[14]
Extending the analysis to continuous action spaces, where the suboptimality gap may approach zero, is left for future work. By construction, any action maximising the combined Q-value and variance must strictly belong to A∗ h(s). Thus, we can choose an optimal policy π∗ defined as: π∗ h(s) ∈ arg max a∈A∗ h(s) νmaxQ∗ h(s, a) + Vars′∼p∗ h(·|s,a) V ∗ h+1(s′)...
work page 2026
-
[15]
Set hyperparameters τ, λ0 as in Lemma 1 and λ = 144 d
[Regret Bound] Let δ ∈]0, 1]. Set hyperparameters τ, λ0 as in Lemma 1 and λ = 144 d. Then, with probability at least 1 − 5δ, the regret of Algorithm 2 satisfies: RegT ≤ eO BdH 2σT √ T log δ−1 , where eO(·) hides logarithmic factors in T and lower-order terms. More precisely, the exact upper bound is given by: RegT ≤4 √ 2eBdH 2σT √ T log(1 + T ) p log(T /δ...
work page 2026
-
[16]
By substituting into Equation (8) we obtain Γt,h ubqt h,st,h,πt,h(st,h) = Γt,h up∗ h,st,h,πt,h(st,h) + 2βt(δ) X s′∈St,h ps′ st,h,at,h(θ∗ h) V ∗ t,h+1(s′) − Es′′∼p∗ V ∗ t,h+1(s′′) 2 1/2 X s′∈St,h ps′ st,h,at,h(θ∗ h)∥ϕs′ st,h,at,h − ϕt,h∥2 H−1 t,h 1/2 + 1 2 ubqt h,st,h,πt,h(st,h) − up∗ h,st,h,πt,h(st,h) ⊤ ∇2Γt,h uh,st,h,πt,h(st,h) ubqt h,st,h...
work page 2026
-
[17]
Thus for all t, h ≥ 1, we have ϕs′ s,a − ϕt,h 2 H−1 t,h ≤ e ϕs′ s,a − ϕt,h 2 H−1 t,h(θ∗ h) . We sum over T and get: TX t=1 HX h=1 X s′∈St,h p∗ h(s′|st,h, πt,h(st,h)) ϕs′ s,a − ϕt,h 2 H−1 t,h ≤ e TX t=1 HX h=1 X s′∈St,h p∗ h(s′|st,h, πt,h(st,h)) ϕs′ s,a − ϕt,h 2 H−1 t,h(θ∗ h) . We apply (Li et al., 2024, Lemma 6 (I)) and get TX t=1 HX h=1 X s′∈St,h p∗ h(s′...
work page 2024
-
[18]
Then for any algorithm, there exists an MNL mixture MDP such that E [RegT ] ≥ Ω BdH 2σT √ T
Suppose that d ≥ 2, H ≥ 3, T ≥ {(d − 1)2H/2, (d − 1)2H3/32}. Then for any algorithm, there exists an MNL mixture MDP such that E [RegT ] ≥ Ω BdH 2σT √ T . 24 A PREPRINT - MAY 20, 2026 Proof. We show that the instance of MNL mixture MDP we introduced leads to σ2 T upper bounded by 1/H. Note that for any h ≥ 2 the current state is either sh or sH+2. Because...
work page 2026
-
[19]
4 √ 2HT ≤ 2 H where the first inequality is due to (Park et al., 2024, Equation (10)), the second equality to (Park et al., 2024, Lemma G.1) and the last inequality is due to T ≥ (d − 1)2H3/32. Consequently, by substituting into Equation (12), we can upper bound the problem-dependent constant σT by: σT ≤ vuut(T H)−1 TX t=1 HX h=1 2 H = √ 2H −1/2 . (13) Mo...
work page 2024
-
[20]
25 A PREPRINT - MAY 20, 2026 Proposition
work page 2026
-
[21]
26 A PREPRINT - MAY 20, 2026 Proof
For any MNL mixture MDP , the problem-dependentσT under an optimal policy π∗ is bounded by Eπ∗[σ2 T ] ≤ 1 4H . 26 A PREPRINT - MAY 20, 2026 Proof. Let G :=PH h=1 rh(sh, ah) be the total return of a trajectory (sh, ah)h. By Popoviciu’s inequality we have Varπ∗,p∗[G] ≤ H2 4 . (14) Under π∗ and p∗, the process Mh := V ∗ h (sh) +P j<h rj(sj, aj) is a martinga...
work page 2026
-
[22]
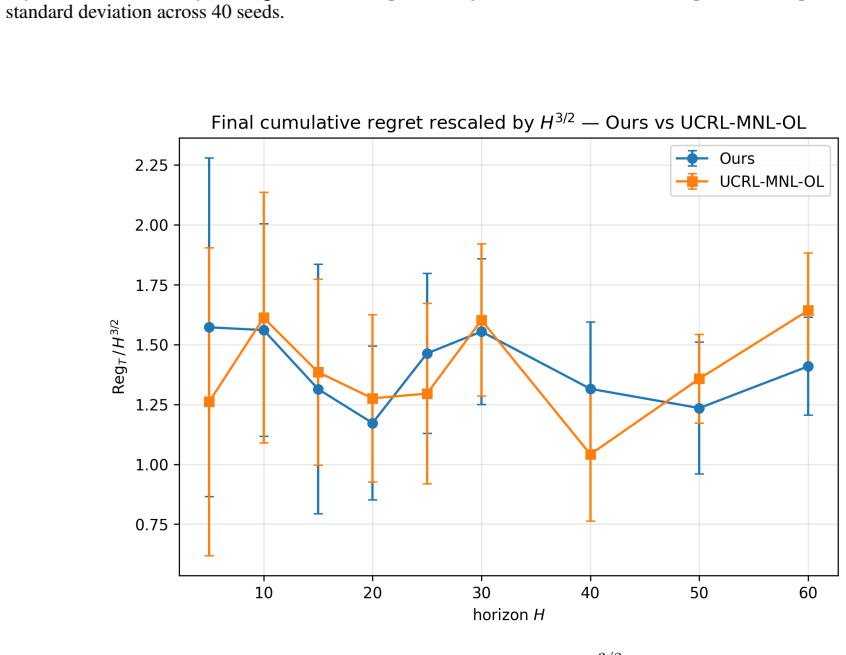
We also shrink the size of the confidence ellipsoid Ct,h(δ) by introducing a scale parameter beta_scale = 0.01 and set eβt = beta_scale(( 2 3 d log(t/δ))1/2 + 24B √ d). To tackle the non-concave maximisation problem in the optimistic reward definition (see Equation(5)), we employ the Frank-Wolfe algorithm to find a local optimum within the confidence set....
work page 2024
-
[23]
28 A PREPRINT - MAY 20, 2026 Proof
For any N ≥ 1 and q ∈]0, 1[, we have N − 1 − (1 − q) N −1X k=0 qk(N − 1 − k) = 1 − qN 1 − q − 1 . 28 A PREPRINT - MAY 20, 2026 Proof. Let N ≥ 1 and q ∈]0, 1[. We define S :=PN −1 k=0 qk(N − 1 − k). We have S − qS = N −1X k=1 [(N − 1 − k) − (N − 1 − (k − 1))] + N − 1 = − N −1X k=1 qk + N − 1 (1 − q)S = −q 1 − qN −1 1 − q + N − 1 . Thus we get N − 1 − (1 − ...
work page 2026
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.