MC-Risk: Multi-Component Risk Fields for Risk Identification and Motion Planning
Pith reviewed 2026-05-21 03:27 UTC · model grok-4.3
The pith
MC-Risk builds a bird's-eye risk map by linearly adding three separate fields for cars, vulnerable road users, and road rules to localize hazards earlier than prior single-component methods.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
MC-Risk is formed by linearly composing a motorized-agent field that merges a black-box multimodal trajectory predictor with an analytic Gaussian-torus whose width grows with speed and curvature, a forward-biased anisotropic kernel for vulnerable road users aligned to heading and speed, and a road penalty field that applies off-road costs plus lane-aware exposure using full HD-map topology. On RiskBench's collision subset this construction yields the highest overall risk localization scores and the earliest hazard indication among compared methods, while the same field serves directly as an MPC cost density to generate risk-aware trajectories without additional training.
What carries the argument
Linear composition on a bird's-eye-view grid of three modules: motorized-agent field (black-box predictor fused with analytic Gaussian-torus), VRU forward-biased anisotropic kernel, and HD-map road penalty field.
If this is right
- The combined field achieves the best overall risk localization on the collision subset of RiskBench.
- It supplies the earliest hazard indication among the evaluated approaches.
- The field can be used directly as a cost density inside model predictive control to produce risk-aware trajectories.
- No separate training step is required to turn the risk field into a planning cost.
- The three modules keep risk signals interpretable and separated by agent class.
Where Pith is reading between the lines
- The modular design could let developers swap or tune one component, such as the VRU kernel, without retraining the entire system when new user types appear.
- Analytic pieces mixed with a black-box predictor may reduce the amount of labeled collision data needed compared with fully learned risk estimators.
- The same linear composition could be tested as an add-on layer on top of existing end-to-end planners rather than as a replacement cost.
- Extending the road penalty module to include traffic-signal states would be a direct next measurement of whether the framework scales to richer map data.
Load-bearing premise
The assumption that adding the motorized-agent, VRU, and road fields linearly produces a single calibrated and class-aware risk value whose advantage on the tested benchmark holds for other predictors and driving scenes.
What would settle it
A new risk-field method that records higher localization accuracy or earlier detection times than MC-Risk when both are evaluated on exactly the same RiskBench collision subset would falsify the performance claim.
Figures




read the original abstract
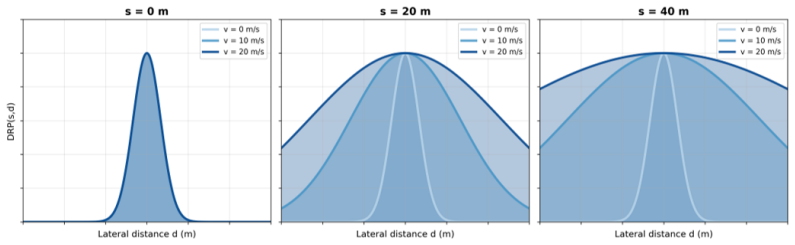
We present MC-Risk, a planner-aligned, multi-component risk field on a bird's-eye-view grid that yields early, calibrated, and class-aware risk localization. MC-Risk linearly composes three interpretable modules: (i) a motorized-agent field that fuses a black-box multimodal trajectory predictor with an analytic Gaussian-torus construction whose lateral width grows with speed/curvature and whose height attenuates with look-ahead; (ii) a VRU risk field that replaces isotropic pedestrian blobs with a forward-biased anisotropic kernel aligned to heading and speed; and (iii) a road penalty field that exploits full HD-map topology, imposing an off-road penalty and lane-aware risk exposure for same/opposite directions. We conduct, to our knowledge, the first standardized quantitative evaluation of a risk-field formulation on RiskBench's collision subset. MC-Risk attains the best overall risk localization and the earliest hazard indication. Finally, we demonstrate a plug-and-play planning interface by using the field as an MPC cost density, enabling risk-aware trajectory generation without additional training.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents MC-Risk, a planner-aligned multi-component risk field on a bird's-eye-view grid. It linearly composes (i) a motorized-agent field fusing a black-box multimodal trajectory predictor with an analytic Gaussian-torus (lateral width grows with speed/curvature, height attenuates with look-ahead), (ii) a forward-biased anisotropic VRU kernel, and (iii) an HD-map road penalty field imposing off-road and lane-aware penalties. The work reports the first standardized quantitative evaluation on RiskBench's collision subset, claiming best overall risk localization and earliest hazard indication, and demonstrates direct use of the field as an MPC cost density for risk-aware trajectory generation without additional training.
Significance. If the performance claims hold after proper controls, MC-Risk would supply an interpretable, class-aware risk representation that integrates directly into existing planners. The standardized RiskBench evaluation and the plug-and-play MPC interface are practical strengths that could aid reproducibility and adoption in motion planning research.
major comments (2)
- [Experiments] Experiments section: the reported superiority on RiskBench's collision subset is not supported by ablations that replace the black-box predictor with a weaker or null predictor, or that remove the analytic Gaussian-torus and VRU components. Without these controls or a predictor-only baseline, it remains unclear whether the gains in risk localization and hazard indication arise from the proposed linear multi-component fusion or simply from the quality of the chosen external predictor. This directly affects the central claim that MC-Risk attains the best overall performance.
- [Method] Method section, motorized-agent field construction: the linear sum of the three fields lacks an explicit normalization or scale-calibration step. When the black-box predictor outputs and the analytic Gaussian-torus have differing magnitudes, the composite field may not remain comparable across scenes, undermining the claim of a calibrated, class-aware risk field.
minor comments (2)
- [Abstract] The abstract asserts 'best overall' results without quantitative metrics, error bars, or explicit baseline names; these details should appear in the main evaluation section with tables.
- [Method] Notation for the free parameters (lateral width growth rate, height attenuation) should be introduced with symbols and ranges in the method section for reproducibility.
Simulated Author's Rebuttal
We thank the referee for the constructive comments. We address each major comment below and describe the revisions that will be made to the manuscript.
read point-by-point responses
-
Referee: [Experiments] Experiments section: the reported superiority on RiskBench's collision subset is not supported by ablations that replace the black-box predictor with a weaker or null predictor, or that remove the analytic Gaussian-torus and VRU components. Without these controls or a predictor-only baseline, it remains unclear whether the gains in risk localization and hazard indication arise from the proposed linear multi-component fusion or simply from the quality of the chosen external predictor. This directly affects the central claim that MC-Risk attains the best overall performance.
Authors: We agree that the current evaluation lacks the requested controls and that this weakens attribution of the reported gains. In the revised manuscript we will add a predictor-only baseline, a null-predictor variant (constant or uniform field), and component-wise ablations that disable the Gaussian-torus, the VRU kernel, and the road-penalty field in turn. These new results will be reported on the same RiskBench collision subset and will clarify the incremental benefit of the linear multi-component construction. revision: yes
-
Referee: [Method] Method section, motorized-agent field construction: the linear sum of the three fields lacks an explicit normalization or scale-calibration step. When the black-box predictor outputs and the analytic Gaussian-torus have differing magnitudes, the composite field may not remain comparable across scenes, undermining the claim of a calibrated, class-aware risk field.
Authors: We acknowledge that the original linear summation relies on empirically chosen weights without an explicit per-scene normalization step. This can indeed lead to magnitude inconsistencies. We will revise the Method section to insert a normalization stage (scene-wise min-max scaling of each component to [0,1] before weighted summation) and will document the resulting calibration procedure. The revised formulation will be used for all reported experiments. revision: yes
Circularity Check
No significant circularity in MC-Risk construction or RiskBench evaluation.
full rationale
The paper constructs MC-Risk via explicit linear composition of three modules whose definitions are independent of the target performance metric: (i) motorized-agent field fusing an external black-box multimodal predictor with a separately specified analytic Gaussian-torus whose width/height rules are given directly, (ii) VRU field defined by an anisotropic kernel aligned to heading/speed, and (iii) road penalty derived from HD-map topology. The headline claims of superior risk localization and earliest hazard indication on RiskBench's collision subset are obtained by direct quantitative comparison against that external benchmark, with no reported parameter fitting to the test set, no self-referential re-use of the same data as both input and output, and no load-bearing self-citation that would collapse the result to a prior result by the same authors. The derivation chain therefore remains self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
free parameters (2)
- lateral width growth rate with speed/curvature
- height attenuation with look-ahead distance
axioms (1)
- domain assumption Linear composition of the three modules yields a calibrated and superior risk field
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
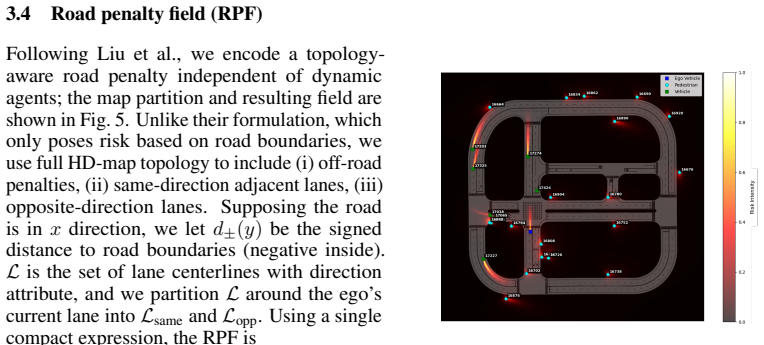
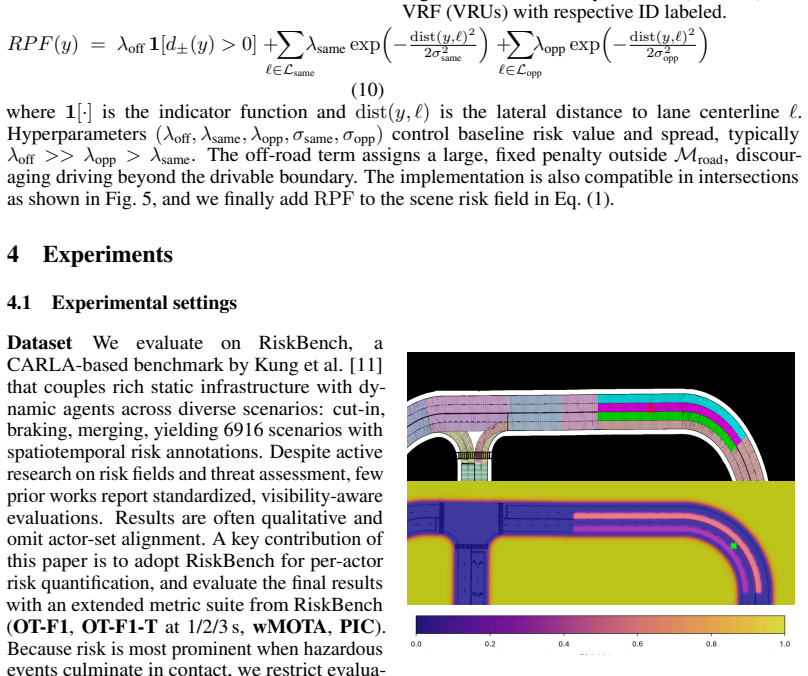
Rscene(x, y) = Σ MAFi(x, y) + Σ VRFk(x, y) + RPF(x, y) … Gaussian-torus construction … forward-biased anisotropic kernel … topology-aware road penalty
-
IndisputableMonolith/Foundation/BranchSelection.leanbranch_selection unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
velocity-variant lateral dispersion … σ(s) = (b + k κpt)s + kv |v(s)| + c
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
D. Nistér, H.-L. Lee, J. Ng, and Y . Wang, “The safety force field,”NVIDIA White Paper, vol. 15, 2019
work page 2019
-
[2]
Driving safety field theory modeling and its application in pre-collision warning system,
J. Wang, J. Wu, X. Zheng, D. Ni, and K. Li, “Driving safety field theory modeling and its application in pre-collision warning system,”Transportation research part C: emerging technologies, vol. 72, pp. 306–324, 2016
work page 2016
-
[3]
The driving safety field based on driver–vehicle–road interactions,
J. Wang, J. Wu, and Y . Li, “The driving safety field based on driver–vehicle–road interactions,”IEEE Transactions on Intelligent Transportation Systems, vol. 16, no. 4, pp. 2203–2214, 2015
work page 2015
-
[4]
Research on local path planning of unmanned vehicles based on improved driving risk field,
P. Liu, Y . Chang, J. Gao, G. Du, Z. Su, M. Liu, and W. Liu, “Research on local path planning of unmanned vehicles based on improved driving risk field,”Scientific Reports, vol. 14, no. 1, p. 29153, 2024
work page 2024
-
[5]
Risk-aware vehicle trajectory prediction under safety-critical scenarios,
Q. Wang, D. Xu, G. Kuang, C. Lv, S. E. Li, and B. Nie, “Risk-aware vehicle trajectory prediction under safety-critical scenarios,”IEEE Transactions on Intelligent Transportation Systems, 2025
work page 2025
-
[6]
J. Li, X. Wang, and T. Zhang, “A spatiotemporal learning approach to safety-oriented individualized driving risk assessment in a vehicle-to-everything (v2x) environment,”IET Intelligent Transport Systems, vol. 18, no. 12, pp. 2459–2484, 2024
work page 2024
-
[7]
Real-time driving risk assessment using deep learning with xgboost,
L. Shi, C. Qian, and F. Guo, “Real-time driving risk assessment using deep learning with xgboost,”Accident Analysis & Prevention, vol. 178, p. 106836, 2022. [Online]. Available: https://www.sciencedirect.com/science/article/pii/S0001457522002718
work page 2022
-
[8]
H. Hu, Q. Wang, M. Cheng, and Z. Gao, “Cost-sensitive semi-supervised deep learning to assess driving risk by application of naturalistic vehicle trajectories,”Expert Systems with Applications, vol. 178, p. 115041, 2021. [Online]. Available: https://www.sciencedirect.com/science/article/pii/S0957417421004826
work page 2021
-
[9]
Ghostvit: Expediting vision transformers via cheap operations,
H. Cao, Z. Qu, G. Chen, X. Li, L. Thiele, and A. Knoll, “Ghostvit: Expediting vision transformers via cheap operations,”IEEE Transactions on Artificial Intelligence, vol. 5, no. 6, pp. 2517–2525, 2024
work page 2024
-
[10]
Edrf: Enhanced driving risk field based on multimodal trajectory prediction and its applications,
J. Jiang, Z. Han, Y . Wang, M. Cai, Q. Meng, Q. Xu, and J. Wang, “Edrf: Enhanced driving risk field based on multimodal trajectory prediction and its applications,” in2024 IEEE 27th International Conference on Intelligent Transportation Systems (ITSC). IEEE, 2024, pp. 2287–2293
work page 2024
-
[11]
Riskbench: A scenario-based benchmark for risk identification,
C.-H. Kung, C.-C. Yang, P.-Y . Pao, S.-W. Lu, P.-L. Chen, H.-C. Lu, and Y .-T. Chen, “Riskbench: A scenario-based benchmark for risk identification,” in2024 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2024, pp. 14 800–14 807
work page 2024
-
[12]
Jansson,Collision avoidance theory with application to automotive collision mitigation
J. Jansson,Collision avoidance theory with application to automotive collision mitigation. Linkopings Universitet (Sweden), 2005
work page 2005
-
[13]
Near miss determination through use of a scale of danger,
J. C. Hayward, “Near miss determination through use of a scale of danger,” 1972
work page 1972
-
[14]
Extended time-to-collision measures for road traffic safety assessment,
M. M. Minderhoud and P. H. Bovy, “Extended time-to-collision measures for road traffic safety assessment,” Accident Analysis & Prevention, vol. 33, no. 1, pp. 89–97, 2001
work page 2001
-
[15]
Analysis of traffic conflicts and collisions,
B. L. Allen, B. T. Shin, and P. J. Cooper, “Analysis of traffic conflicts and collisions,” Tech. Rep., 1978
work page 1978
-
[16]
Probabilistic uncertainty-aware risk spot detector for naturalistic driving,
T. Puphal, M. Probst, and J. Eggert, “Probabilistic uncertainty-aware risk spot detector for naturalistic driving,”IEEE Transactions on Intelligent Vehicles, vol. 4, no. 3, pp. 406–415, 2019
work page 2019
-
[17]
C. Wang, Y . Xie, H. Huang, and P. Liu, “A review of surrogate safety measures and their applications in connected and automated vehicles safety modeling,”Accident Analysis & Prevention, vol. 157, p. 106157, 2021
work page 2021
-
[18]
Responsibility-sensitive collision risk assessment and maneuvering safety evaluation,
P. Guo, Q. Zhu, and X. Wu, “Responsibility-sensitive collision risk assessment and maneuvering safety evaluation,” in2022 IEEE 25th International Conference on Intelligent Transportation Systems (ITSC). IEEE, 2022, pp. 99–104
work page 2022
-
[19]
Risk and complexity assessment of autonomous vehicle testing scenarios,
Z. Wei, H. Zhou, and R. Zhou, “Risk and complexity assessment of autonomous vehicle testing scenarios,” Applied Sciences, vol. 14, no. 21, 2024. 10
work page 2024
-
[20]
H. Suk, T. Kim, H. Park, P. Yadav, J. Lee, and S. Kim, “Rationale-aware autonomous driving policy utilizing safety force field implemented on carla simulator,”arXiv preprint arXiv:2211.10237, 2022
-
[22]
Anticipating accidents in dashcam videos,
F.-H. Chan, Y .-T. Chen, Y . Xiang, and M. Sun, “Anticipating accidents in dashcam videos,” inAsian conference on computer vision. Springer, 2016, pp. 136–153
work page 2016
-
[23]
Agent-centric risk assessment: Accident anticipation and risky region localization,
K.-H. Zeng, S.-H. Chou, F.-H. Chan, J. Carlos Niebles, and M. Sun, “Agent-centric risk assessment: Accident anticipation and risky region localization,” inProceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2017, pp. 2222–2230
work page 2017
-
[24]
Social gan: Socially acceptable trajectories with generative adversarial networks,
A. Gupta, J. Johnson, L. Fei-Fei, S. Savarese, and A. Alahi, “Social gan: Socially acceptable trajectories with generative adversarial networks,” inProceedings of the IEEE conference on computer vision and pattern recognition, 2018, pp. 2255–2264
work page 2018
-
[25]
Mantra: Memory augmented networks for multiple trajectory prediction,
F. Marchetti, F. Becattini, L. Seidenari, and A. D. Bimbo, “Mantra: Memory augmented networks for multiple trajectory prediction,” inProceedings of the IEEE/CVF conference on computer vision and pattern recognition, 2020, pp. 7143–7152
work page 2020
-
[26]
Learning 3d-aware egocentric spatial-temporal interaction via graph convolutional networks,
C. Li, Y . Meng, S. H. Chan, and Y .-T. Chen, “Learning 3d-aware egocentric spatial-temporal interaction via graph convolutional networks,” in2020 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2020, pp. 8418–8424
work page 2020
-
[27]
C. Li, S. H. Chan, and Y .-T. Chen, “Who make drivers stop? towards driver-centric risk assessment: Risk object identification via causal inference,” in2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2020, pp. 10 711–10 718
work page 2020
-
[28]
A comprehensive llm-powered framework for driving intelligence evaluation,
S. You, X. Luo, X. Liang, J. Yu, C. Zheng, and J. Gong, “A comprehensive llm-powered framework for driving intelligence evaluation,”arXiv preprint arXiv:2503.05164, 2025
-
[29]
Z. Zhou, H. Huang, B. Li, S. Zhao, Y . Mu, and J. Wang, “Safedrive: Knowledge-and data-driven risk-sensitive decision-making for autonomous vehicles with large language models,”arXiv preprint arXiv:2412.13238, 2024
-
[30]
Fusion-based feature attention gate component for vehicle detection based on event camera,
H. Cao, G. Chen, J. Xia, G. Zhuang, and A. Knoll, “Fusion-based feature attention gate component for vehicle detection based on event camera,”IEEE Sensors Journal, vol. 21, no. 21, pp. 24 540–24 548, 2021
work page 2021
-
[31]
Embracing events and frames with hierarchical feature refinement network for object detection,
H. Cao, Z. Zhang, Y . Xia, X. Li, J. Xia, G. Chen, and A. Knoll, “Embracing events and frames with hierarchical feature refinement network for object detection,” inEuropean Conference on Computer Vision. Springer, 2024, pp. 161–177
work page 2024
-
[32]
Motion planning for autonomous driving: The state of the art and future perspectives,
T. Puphal, M. Probst, and J. Eggert, “Probabilistic uncertainty-aware risk spot detector for naturalistic driving,”IEEE Transactions on Intelligent Vehicles, vol. 4, no. 3, p. 406–415, Sep. 2019. [Online]. Available: http://dx.doi.org/10.1109/TIV .2019.2919465
work page doi:10.1109/tiv 2019
-
[33]
Query-centric trajectory prediction,
Z. Zhou, J. Wang, Y .-H. Li, and Y .-K. Huang, “Query-centric trajectory prediction,” inProceedings of the IEEE/CVF conference on computer vision and pattern recognition, 2023, pp. 17 863–17 873
work page 2023
-
[34]
H. Cao, G. Chen, Z. Li, Q. Feng, J. Lin, and A. Knoll, “Efficient grasp detection network with gaussian- based grasp representation for robotic manipulation,”IEEE/ASME Transactions on Mechatronics, vol. 28, no. 3, pp. 1384–1394, 2023
work page 2023
-
[35]
Human-like driving behaviour emerges from a risk-based driver model,
S. Kolekar, J. De Winter, and D. Abbink, “Human-like driving behaviour emerges from a risk-based driver model,”Nature communications, vol. 11, no. 1, p. 4850, 2020
work page 2020
-
[36]
Potential field as scene affordance for behavior change-based visual risk object identification,
P.-Y . Pao, S.-W. Lu, Z.-Y . Lu, and Y .-T. Chen, “Potential field as scene affordance for behavior change-based visual risk object identification,”arXiv preprint arXiv:2409.15846, 2024
-
[37]
S. Thrun, “Probabilistic robotics,”Communications of the ACM, vol. 45, no. 3, pp. 52–57, 2002
work page 2002
-
[38]
B. Kouvaritakis and M. Cannon, “Model predictive control,”Switzerland: Springer International Publish- ing, vol. 38, no. 13-56, p. 7, 2016. 11 A Experiments compute resources The experiments are conducted on a laptop with an Intel(R) Core(TM) i7-9750H CPU @ 2.60GHz with 13GB of system memory, which is used both for testing and debugging. No GPU resource i...
work page 2016
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.