Uncertainty Representation in a SOTIF-Related Use Case with Dempster-Shafer Theory for LiDAR Sensor-Based Object Detection
Pith reviewed 2026-05-23 01:12 UTC · model grok-4.3
The pith
Dempster-Shafer Theory with variance-based sensitivity analysis represents and prioritizes uncertainties in LiDAR-based object detection for SOTIF scenarios.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
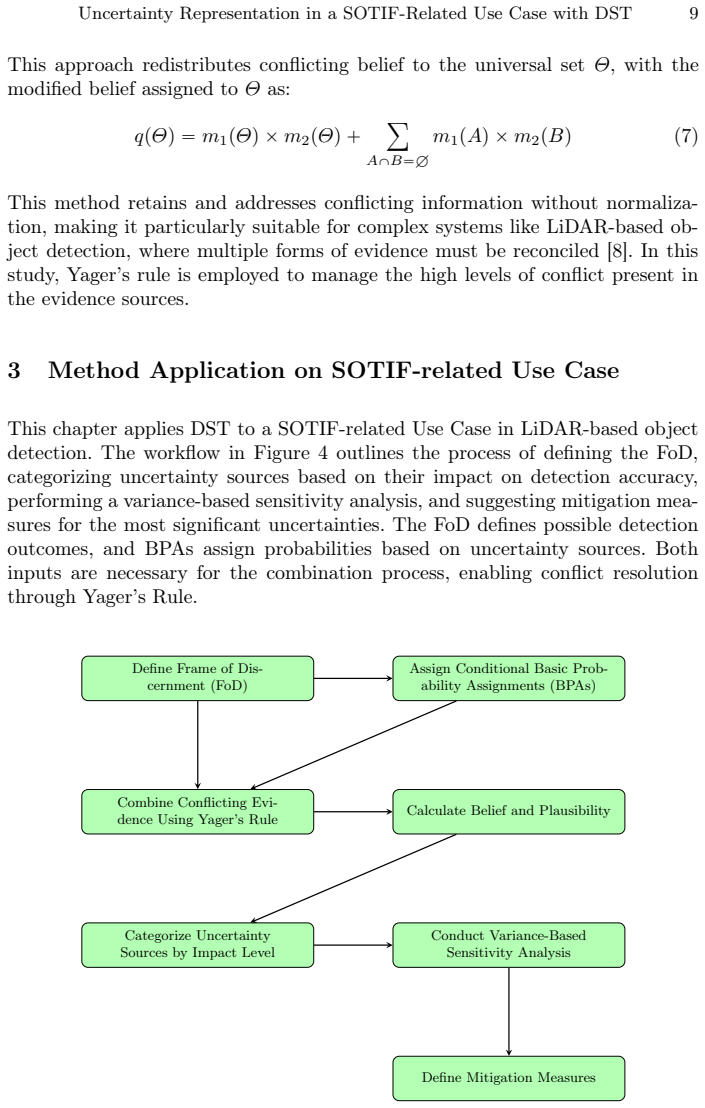
The central claim is that Dempster-Shafer Theory can be used to construct a Frame of Discernment representing LiDAR detection outcomes, with conditional Basic Probability Assignments based on uncertainty source dependencies, combined via Yager's Rule, and analyzed with variance-based sensitivity analysis to detail the specific impacts of uncertainties on detection accuracy in a SOTIF-related use case.
What carries the argument
Dempster-Shafer Theory applied via a Frame of Discernment, conditional Basic Probability Assignments, Yager's Rule of Combination, and variance-based sensitivity analysis to prioritize uncertainties.
If this is right
- Uncertainty sources can be identified, classified, and their effects on detection accuracy evaluated through a structured framework.
- Dependencies among uncertainty sources are modeled using conditional Basic Probability Assignments.
- Conflicting evidence is resolved with Yager's Rule of Combination.
- Variance-based sensitivity analysis prioritizes uncertainties by their specific impact on detection performance.
Where Pith is reading between the lines
- Applying this method to additional sensors or scenarios could reveal broader patterns in uncertainty management for autonomous vehicles.
- System developers might adjust sensor configurations based on the ranked impacts to improve overall detection reliability.
- Validating the conditional assignments against real-world data in multiple SOTIF scenarios would test the robustness of the dependency modeling.
Load-bearing premise
The dependencies among identified uncertainty sources can be captured without distortion by conditional Basic Probability Assignments defined on the Frame of Discernment for the chosen SOTIF scenario.
What would settle it
A simulation or experiment where varying the uncertainty sources according to their assigned priorities does not produce the expected changes in LiDAR detection performance metrics.
Figures



read the original abstract
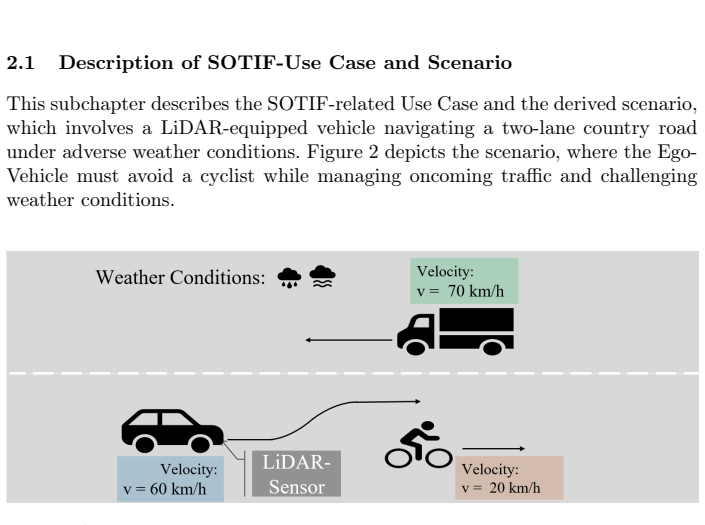
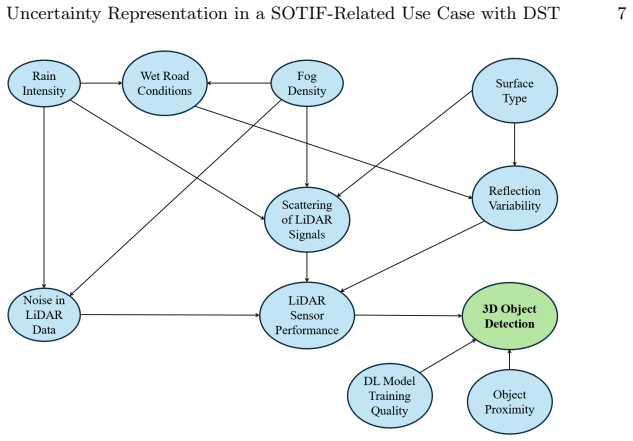
Uncertainty in LiDAR sensor-based object detection arises from environmental variability and sensor performance limitations. Representing these uncertainties is essential for ensuring the Safety of the Intended Functionality (SOTIF), which focuses on preventing hazards in automated driving scenarios. This paper presents a systematic approach to identifying, classifying, and representing uncertainties in LiDAR-based object detection within a SOTIF-related scenario. Dempster-Shafer Theory (DST) is employed to construct a Frame of Discernment (FoD) to represent detection outcomes. Conditional Basic Probability Assignments (BPAs) are applied based on dependencies among identified uncertainty sources. Yager's Rule of Combination is used to resolve conflicting evidence from multiple sources, providing a structured framework to evaluate uncertainties' effects on detection accuracy. The study applies variance-based sensitivity analysis (VBSA) to quantify and prioritize uncertainties, detailing their specific impact on detection performance.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents a systematic approach to identifying, classifying, and representing uncertainties in LiDAR-based object detection within a SOTIF-related scenario. It employs Dempster-Shafer Theory to construct a Frame of Discernment for detection outcomes, applies conditional Basic Probability Assignments based on dependencies among uncertainty sources (environmental variability and sensor limits), uses Yager's Rule of Combination to resolve conflicting evidence, and applies variance-based sensitivity analysis (VBSA) to quantify and prioritize the uncertainties' impact on detection performance.
Significance. If the FoD, conditional BPAs, and VBSA application are rigorously defined and validated with concrete examples, the framework could provide a structured method for handling epistemic uncertainties in safety-critical sensor perception, which is relevant for SOTIF compliance in automated driving. The combination of DST with sensitivity analysis is a plausible extension of existing uncertainty quantification techniques, but the absence of explicit constructions or results in the manuscript limits evaluation of its practical contribution.
major comments (2)
- [Abstract] Abstract and methodology description: the central claim that conditional BPAs capture dependencies among uncertainty sources without distortion on the chosen FoD is not supported by any explicit definition of the FoD, the conditional assignments, or the resulting combined masses after Yager's rule. Without these, it is impossible to verify whether the subsequent VBSA rankings reflect the intended uncertainty effects or propagate structural artifacts.
- [Abstract] The manuscript provides no equations, tables, or worked examples for the BPAs, Yager combination, or VBSA application (e.g., no first-order or total-order sensitivity indices, no specific uncertainty sources with assigned masses). These elements are load-bearing for the claim that the framework details the specific impact on detection performance.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed comments. We agree that the current manuscript lacks the explicit definitions, equations, assignments, and worked examples needed to substantiate the central claims regarding conditional BPAs, Yager's rule, and VBSA. We will undertake a major revision to add these elements.
read point-by-point responses
-
Referee: [Abstract] Abstract and methodology description: the central claim that conditional BPAs capture dependencies among uncertainty sources without distortion on the chosen FoD is not supported by any explicit definition of the FoD, the conditional assignments, or the resulting combined masses after Yager's rule. Without these, it is impossible to verify whether the subsequent VBSA rankings reflect the intended uncertainty effects or propagate structural artifacts.
Authors: We acknowledge that this criticism is correct. The manuscript does not currently provide explicit definitions of the FoD, the conditional BPAs, or the post-combination masses. In the revised version we will add a dedicated subsection that (i) states the FoD, (ii) lists the conditional BPAs for the two uncertainty sources, (iii) shows the step-by-step application of Yager's rule, and (iv) presents the resulting mass vector. A small numerical example will be included to demonstrate that the conditional assignments preserve the intended dependencies. revision: yes
-
Referee: [Abstract] The manuscript provides no equations, tables, or worked examples for the BPAs, Yager combination, or VBSA application (e.g., no first-order or total-order sensitivity indices, no specific uncertainty sources with assigned masses). These elements are load-bearing for the claim that the framework details the specific impact on detection performance.
Authors: We agree. The present text remains at a descriptive level and omits the required equations, tables, and numerical results. The revision will insert (a) the mathematical expressions for the conditional BPAs and Yager combination, (b) a table of the assigned masses and the combined result, and (c) the first-order and total-order sensitivity indices obtained from the VBSA, together with the ranking of the uncertainty sources and their quantified effect on detection performance. revision: yes
Circularity Check
No circularity in derivation chain
full rationale
The paper applies standard DST elements (FoD construction, conditional BPAs on identified uncertainty sources, Yager combination, then VBSA) to LiDAR detection uncertainties in a SOTIF scenario. No equations or steps reduce by construction to their own inputs; no self-citations are load-bearing; no fitted parameters are relabeled as predictions; no uniqueness theorems or ansatzes are smuggled via prior work. The approach is self-contained against external benchmarks of DST and sensitivity analysis, with the central claims resting on application of established rules rather than redefinition.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Dempster-Shafer Theory provides an appropriate framework for representing uncertainties in LiDAR-based object detection outcomes for SOTIF scenarios.
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/AbsoluteFloorClosure.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Dempster-Shafer Theory (DST) is employed to construct a Frame of Discernment (FoD) to represent detection outcomes. Conditional Basic Probability Assignments (BPAs) are applied based on dependencies among identified uncertainty sources. Yager's Rule of Combination is used...
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
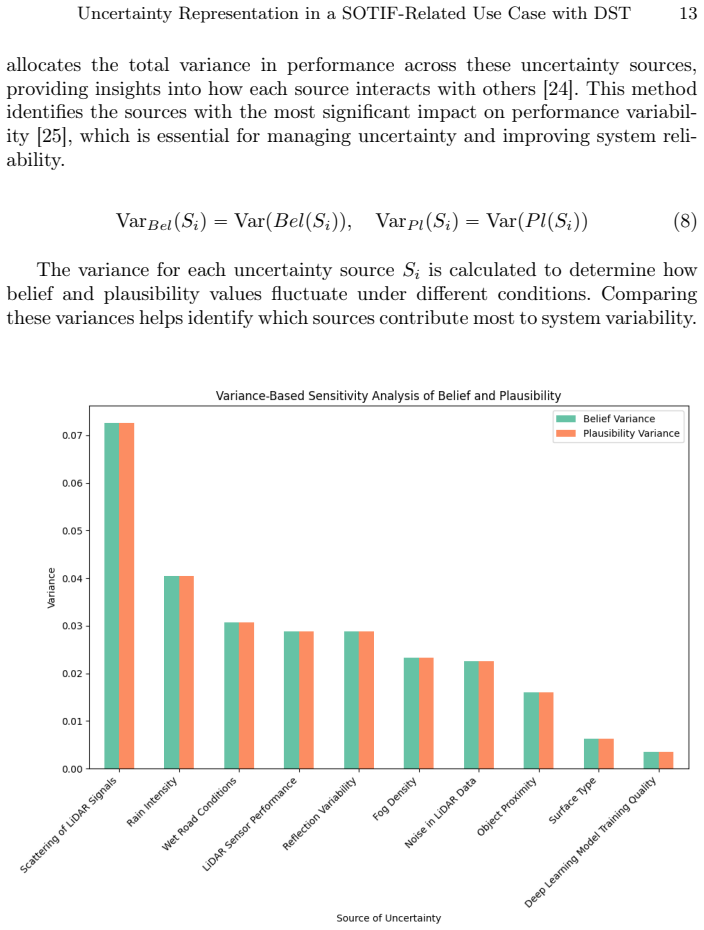
The study applies variance-based sensitivity analysis (VBSA) to quantify and prioritize uncertainties, detailing their specific impact on detection performance.
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Road vehicles – safety of the intended functionality,
ISO 21448:2022, “Road vehicles – safety of the intended functionality,” Switzerland, 2022-06. [Online]. Available: https://www.iso.org/standard/77490.html
work page 2022
-
[2]
L. Cao, Y. He, Y. Luo, and J. Chen, “Layered sotif analysis and 3 σ- criterion-based adaptive ekf for lidar-based multi-sensor fusion localization system on foggy days,” Remote Sensing, vol. 15, no. 12, 2023. [Online]. Available: https://www.mdpi.com/2072-4292/15/12/3047
work page 2023
-
[3]
Deep 3d object detection networks using lidar data: A review,
Y. Wu, Y. Wang, S. Zhang, and H. Ogai, “Deep 3d object detection networks using lidar data: A review,”IEEE Sensors Journal, vol. 21, no. 2, pp. 1152–1171, 2021
work page 2021
-
[4]
Improvingaccuracyofpseudo-lidarfor3dobjectdetectionby accuratedepthestimation,
T.PengandB.Kim,“Improvingaccuracyofpseudo-lidarfor3dobjectdetectionby accuratedepthestimation,”2023 IEEE 6th International Conference on Knowledge Innovation and Invention (ICKII), pp. 440–443, 2023
work page 2023
-
[5]
C. Gruber, P. O. Schenk, M. Schierholz, F. Kreuter, and G. Kauermann, “Sources of uncertainty in machine learning–a statisticians’ view,”arXiv preprint arXiv:2305.16703, 2023
-
[6]
Aleatory or epistemic? does it matter?
A. Der Kiureghian and O. Ditlevsen, “Aleatory or epistemic? does it matter?” Structural safety, vol. 31, no. 2, pp. 105–112, 2009
work page 2009
-
[7]
Shafer, A mathematical theory of evidence
G. Shafer, A mathematical theory of evidence. Princeton university press, 1976, vol. 42
work page 1976
-
[8]
Combination of evidence in dempster-shafer theory,
K. Sentz and S. Ferson, “Combination of evidence in dempster-shafer theory,” 2002
work page 2002
-
[9]
On the validity of dempster-shafer theory,
J. Dezert, P. Wang, and A. Tchamova, “On the validity of dempster-shafer theory,” in 2012 15th International Conference on Information Fusion, 2012, pp. 655–660
work page 2012
-
[10]
The assumptions behind dempster’s rule,
N. Wilson, “The assumptions behind dempster’s rule,” inUncertainty in Artificial Intelligence, 1993, pp. 527–534. 16 Milin Patel and Rolf Jung
work page 1993
-
[11]
A defect in dempster-shafer theory,
P. Wang, “A defect in dempster-shafer theory,” in Uncertainty in Artificial Intelligence, Ramon Lopez de Mantaras and David Poole, Eds. San Francisco (CA): Morgan Kaufmann, 1994, pp. 560–566. [Online]. Available: https://www.sciencedirect.com/science/article/pii/B9781558603325500766
work page 1994
-
[12]
Literature review of methods for representing uncertainty,
E. Zio and N. Pedroni, “Literature review of methods for representing uncertainty,” 2013
work page 2013
-
[13]
A. Adee, P. Munk, R. Gansch, and P. Liggesmeyer, “Uncertainty representation with extended evidential networks for modeling safety of the intended functionality (sotif),” 2020
work page 2020
-
[14]
M. Patel and R. Jung, “Simulation-based performance evaluation of 3d object detection methods with deep learning for a lidar point cloud dataset in a sotif- related use case,”2184-495X, 2024
work page 2024
-
[15]
C. Becker, J. C. Brewer, L. Yountet al., “Safety of the intended functionality of lane-centering and lane-changing maneuvers of a generic level 3 highway chauffeur system,” 2020
work page 2020
-
[16]
Carla: An open urban driving simulator,
A. Dosovitskiy, G. Ros, F. Codevilla, A. Lopez, and V. Koltun, “Carla: An open urban driving simulator,” inConference on robot learning, 2017, pp. 1–16
work page 2017
-
[17]
S. J. D. Prince,Understanding deep learning. MIT press, 2023
work page 2023
-
[18]
Dependency based reasoning in a dempster- shafer theoretic framework,
R. Hewawasam and K. Premaratne, “Dependency based reasoning in a dempster- shafer theoretic framework,” in2007 10th International Conference on Information Fusion, 2007, pp. 1–8
work page 2007
-
[19]
U. K. Rakowsky, “Fundamentals of the dempster-shafer theory and its applications to system safety and reliability modelling,”Journal of Polish Safety and Reliability Association, vol. 2, 2007
work page 2007
-
[20]
An extended approach for dempster-shafer theory,
F. Campos and S. Cavalcante, “An extended approach for dempster-shafer theory,” in Proceedings Fifth IEEE Workshop on Mobile Computing Systems and Applica- tions, 2003, pp. 338–344
work page 2003
-
[21]
G. Klir and B. Yuan,Fuzzy sets and fuzzy logic. Prentice hall New Jersey, 1995, vol. 4
work page 1995
-
[22]
Upperandlowerprobabilitiesinducedbyamultivaluedmapping,
A.P.Dempster,“Upperandlowerprobabilitiesinducedbyamultivaluedmapping,” The Annals of Mathematical Statistics, vol. 38, no. 2, pp. 325–339, 1967
work page 1967
-
[23]
X. Liu, P. Wei, M. Rashki, and J. Fu, “A probabilistic simulation method for sen- sitivity analysis of input epistemic uncertainties on failure probability,”Structural and Multidisciplinary Optimization, vol. 67, no. 1, p. 3, 2024
work page 2024
-
[24]
Variance-based sensitivity analysis of model outputs using surrogate models,
D. Shahsavani and A. Grimvall, “Variance-based sensitivity analysis of model outputs using surrogate models,”Environmental Modelling & Software, vol. 26, no. 6, pp. 723–730, 2011. [Online]. Available: https://www.sciencedirect.com/ science/article/pii/S136481521100003X
work page 2011
-
[25]
Uncertainty-based sensitivity indices for imprecise probability distributions,
J. W. Hall, “Uncertainty-based sensitivity indices for imprecise probability distributions,”Reliability Engineering & System Safety , vol. 91, no. 10, pp. 1443–1451, 2006. [Online]. Available: https://www.sciencedirect.com/science/ article/pii/S0951832005002541
work page 2006
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.