Do as I Do: Dexterous Manipulation Data from Everyday Human Videos
Pith reviewed 2026-06-26 20:49 UTC · model grok-4.3
The pith
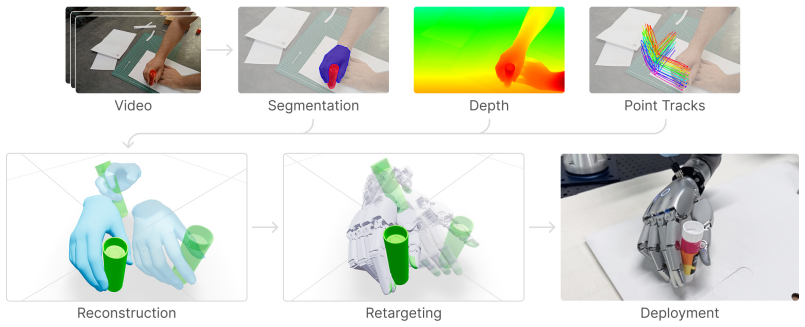
DO AS I DO reconstructs hand-object interactions from everyday RGB videos and retargets them to multi-fingered robot hands.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
DO AS I DO reconstructs hand-object interactions from various egocentric and exocentric in-the-wild video sources and retargets these estimates into sequences of actions executable by multi-fingered dexterous robotic hands, yielding robot-complete manipulation data from disparate human videos and outperforming previous state of the art in both interaction estimation and trajectory extraction.
What carries the argument
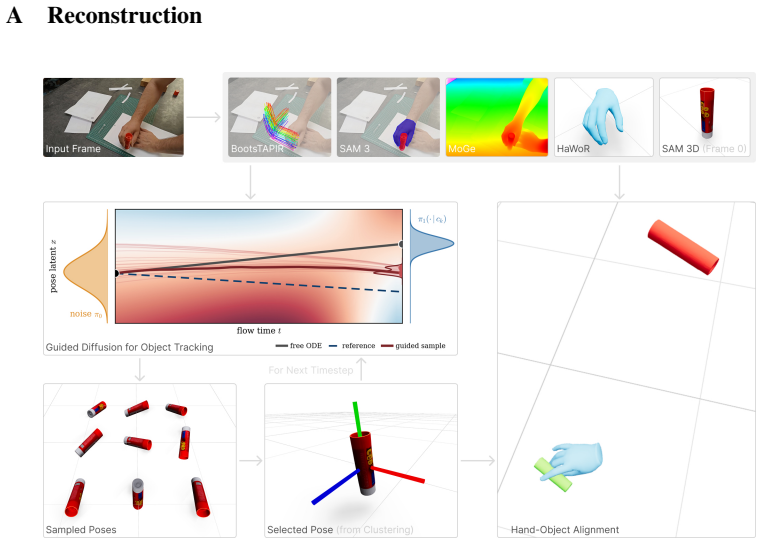
The reconstruction-retargeting pipeline that estimates hand and object poses from RGB frames and maps the resulting interactions across the human-to-robot embodiment gap.
If this is right
- Outperforms prior methods on ground-truth datasets for hand-object interaction estimation.
- Extracts usable dexterous manipulation trajectories from online video clips without specialized capture equipment.
- Supplies an efficacy playbook for how practitioners should collect and process human videos for robot manipulation.
Where Pith is reading between the lines
- Large public video collections could be mined at scale to produce robot training data if retargeting remains stable.
- The same pipeline might be adapted to other robot embodiments once the core retargeting step is validated.
- Reduced dependence on motion-capture labs would follow if monocular video alone proves sufficient.
Load-bearing premise
Accurate hand-object interaction estimates can be obtained from monocular RGB videos alone and can be reliably retargeted to robots without additional sensors or calibration.
What would settle it
A controlled test on videos with known ground-truth hand and object poses where the extracted robot trajectories fail to reproduce the demonstrated contact events or motion when executed on hardware.
Figures










read the original abstract
How can we scalably generate data for robotic manipulation, especially on human-like platforms such as dexterous multi-fingered hands? Learning from human videos has recently emerged as a likely answer to this question. However, difficulties in estimating hand-object interaction and crossing the human-to-robot embodiment gap have hindered the adoption of abundant monocular RGB-only human videos as the primary source of robot manipulation data. In this work, we present DO AS I DO, an algorithm to reconstruct and retarget monocular RGB human videos to multi-fingered dexterous robotic hands. DO AS I DO reconstructs hand-object interactions from various egocentric and exocentric in-the-wild video sources. The algorithm then retargets these hand-object interaction estimates into a sequence of actions executable in the real world, yielding robot-complete manipulation data from disparate human videos. Overall, DO AS I DO outperforms previous state of the art in estimating hand-object interactions and extracting dexterous manipulation trajectories from RGB videos, as we show in experiments on datasets with ground truths and on a dataset of video clips collected online. Our experiments enable us to propose an efficacy playbook for practitioners collecting human data for manipulation.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces DO AS I DO, an algorithm that reconstructs hand-object interactions from monocular RGB videos (both egocentric and exocentric, in-the-wild) and retargets the resulting estimates into sequences of actions for multi-fingered dexterous robotic hands. It claims to produce robot-complete manipulation data from disparate human videos and to outperform prior state-of-the-art methods in hand-object interaction estimation and dexterous trajectory extraction, as demonstrated on ground-truth datasets and a collection of online video clips; an efficacy playbook for human data collection is also proposed.
Significance. If the retargeting step reliably closes the embodiment gap and produces physically executable trajectories validated on hardware, the work could substantially lower the barrier to collecting large-scale dexterous manipulation datasets from abundant everyday videos, addressing a key bottleneck in learning for anthropomorphic hands.
major comments (3)
- [Abstract] Abstract: the central claim that the method 'retargets these hand-object interaction estimates into a sequence of actions executable in the real world' is load-bearing for the 'robot-complete' data assertion, yet the abstract (and by extension the evaluation) provides no indication that robot-specific kinematic/dynamic constraints or joint limits are enforced during retargeting, nor that success is measured by actual robot execution rather than pose similarity metrics alone.
- [Abstract] Abstract / Experiments: the assertion of outperformance over prior SOTA on ground-truth datasets and online clips is presented without any referenced error metrics, ablation results, or quantitative tables, leaving the strength of the empirical support for the core contribution unassessable from the provided description.
- [Abstract] The weakest assumption—that monocular RGB estimates can be reliably retargeted across the human-to-robot gap without extra sensors or calibration—is not tested against failure modes such as dropped infeasible contacts or violations of robot dynamics; this directly undermines the claim that the output constitutes executable robot data.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our abstract and evaluation claims. We address each major comment below, clarifying the manuscript's content and proposing targeted revisions where appropriate to improve clarity without overstating results.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim that the method 'retargets these hand-object interaction estimates into a sequence of actions executable in the real world' is load-bearing for the 'robot-complete' data assertion, yet the abstract (and by extension the evaluation) provides no indication that robot-specific kinematic/dynamic constraints or joint limits are enforced during retargeting, nor that success is measured by actual robot execution rather than pose similarity metrics alone.
Authors: We agree the abstract phrasing is imprecise and could better reflect the evaluation scope. Section 4.2 of the manuscript details the retargeting optimization, which explicitly incorporates robot kinematic constraints, joint limits, and contact feasibility via an optimization-based retargeter. However, success is quantified using pose similarity, trajectory smoothness, and simulation-based feasibility metrics rather than physical hardware execution. We will revise the abstract to state that the output yields 'trajectories suitable for real-world execution' and add a parenthetical reference to the retargeting constraints and metrics used. revision: yes
-
Referee: [Abstract] Abstract / Experiments: the assertion of outperformance over prior SOTA on ground-truth datasets and online clips is presented without any referenced error metrics, ablation results, or quantitative tables, leaving the strength of the empirical support for the core contribution unassessable from the provided description.
Authors: The abstract summarizes results that are fully quantified in Section 5 with specific metrics (e.g., hand pose error, object pose error, contact accuracy) and comparisons to prior methods in Tables 1-3, plus ablations in Section 5.3. To make this immediately verifiable from the abstract alone, we will insert brief references such as '(see Tables 1-2 for quantitative results)' after the outperformance claim. revision: yes
-
Referee: [Abstract] The weakest assumption—that monocular RGB estimates can be reliably retargeted across the human-to-robot gap without extra sensors or calibration—is not tested against failure modes such as dropped infeasible contacts or violations of robot dynamics; this directly undermines the claim that the output constitutes executable robot data.
Authors: We acknowledge this is a fair point on the strength of the 'executable' claim. The manuscript evaluates retargeting success via contact preservation and dynamics-aware optimization in simulation (Section 5.2), and discusses failure cases such as contact loss in the limitations paragraph. However, we do not exhaustively test all possible dynamics violations or perform hardware rollouts. We will expand the abstract's final sentence and add a short limitations subsection clarifying the simulation-based validation scope. revision: partial
Circularity Check
No circularity detected; claims rely on external experimental benchmarks.
full rationale
The provided abstract and text describe an algorithmic pipeline for video-based hand-object reconstruction and retargeting, with performance claims tied to comparisons against prior methods on ground-truth datasets and online video clips. No equations, parameter-fitting steps, self-citations, or uniqueness theorems are referenced that would reduce any prediction or result to the inputs by construction. The derivation chain is self-contained against external benchmarks, consistent with the default expectation for non-circular papers.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
A. N. Meltzoff and M. K. Moore. Imitation of Facial and Manual Gestures by Human Neonates.Science, 198(4312):75–78, Oct. 1977. doi:10.1126/science.198.4312.75. URL https://www.science.org/doi/10.1126/science.198.4312.75
-
[2]
A. N. Meltzoff. Infant imitation after a 1-week delay: Long-term memory for novel acts and multiple stimuli.Developmental Psychology, 24(4):470–476, 1988. ISSN 1939-0599, 0012-1649. doi:10.1037/0012-1649.24.4.470. URLhttps://doi.apa.org/doi/10.1037/ 0012-1649.24.4.470
-
[3]
D. M. Bernard Meltzer.Machine Intelligence 7. 1972. URLhttp://archive.org/ details/mi7_20200519
1972
-
[4]
S. B. Kang and K. Ikeuchi. Toward automatic robot instruction from perception-mapping human grasps to manipulator grasps.IEEE Transactions on Robotics and Automation, 13(1): 81–95, 1997. doi:10.1109/70.554349
-
[5]
A. A. Efros, A. C. Berg, G. Mori, and J. Malik. Recognizing action at a distance. InIEEE International Conference on Computer Vision, pages 726–733, Nice, France, 2003
2003
-
[6]
Qin, Y .-H
Y . Qin, Y .-H. Wu, S. Liu, H. Jiang, R. Yang, Y . Fu, and X. Wang. Dexmv: Imitation learning for dexterous manipulation from human videos. InEuropean Conference on Computer Vision, pages 570–587. Springer, 2022. 9
2022
-
[7]
J. Mu, S. Yang, Y . Bao, H. Bae, T. Wei, L. Xu, B. Li, H. Xu, and J. Pang. Deximit: Learning bimanual dexterous manipulation from monocular human videos.arXiv preprint arXiv:2602.10105, 2026
arXiv 2026
- [8]
-
[9]
V . Liu, A. Adeniji, H. Zhan, S. Haldar, R. Bhirangi, P. Abbeel, and L. Pinto. Egozero: Robot learning from smart glasses.arXiv preprint arXiv:2505.20290, 2025
arXiv 2025
-
[10]
R. Wang, S. Xu, Y . Dong, Y . Deng, J. Xiang, Z. Lv, G. Sun, X. Tong, and J. Yang. Moge- 2: Accurate monocular geometry with metric scale and sharp details, 2025. URLhttps: //arxiv.org/abs/2507.02546
Pith/arXiv arXiv 2025
-
[11]
S. D. Team, X. Chen, F.-J. Chu, P. Gleize, K. J. Liang, A. Sax, H. Tang, W. Wang, M. Guo, T. Hardin, X. Li, A. Lin, J. Liu, Z. Ma, A. Sagar, B. Song, X. Wang, J. Yang, B. Zhang, P. Doll´ar, G. Gkioxari, M. Feiszli, and J. Malik. Sam 3d: 3dfy anything in images, 2025. URL https://arxiv.org/abs/2511.16624
Pith/arXiv arXiv 2025
-
[12]
Pavlakos, D
G. Pavlakos, D. Shan, I. Radosavovic, A. Kanazawa, D. Fouhey, and J. Malik. Reconstructing hands in 3D with transformers. InCVPR, 2024
2024
-
[13]
Mujoco warp (MJWarp).https://mujoco.readthedocs
Google DeepMind and NVIDIA. Mujoco warp (MJWarp).https://mujoco.readthedocs. io/en/latest/mjwarp/, 2025. GPU-accelerated implementation of the MuJoCo physics engine built on NVIDIA Warp
2025
-
[14]
NVIDIA Isaac Sim: Robotics simulation and synthetic data generation.https: //developer.nvidia.com/isaac/sim, 2025
NVIDIA. NVIDIA Isaac Sim: Robotics simulation and synthetic data generation.https: //developer.nvidia.com/isaac/sim, 2025. GPU-accelerated robotics simulator built on NVIDIA Omniverse
2025
-
[15]
C. Pan, C. Wang, H. Qi, Z. Liu, H. Bharadhwaj, A. Sharma, T. Wu, G. Shi, J. Malik, and F. Hogan. Spider: Scalable physics-informed dexterous retargeting, 2026. URLhttps:// arxiv.org/abs/2511.09484
arXiv 2026
-
[16]
T. G. W. Lum, O. Y . Lee, C. K. Liu, and J. Bohg. Crossing the human-robot embodiment gap with sim-to-real rl using one human demonstration, 2025. URLhttps://arxiv.org/abs/ 2504.12609
arXiv 2025
-
[17]
B. Wen, W. Yang, J. Kautz, and S. Birchfield. Foundationpose: Unified 6d pose estimation and tracking of novel objects, 2024. URLhttps://arxiv.org/abs/2312.08344
arXiv 2024
-
[18]
H. Chen, T. Dong, T. Wu, L. Wang, Y . Jangir, Y . Niu, Y . Ye, H. Bharadhwaj, Z. Erickson, and J. Ichnowski. Dexterous manipulation policies from rgb human videos via 3d hand-object trajectory reconstruction.arXiv preprint arXiv:2602.09013, 2026
arXiv 2026
-
[19]
Meshy ai: The #1 ai 3d model generator for creators.https://www.meshy.ai/,
Meshy AI. Meshy ai: The #1 ai 3d model generator for creators.https://www.meshy.ai/,
-
[20]
Accessed: 2025-04-17
2025
-
[21]
Z. Wei, Z. Xu, J. Guo, Y . Hou, C. Gao, Z. Cai, J. Luo, and L. Shao.D(R,O)grasp: A unified representation of robot and object interaction for cross-embodiment dexterous grasping, 2025. URLhttps://arxiv.org/abs/2410.01702
arXiv 2025
-
[22]
Y . Ze, G. Zhang, K. Zhang, C. Hu, M. Wang, and H. Xu. 3d diffusion policy: Generalizable visuomotor policy learning via simple 3d representations. InProceedings of Robotics: Science and Systems (RSS), 2024
2024
-
[23]
J. Hsieh, K.-H. Tu, K.-H. Hung, and T.-W. Ke. Dexman: Learning bimanual dexterous manip- ulation from human and generated videos.arXiv preprint arXiv:2510.08475, 2025. 10
arXiv 2025
-
[24]
J. Xiang, Z. Lv, S. Xu, Y . Deng, R. Wang, B. Zhang, D. Chen, X. Tong, and J. Yang. Structured 3d latents for scalable and versatile 3d generation.arXiv preprint arXiv:2412.01506, 2024
Pith/arXiv arXiv 2024
-
[25]
Y . Xiao, J. Wang, N. Xue, N. Karaev, Y . Makarov, B. Kang, X. Zhu, H. Bao, Y . Shen, and X. Zhou. Spatialtrackerv2: 3d point tracking made easy, 2025. URLhttps://arxiv.org/ abs/2507.12462
arXiv 2025
-
[26]
Yan and J
W. Yan and J. Chu. Foundationpose-plus-plus: Real-time 6d pose tracker in high- dynamic scenes. GitHub repository, 2025. URLhttps://github.com/teal024/ FoundationPose-plus-plus
2025
-
[27]
Y . J. Ma, S. Sodhani, D. Jayaraman, O. Bastani, V . Kumar, and A. Zhang. Vip: Towards universal visual reward and representation via value-implicit pre-training, 2023. URLhttps: //arxiv.org/abs/2210.00030
Pith/arXiv arXiv 2023
-
[28]
Y . J. Ma, W. Liang, V . Som, V . Kumar, A. Zhang, O. Bastani, and D. Jayaraman. Liv: Language-image representations and rewards for robotic control, 2023. URLhttps:// arxiv.org/abs/2306.00958
arXiv 2023
-
[29]
S. Nair, A. Rajeswaran, V . Kumar, C. Finn, and A. Gupta. R3m: A universal visual represen- tation for robot manipulation, 2022. URLhttps://arxiv.org/abs/2203.12601
Pith/arXiv arXiv 2022
-
[30]
K. Shaw, S. Bahl, and D. Pathak. Videodex: Learning dexterity from internet videos, 2022. URLhttps://arxiv.org/abs/2212.04498
arXiv 2022
- [31]
-
[32]
R. Yang, Q. Yu, Y . Wu, R. Yan, B. Li, A.-C. Cheng, X. Zou, Y . Fang, X. Cheng, R.-Z. Qiu, H. Yin, S. Liu, S. Han, Y . Lu, and X. Wang. Egovla: Learning vision-language-action models from egocentric human videos, 2025. URLhttps://arxiv.org/abs/2507.12440
Pith/arXiv arXiv 2025
-
[33]
H. Luo, Y . Feng, W. Zhang, S. Zheng, Y . Wang, H. Yuan, J. Liu, C. Xu, Q. Jin, and Z. Lu. Being-h0: Vision-language-action pretraining from large-scale human videos, 2025. URL https://arxiv.org/abs/2507.15597
arXiv 2025
-
[34]
R. Punamiya, S. Kareer, Z. Liu, J. Citron, R.-Z. Qiu, X. Cai, A. Gavryushin, J. Chen, D. Li- conti, L. Y . Zhu, P. Aphiwetsa, B. Li, A. Cheluva, P. Kuppili, Y . Liu, D. Patel, A. Gao, H.-Y . Chung, R. Co, R. Zbizika, J. Liu, X. Xu, H. Xiong, G. Chen, S. Oliani, C. Yang, X. Wang, J. Fort, R. Newcombe, J. Gao, J. Chong, G. Matsuda, A. Doriwala, M. Pollefeys...
Pith/arXiv arXiv 2026
-
[35]
R. G. Goswami, A. Bar, D. Fan, T.-Y . Yang, G. Zhou, P. Krishnamurthy, M. Rabbat, F. Khor- rami, and Y . LeCun. World models for learning dexterous hand-object interactions from human videos, 2026. URLhttps://arxiv.org/abs/2512.13644
arXiv 2026
-
[36]
S. Gao, W. Liang, K. Zheng, A. Malik, S. Ye, S. Yu, W.-C. Tseng, Y . Dong, K. Mo, C.-H. Lin, Q. Ma, S. Nah, L. Magne, J. Xiang, Y . Xie, R. Zheng, D. Niu, Y . L. Tan, K. R. Zentner, G. Kurian, S. Indupuru, P. Jannaty, J. Gu, J. Zhang, J. Malik, P. Abbeel, M.-Y . Liu, Y . Zhu, J. Jang, and L. J. Fan. Dreamdojo: A generalist robot world model from large-sca...
Pith/arXiv arXiv 2026
-
[37]
J. Shi, Z. Zhao, T. Wang, I. Pedroza, A. Luo, J. Wang, J. Ma, and D. Jayaraman. Zeromimic: Distilling robotic manipulation skills from web videos, 2025. URLhttps://arxiv.org/ abs/2503.23877. 11
arXiv 2025
-
[38]
A. Agarwal, S. Uppal, K. Shaw, and D. Pathak. Dexterous functional grasping, 2023. URL https://arxiv.org/abs/2312.02975
arXiv 2023
-
[39]
H. Bharadhwaj, R. Mottaghi, A. Gupta, and S. Tulsiani. Track2act: Predicting point tracks from internet videos enables generalizable robot manipulation, 2024. URLhttps://arxiv. org/abs/2405.01527
arXiv 2024
-
[40]
C. Wang, L. Fan, J. Sun, R. Zhang, L. Fei-Fei, D. Xu, Y . Zhu, and A. Anandkumar. Mimicplay: Long-horizon imitation learning by watching human play, 2023. URLhttps://arxiv.org/ abs/2302.12422
arXiv 2023
-
[41]
H. G. Singh, A. Loquercio, C. Sferrazza, J. Wu, H. Qi, P. Abbeel, and J. Malik. Hand-object interaction pretraining from videos, 2024. URLhttps://arxiv.org/abs/2409.08273
arXiv 2024
-
[42]
Y . Qin, H. Su, and X. Wang. From one hand to multiple hands: Imitation learning for dexter- ous manipulation from single-camera teleoperation, 2023. URLhttps://arxiv.org/abs/ 2204.12490
arXiv 2023
-
[43]
J. Li, Y . Zhu, Y . Xie, Z. Jiang, M. Seo, G. Pavlakos, and Y . Zhu. Okami: Teaching humanoid robots manipulation skills through single video imitation, 2024. URLhttps://arxiv.org/ abs/2410.11792
arXiv 2024
-
[44]
Romero, D
J. Romero, D. Tzionas, and M. J. Black. Embodied hands: Modeling and capturing hands and bodies together.ACM Transactions on Graphics, (Proc. SIGGRAPH Asia), 36(6), Nov. 2017
2017
-
[45]
R. A. Potamias, J. Zhang, J. Deng, and S. Zafeiriou. Wilor: End-to-end 3d hand localization and reconstruction in-the-wild, 2024
2024
-
[46]
Zhang, J
J. Zhang, J. Deng, C. Ma, and R. A. Potamias. Hawor: World-space hand motion reconstruc- tion from egocentric videos. InProceedings of the Computer Vision and Pattern Recognition Conference, pages 1805–1815, 2025
2025
-
[47]
M. Liu, C. Xu, H. Jin, L. Chen, M. Varma T, Z. Xu, and H. Su. One-2-3-45: Any single image to 3d mesh in 45 seconds without per-shape optimization.Advances in Neural Information Processing Systems, 36, 2024
2024
-
[48]
T. Lee, B. Wen, M. Kang, G. Kang, I. S. Kweon, and K.-J. Yoon. Any6D: Model-free 6d pose estimation of novel objects. InProceedings of the Computer Vision and Pattern Recognition Conference (CVPR), 2025
2025
-
[49]
Hasson, G
Y . Hasson, G. Varol, D. Tzionas, I. Kalevatykh, M. J. Black, I. Laptev, and C. Schmid. Learn- ing joint reconstruction of hands and manipulated objects. InProceedings of the IEEE/CVF conference on computer vision and pattern recognition, pages 11807–11816, 2019
2019
-
[50]
Y . Ye, A. Gupta, and S. Tulsiani. What’s in your hands? 3d reconstruction of generic ob- jects in hands. InProceedings of the IEEE/CVF conference on computer vision and pattern recognition, pages 3895–3905, 2022
2022
-
[51]
Prakash, M
A. Prakash, M. Chang, M. Jin, R. Tu, and S. Gupta. 3d reconstruction of objects in hands without real world 3d supervision. InEuropean Conference on Computer Vision, pages 126–
-
[52]
J. Wu, G. Pavlakos, G. Gkioxari, and J. Malik. Reconstructing hand-held objects in 3d.arXiv preprint arXiv:2404.06507, 2024
arXiv 2024
-
[53]
Y . Ye, J. Li, R. Rong, and C. K. Liu. Whole: World-grounded hand-object lifted from egocen- tric videos.CVPR Findings, 2026
2026
-
[54]
Y . Ye, P. Hebbar, A. Gupta, and S. Tulsiani. Diffusion-guided reconstruction of everyday hand-object interaction clips. InICCV, 2023. 12
2023
-
[55]
Y . Ye, A. Gupta, K. Kitani, and S. Tulsiani. G-hop: Generative hand-object prior for interaction reconstruction and grasp synthesis. InCVPR, 2024
2024
-
[56]
K. Zakka. Mink: Python inverse kinematics based on MuJoCo, Feb. 2026. URLhttps: //github.com/kevinzakka/mink
2026
-
[57]
C. M. Kim, B. Yi, H. Choi, Y . Ma, K. Goldberg, and A. Kanazawa. Pyroki: A modular toolkit for robot kinematic optimization, 2025. URLhttps://arxiv.org/abs/2505.03728
arXiv 2025
-
[58]
Y . Qin, W. Yang, B. Huang, K. V . Wyk, H. Su, X. Wang, Y .-W. Chao, and D. Fox. Anyteleop: A general vision-based dexterous robot arm-hand teleoperation system, 2024. URLhttps: //arxiv.org/abs/2307.04577
arXiv 2024
-
[59]
Z.-H. Yin, C. Wang, L. Pineda, K. Bodduluri, T. Wu, P. Abbeel, and M. Mukadam. Geometric retargeting: A principled, ultrafast neural hand retargeting algorithm, 2025. URLhttps: //arxiv.org/abs/2503.07541
arXiv 2025
-
[60]
K. Li, P. Li, T. Liu, Y . Li, and S. Huang. Maniptrans: Efficient dexterous bimanual manipula- tion transfer via residual learning, 2025. URLhttps://arxiv.org/abs/2503.21860
arXiv 2025
- [61]
- [62]
-
[63]
L. Yang, H. J. T. Suh, T. Zhao, B. P. Graesdal, T. Kelestemur, J. Wang, T. Pang, and R. Tedrake. Physics-driven data generation for contact-rich manipulation via trajectory optimization, 2026. URLhttps://arxiv.org/abs/2502.20382
arXiv 2026
-
[64]
Z. Si, J. E. Chen, M. E. Karagozler, A. Bronars, J. Hutchinson, T. Lampe, N. Gileadi, T. How- ell, S. Saliceti, L. Barczyk, I. O. Correa, T. Erez, M. Shridhar, M. F. Martins, K. Bousmalis, N. Heess, F. Nori, and M. Bauza. Exostart: Efficient learning for dexterous manipulation with sensorized exoskeleton demonstrations, 2025. URLhttps://arxiv.org/abs/2506. 11775
2025
-
[65]
N. Carion, L. Gustafson, Y .-T. Hu, S. Debnath, R. Hu, D. Suris, C. Ryali, K. V . Alwala, H. Khedr, A. Huang, J. Lei, T. Ma, B. Guo, A. Kalla, M. Marks, J. Greer, M. Wang, P. Sun, R. R¨adle, T. Afouras, E. Mavroudi, K. Xu, T.-H. Wu, Y . Zhou, L. Momeni, R. Hazra, S. Ding, S. Vaze, F. Porcher, F. Li, S. Li, A. Kamath, H. K. Cheng, P. Doll ´ar, N. Ravi, K. ...
Pith/arXiv arXiv 2026
-
[66]
A. Lugmayr, M. Danelljan, A. Romero, F. Yu, R. Timofte, and L. V . Gool. Repaint: Inpaint- ing using denoising diffusion probabilistic models, 2022. URLhttps://arxiv.org/abs/ 2201.09865
arXiv 2022
-
[67]
Y . Song, J. Sohl-Dickstein, D. P. Kingma, A. Kumar, S. Ermon, and B. Poole. Score-based generative modeling through stochastic differential equations, 2021. URLhttps://arxiv. org/abs/2011.13456
Pith/arXiv arXiv 2021
-
[68]
C. Doersch, P. Luc, Y . Yang, D. Gokay, S. Koppula, A. Gupta, J. Heyward, I. Rocco, R. Goroshin, J. Carreira, and A. Zisserman. Bootstap: Bootstrapped training for tracking- any-point, 2024. URLhttps://arxiv.org/abs/2402.00847
arXiv 2024
-
[69]
Veicht, P.-E
A. Veicht, P.-E. Sarlin, P. Lindenberger, and M. Pollefeys. GeoCalib: Single-image Calibration with Geometric Optimization. InECCV, 2024. 13
2024
-
[70]
OpenAI, I. Akkaya, M. Andrychowicz, M. Chociej, M. Litwin, B. McGrew, A. Petron, A. Paino, M. Plappert, G. Powell, R. Ribas, J. Schneider, N. Tezak, J. Tworek, P. Welinder, L. Weng, Q. Yuan, W. Zaremba, and L. Zhang. Solving rubik’s cube with a robot hand, 2019. URLhttps://arxiv.org/abs/1910.07113
Pith/arXiv arXiv 2019
- [71]
-
[72]
Y .-W. Chao, W. Yang, Y . Xiang, P. Molchanov, A. Handa, J. Tremblay, Y . S. Narang, K. Van Wyk, U. Iqbal, S. Birchfield, et al. Dexycb: A benchmark for capturing hand grasp- ing of objects. InProceedings of the IEEE/CVF conference on computer vision and pattern recognition, pages 9044–9053, 2021
2021
-
[73]
Y . Liu, Y . Liu, C. Jiang, K. Lyu, W. Wan, H. Shen, B. Liang, Z. Fu, H. Wang, and L. Yi. Hoi4d: A 4d egocentric dataset for category-level human-object interaction. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 21013–21022, 2022
2022
-
[74]
X. Zhan, L. Yang, Y . Zhao, K. Mao, H. Xu, Z. Lin, K. Li, and C. Lu. Oakink2: A dataset of bimanual hands-object manipulation in complex task completion, 2024. URLhttps:// arxiv.org/abs/2403.19417
arXiv 2024
-
[75]
T. Feix, J. Romero, H.-B. Schmiedmayer, A. M. Dollar, and D. Kragic. The grasp taxonomy of human grasp types.IEEE Transactions on human-machine systems, 46(1):66–77, 2015
2015
-
[76]
R. Hoque, P. Huang, D. J. Yoon, M. Sivapurapu, and J. Zhang. Egodex: Learning dexterous manipulation from large-scale egocentric video.arXiv preprint arXiv:2505.11709, 2025
Pith/arXiv arXiv 2025
-
[77]
D. Shan, J. Geng, M. Shu, and D. F. Fouhey. Understanding human hands in contact at internet scale. InProceedings of the IEEE/CVF conference on computer vision and pattern recognition, pages 9869–9878, 2020
2020
-
[78]
Y . Lipman, R. T. Q. Chen, H. Ben-Hamu, M. Nickel, and M. Le. Flow matching for generative modeling, 2023. URLhttps://arxiv.org/abs/2210.02747
Pith/arXiv arXiv 2023
-
[79]
X. Wei, M. Liu, Z. Ling, and H. Su. Approximate convex decomposition for 3d meshes with collision-aware concavity and tree search.ACM Transactions on Graphics, 41(4):1–18,
-
[80]
Available: http://dx.doi.org/10.1145/3528223.3530103
ISSN 1557-7368. doi:10.1145/3528223.3530103. URLhttp://dx.doi.org/10. 1145/3528223.3530103
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.