IDDMBSE: Integrating Data-Driven and Model-Based Systems Engineering for Trusted Autonomous Cyber-Physical Systems
Pith reviewed 2026-06-28 00:48 UTC · model grok-4.3
The pith
IDDMBSE adds data-driven loops to every step of the MBSE V-process for trusted autonomous cyber-physical systems.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central claim is that IDDMBSE extends the rigorous MBSE V-process with a data-driven loop at every step, anchored in SysML, the autonomy stack, and a hybrid model-based plus data-driven trade-off architecture, and that this integrated methodology can be instantiated in an open-source toolchain (PERFECT, TRADES-X, VERITAS) and successfully exercised across the development lifecycle of a Trusted Autonomous Ground Robot in simulation.
What carries the argument
IDDMBSE, the Integrated Data-Driven and Model-Based Systems Engineering methodology that inserts a data-driven loop at every step of the MBSE V-process while retaining SysML anchoring and a hybrid trade-off architecture.
If this is right
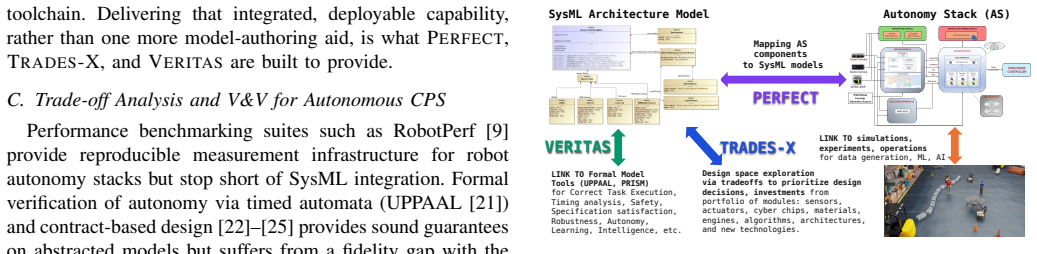
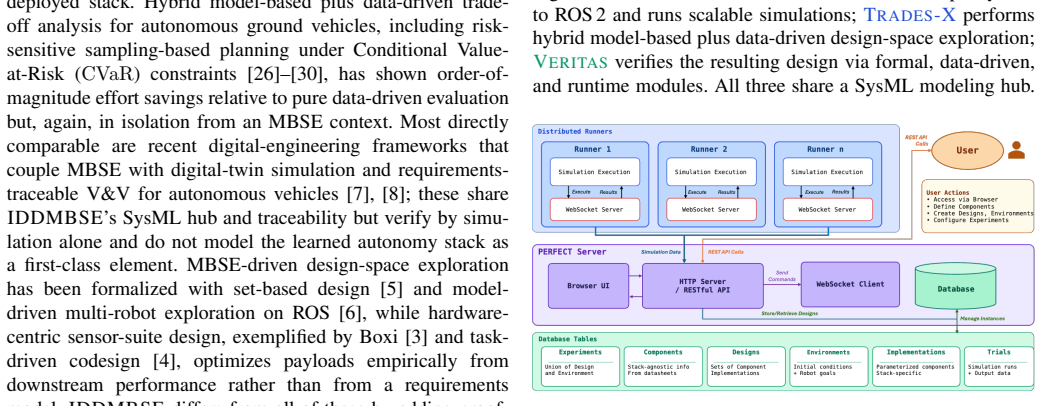
- SysML system architectures can be directly mapped to executable ROS autonomy stacks for scalable performance evaluation via PERFECT.
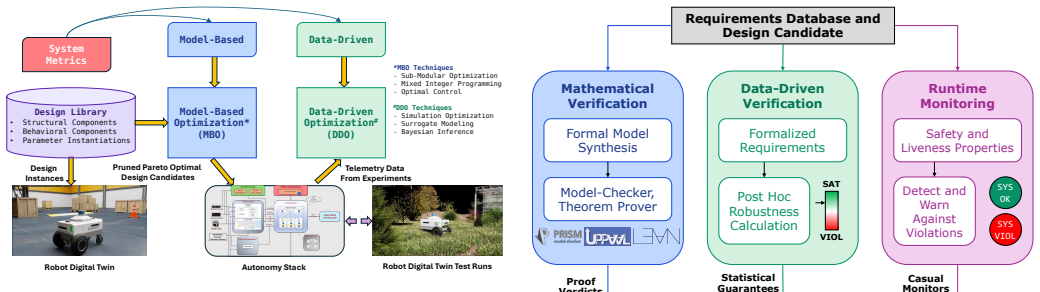
- Design-space exploration decomposes into a model-based optimization stage followed by data-driven evaluation via TRADES-X.
- Formal, data-driven, and runtime verification combine into one assurance workflow via VERITAS.
- The full lifecycle from sensor-suite selection to assured multi-robot coordination can be exercised under a single integrated methodology.
- Reformulation on SysML v2 and KerML foundations enables language-native composability and tighter ML/AI integration.
Where Pith is reading between the lines
- The same loop-at-every-step pattern could be tested on aerial or underwater autonomous vehicles to check domain transfer.
- Releasing the Isaac Sim test range alongside the toolchain creates an open benchmark for comparing hybrid versus pure model-based or pure data-driven pipelines.
- If the hybrid trade-off architecture scales, it could shorten certification timelines for safety-critical AI systems by providing traceable data-driven evidence at each V-process gate.
- Native support in SysML v2 might allow direct embedding of learned models as first-class modeling elements rather than external add-ons.
Load-bearing premise
Adding a data-driven loop at every step of the MBSE V-process will preserve the original rigor and trustworthiness while successfully incorporating ML and AI without creating inconsistencies or new failure modes.
What would settle it
An autonomous system developed with IDDMBSE that exhibits a safety or performance failure traceable to an undetected inconsistency between its model-based and data-driven components during the V-process.
Figures





read the original abstract
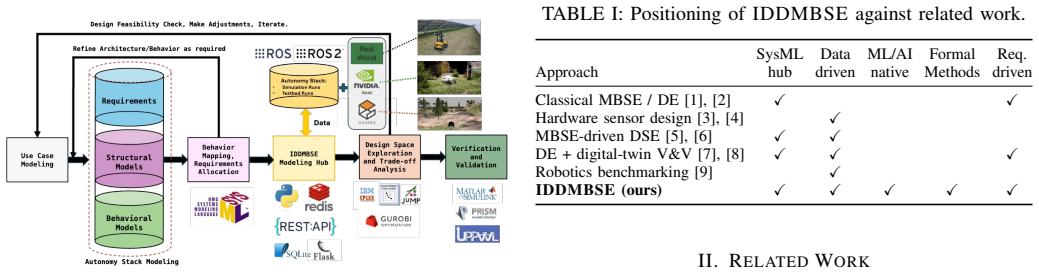
Autonomous cyber-physical systems (CPS) sit at the intersection of Model-Based Systems Engineering (MBSE) and data-driven Machine Learning and Artificial Intelligence (ML/AI), yet no integrated Systems Engineering (SE) methodology natively spans both. We address this gap with IDDMBSE, an Integrated Data-Driven and Model-Based Systems Engineering methodology that extends the rigorous MBSE V-process with a data-driven loop at every step, anchored in SysML, the autonomy stack, and a hybrid model-based plus data-driven trade-off architecture. We instantiate IDDMBSE as an interoperable, open-source tool chain: PERFECT, which maps SysML system architectures to executable ROS autonomy stacks for scalable performance evaluation; TRADES-X, which decomposes design-space exploration into a model-based optimization stage followed by a data-driven evaluation stage; and VERITAS, which combines formal, data-driven, and runtime verification into a single assurance workflow. We demonstrate IDDMBSE on a Trusted Autonomous Ground Robot across its development lifecycle, spanning sensor-suite selection, risk-sensitive path planning, behavior-tree task verification, conformal-prediction-based robust perception, and assured multi-robot coordination, all exercised in a contested-terrain Isaac Sim test range that we release with the tool chain. We close by sketching how IDDMBSE is being re-formulated on SysML v2 / KerML foundations to enable language-native composability and tighter ML/AI integration.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes IDDMBSE, a methodology that extends the standard MBSE V-process by adding a data-driven loop at every step to integrate model-based systems engineering with ML/AI for trusted autonomous cyber-physical systems. The approach is anchored in SysML, an autonomy stack, and a hybrid trade-off architecture. It is instantiated via three interoperable open-source tools: PERFECT (SysML-to-ROS mapping for performance evaluation), TRADES-X (model-based optimization followed by data-driven evaluation), and VERITAS (combined formal, data-driven, and runtime verification). The methodology is demonstrated across the full lifecycle of a Trusted Autonomous Ground Robot, including sensor-suite selection, risk-sensitive path planning, behavior-tree verification, conformal-prediction perception, and multi-robot coordination, exercised in a released Isaac Sim contested-terrain test range. The paper closes with a sketch of reformulation on SysML v2 / KerML.
Significance. If the integration mechanism can be shown to preserve MBSE rigor while incorporating data-driven elements without new inconsistencies or failure modes, the work would provide a concrete, tool-supported bridge between traditional systems engineering and ML/AI for autonomous CPS. The open-source toolchain and released simulation environment are positive contributions that could enable reproducibility and further experimentation in the field.
major comments (2)
- [Abstract and §3] Abstract and §3 (IDDMBSE definition): the central claim that inserting a data-driven loop at every V-process step preserves the rigor and trustworthiness of traditional MBSE while incorporating ML/AI is presented without an explicit integration mechanism, invariant, or consistency argument. The description of TRADES-X and VERITAS stages does not show how data-driven evaluations are prevented from bypassing or weakening model-based validation steps.
- [Demonstration section] Demonstration section (robot lifecycle): the claims of assured sensor selection, path planning, perception, and coordination are supported only by qualitative descriptions of the workflow. No quantitative metrics, error rates, verification coverage numbers, or comparison against baseline MBSE or pure data-driven approaches are reported, leaving the trustworthiness claims unsupported by evidence.
minor comments (2)
- [§3] The paper would benefit from a dedicated section or table that explicitly maps each V-process step to its corresponding data-driven loop and tool instantiation.
- [§4] Notation for the hybrid trade-off architecture should be introduced earlier and used consistently when describing PERFECT, TRADES-X, and VERITAS.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We address each major comment below and indicate planned revisions to strengthen the presentation of the integration mechanism and supporting evidence.
read point-by-point responses
-
Referee: [Abstract and §3] Abstract and §3 (IDDMBSE definition): the central claim that inserting a data-driven loop at every V-process step preserves the rigor and trustworthiness of traditional MBSE while incorporating ML/AI is presented without an explicit integration mechanism, invariant, or consistency argument. The description of TRADES-X and VERITAS stages does not show how data-driven evaluations are prevented from bypassing or weakening model-based validation steps.
Authors: The integration is realized through the explicit sequencing in the hybrid trade-off architecture: TRADES-X performs model-based optimization first, with data-driven evaluation applied only to the resulting candidate set under model-derived constraints; VERITAS requires formal verification results to be produced alongside data-driven and runtime checks, with model-based artifacts serving as the reference for consistency. The SysML anchor further enforces that all data-driven outputs are interpreted against the original architecture model. We agree an explicit invariant statement would improve clarity and will add a short subsection in §3 formalizing the consistency argument and bypass-prevention rules. revision: yes
-
Referee: [Demonstration section] Demonstration section (robot lifecycle): the claims of assured sensor selection, path planning, perception, and coordination are supported only by qualitative descriptions of the workflow. No quantitative metrics, error rates, verification coverage numbers, or comparison against baseline MBSE or pure data-driven approaches are reported, leaving the trustworthiness claims unsupported by evidence.
Authors: The demonstration section is intended to show the end-to-end instantiation of IDDMBSE across the robot lifecycle using the released open-source tools and Isaac Sim environment. While quantitative results (e.g., path success rates, conformal-prediction coverage, verification coverage) exist in the supporting artifacts, they are not tabulated in the current text. We will revise the demonstration section to include selected quantitative metrics and brief comparisons against the pure model-based baseline where the data are available. revision: yes
Circularity Check
No circularity: descriptive methodology proposal with no derivations or fitted predictions.
full rationale
The paper proposes IDDMBSE as an extension of the MBSE V-process with data-driven loops, instantiated via tools PERFECT, TRADES-X, and VERITAS, and demonstrated on a ground robot case study. No equations, parameters, or quantitative derivations appear in the provided text. The central claims are architectural and descriptive rather than computed results that could reduce to inputs by construction. No self-citations are invoked as load-bearing uniqueness theorems or ansatzes. The work is self-contained as a systems-engineering framework without mathematical prediction chains.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Friedenthal, A
S. Friedenthal, A. Moore, and R. Steiner,A practical guide to SysML: the systems modeling language. Morgan Kaufmann, 2014
2014
-
[2]
INCOSE,INCOSE Systems Engineering Handbook, 5th ed., Inter- national Council on Systems Engineering, Hoboken, NJ, 2023, see https://www.incose.org/products-and-publications/se-handbook
2023
-
[3]
Boxi: Design decisions in the context of algorithmic performance for robotics,
J. Frey, T. Tuna, L. F. T. Fu, C. Weibel, K. Patterson, B. Krummenacher, M. M ¨uller, J. Nubert, M. Fallon, C. Cadenaet al., “Boxi: Design decisions in the context of algorithmic performance for robotics,”arXiv preprint arXiv:2504.18500, 2025
arXiv 2025
-
[4]
Codei: Resource-efficient task-driven codesign of perception and decision mak- ing for mobile robots applied to autonomous vehicles,
D. Milojevic, G. Zardini, M. Elser, A. Censi, and E. Frazzoli, “Codei: Resource-efficient task-driven codesign of perception and decision mak- ing for mobile robots applied to autonomous vehicles,”IEEE Transac- tions on Robotics, vol. 41, pp. 2727–2748, 2025
2025
-
[5]
Early design space exploration with model-based system engineering and set- based design,
E. Specking, G. Parnell, E. Pohl, and R. Buchanan, “Early design space exploration with model-based system engineering and set- based design,”Systems, vol. 6, no. 4, 2018. [Online]. Available: https://www.mdpi.com/2079-8954/6/4/45
2018
-
[6]
Model-driven design space exploration for multi-robot systems in simulation,
J. Harbin, S. Gerasimou, N. Matragkas, T. Zolotas, R. Calinescu, and M. A. Santana, “Model-driven design space exploration for multi-robot systems in simulation,”Software and Systems Modeling, vol. 22, pp. 1665–1688, 2022
2022
-
[7]
A systematic digital engineering approach to verification & validation of autonomous ground vehicles in off-road environments,
T. Samak, C. Samak, J. Brault, C. Harber, K. McCane, J. Smereka, M. Brudnak, D. Gorsich, and V . Krovi, “A systematic digital engineering approach to verification & validation of autonomous ground vehicles in off-road environments,”IFAC-PapersOnLine, vol. 59, no. 30, 2025
2025
-
[8]
Model-based system engineering framework for verification and validation of cyber- physical vehicle systems,
J. Coleman, J. Madinni, T. Samak, C. Samak, K. McCane, J. Brault, C. Harber, J. M. Smereka, M. Brudnak, D. Gorsichet al., “Model-based system engineering framework for verification and validation of cyber- physical vehicle systems,”ASME Letters in Translational Robotics, vol. 1, no. 2, p. 024502, 2025
2025
-
[9]
Robotperf: An open-source, vendor-agnostic, benchmarking suite for evaluating robotics computing system performance,
V . Mayoral-Vilches, J. Jabbour, Y .-S. Hsiao, Z. Wan, M. Crespo-´Alvarez, M. Stewart, J. M. Reina-Mu ˜noz, P. Nagras, G. Vikhe, M. Bakhshalipour et al., “Robotperf: An open-source, vendor-agnostic, benchmarking suite for evaluating robotics computing system performance,” in2024 IEEE ICRA. IEEE, 2024, pp. 8288–8297
2024
-
[10]
Future of Systems Engineering (FuSE) Initiative,
INCOSE, “Future of Systems Engineering (FuSE) Initiative,” 2022, international Council on Systems Engineering. https://www.incose.org/ about-systems-engineering/fuse
2022
-
[11]
Department of Defense Digital Engineer- ing Strategy,
U.S. Department of Defense, “Department of Defense Digital Engineer- ing Strategy,” 2018, office of the Deputy Assistant Secretary of Defense for Systems Engineering
2018
-
[12]
OMG Systems Modeling Language (SysML), Version 2,
Object Management Group, “OMG Systems Modeling Language (SysML), Version 2,” 2024, oMG specification. https://www.omg.org/ spec/SysML/2.0/
2024
-
[13]
Model-based systems engineering applied to the detection and correction of object slippage within a dexterous robotic hand,
C. A. Meehan and J. S. Baras, “Model-based systems engineering applied to the detection and correction of object slippage within a dexterous robotic hand,” in2021 IEEE Int. SysCon, 2021, pp. 1–13
2021
-
[14]
Model-based systems engineering simulation framework for robot grasping,
P. K. M. Sekar and J. S. Baras, “Model-based systems engineering simulation framework for robot grasping,” inINCOSE International Symposium, vol. 32. Wiley Online Library, 2022, pp. 82–89
2022
-
[15]
A fresh look at network science: Interdependent multigraphs models inspired from statistical physics,
J. S. Baras, “A fresh look at network science: Interdependent multigraphs models inspired from statistical physics,” in6th ISCCSP. IEEE, 2014
2014
-
[16]
Cps modeling integration hub and design space exploration with application to microrobotics,
Y . Zhou and J. S. Baras, “Cps modeling integration hub and design space exploration with application to microrobotics,” inControl of Cyber- Physical Systems, JHU. Springer, 2013, pp. 23–42
2013
-
[17]
Extending design capabilities of sysml with trade-off analysis: electrical microgrid case study,
D. Spyropoulos and J. S. Baras, “Extending design capabilities of sysml with trade-off analysis: electrical microgrid case study,”Procedia Computer Science, vol. 16, pp. 108–117, 2013
2013
-
[18]
Integrated modeling and simulation frame- work for wireless sensor networks,
B. Wang and J. S. Baras, “Integrated modeling and simulation frame- work for wireless sensor networks,” in21st International Workshop on Enabling Technologies. IEEE, 2012, pp. 268–273
2012
-
[19]
Easing adoption of Model- Based Systems Engineering with application of generative AI,
K. Patel, A. Maheshwaran, and S. Santhya, “Easing adoption of Model- Based Systems Engineering with application of generative AI,” inProc. 10th IEEE Int. Symp. Syst. Eng. (ISSE), Perugia, Italy, 2024, iEEE Xplore document 10667868
2024
-
[20]
Think-on-graph: Deep and responsible reasoning of large language model on knowledge graph,
J. Sun, “Think-on-graph: Deep and responsible reasoning of large language model on knowledge graph,” 2024. [Online]. Available: https://arxiv.org/abs/2307.07697
arXiv 2024
-
[21]
A tutorial on uppaal,
G. Behrmann, A. David, and K. G. Larsen, “A tutorial on uppaal,” Formal methods for the design of real-time systems, pp. 200–236, 2004
2004
-
[22]
Formal verifica- tion of ros-based robotic applications using timed-automata,
R. Halder, J. Proenc ¸a, N. Macedo, and A. Santos, “Formal verifica- tion of ros-based robotic applications using timed-automata,” in2017 IEEE/ACM 5th International FME Workshop on Formal Methods in Software Engineering (FormaliSE), 2017, pp. 44–50
2017
-
[23]
Verification and validation of autonomy software at nasa,
C. Pecheur, “Verification and validation of autonomy software at nasa,” NASA, Tech. Rep., 2000
2000
-
[24]
A survey of automated techniques for formal software verification,
V . D’silva, D. Kroening, and G. Weissenbacher, “A survey of automated techniques for formal software verification,”IEEE Tr. CAD of Integr. Circuits and Systems, vol. 27, no. 7, pp. 1165–1178, 2008
2008
-
[25]
Drechsler,Advanced formal verification
R. Drechsler,Advanced formal verification. Springer, 2004
2004
-
[26]
Integrated data-driven and model-based trade-off analysis of sensor suite system for autonomous ground vehicle navigation,
S. S. Damera, P. Kumar, and J. S. Baras, “Integrated data-driven and model-based trade-off analysis of sensor suite system for autonomous ground vehicle navigation,” in2024 IEEE Intern. ISSE, 2024, pp. 1–8
2024
-
[27]
Robust Stochas- tic Shortest-Path Planning via Risk-Sensitive Incremental Sampling,
C. Enwerem, E. Noorani, J. S. Baras, and B. M. Sadler, “Robust Stochas- tic Shortest-Path Planning via Risk-Sensitive Incremental Sampling,” Aug. 2024, arXiv:2408.08668
arXiv 2024
-
[28]
Prob- abilistic roadmaps for path planning in high-dimensional configuration spaces,
L. E. Kavraki, P. Svestka, J.-C. Latombe, and M. H. Overmars, “Prob- abilistic roadmaps for path planning in high-dimensional configuration spaces,”IEEE Tr. Robot. and Autom., vol. 12, no. 4, pp. 566–580, 1996
1996
-
[29]
Rapidly-exploring random trees: Progress and prospects,
S. M. LaValle and J. J. Kuffner, “Rapidly-exploring random trees: Progress and prospects,”Algor. comput. robotics, p. 303, 2001
2001
-
[30]
Iagnemma and S
K. Iagnemma and S. Dubowsky,Mobile Robots in Rough Terrain: Estimation, Motion Planning, and Control with Application to Planetary Rovers, ser. Springer Tracts in Advanced Robotics. Springer, 2004
2004
-
[31]
Rtamt–runtime robustness monitors with application to cps and robotics,
T. Yamaguchi, B. Hoxha, and D. Ni ˇckovi´c, “Rtamt–runtime robustness monitors with application to cps and robotics,”International Journal on Software Tools for Technology Transfer, vol. 26, no. 1, pp. 79–99, 2024
2024
-
[32]
Bt2automata: Expressing behavior trees as automata for formal control synthesis,
R. Matheu, A. G. Puranic, J. S. Baras, and C. Belta, “Bt2automata: Expressing behavior trees as automata for formal control synthesis,” inProceedings of the 28th ACM International Conference on Hybrid Systems: Computation and Control, 2025, pp. 1–11
2025
-
[33]
Omtbt: Online monitoring of temporal behavior trees with applications to closed-loop learning,
R. Matheu, A. G. Puranic, J. S. Baras, and C. Belta, “Omtbt: Online monitoring of temporal behavior trees with applications to closed-loop learning,” in2025 European Control Conference (ECC). IEEE, 2025, pp. 2129–2135
2025
-
[34]
Conformal prediction: A gentle introduction,
A. N. Angelopoulos and S. Bates, “Conformal prediction: A gentle introduction,”Foundations and Trends in Machine Learning, vol. 16, no. 4, pp. 494–591, 2023
2023
-
[35]
Perceive with confidence: Statistical safety assurances for navigation with learning-based perception,
Z. Mei, A. Dixit, M. Booker, E. Zhou, M. Storey-Matsutani, A. Z. Ren, O. Shorinwa, and A. Majumdar, “Perceive with confidence: Statistical safety assurances for navigation with learning-based perception,”The International Journal of Robotics Research, vol. 45, no. 6, pp. 938– 967, 2026
2026
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.