Digital-to-Physical Transfer of Adversarial Patches for Aerial Vehicle Detection
Pith reviewed 2026-06-28 23:04 UTC · model grok-4.3
The pith
Adversarial patches optimized digitally transfer to physical attacks on aerial vehicle detectors, with on-vehicle placement showing greater robustness than off-vehicle placement.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
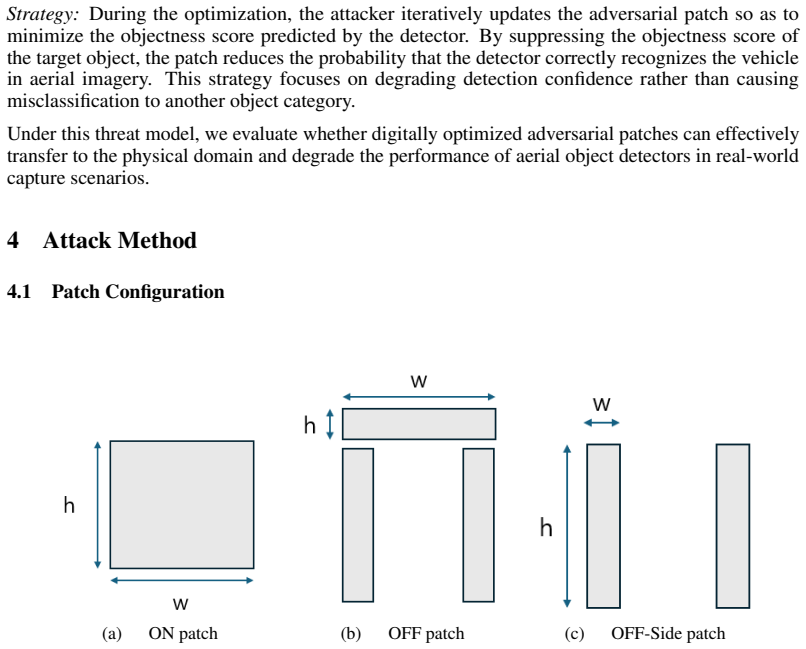
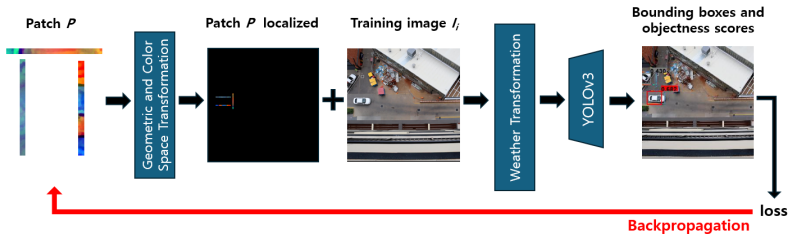
Adversarial patches are optimized digitally by minimizing the maximum objectness score of a YOLOv3 detector while adding non-printability score and total variation terms to promote printability and smoothness; when printed and deployed, the ON placement achieves lower objectness score ratios in physical tests than the OFF placement despite the OFF patch performing best digitally.
What carries the argument
Loss function minimizing maximum objectness score with added non-printability score and total variation constraints.
If this is right
- The OFF configuration reduces objectness most in digital images but loses relative advantage once printed and placed.
- The ON configuration maintains lower objectness score ratios in physical environments because of consistent visibility.
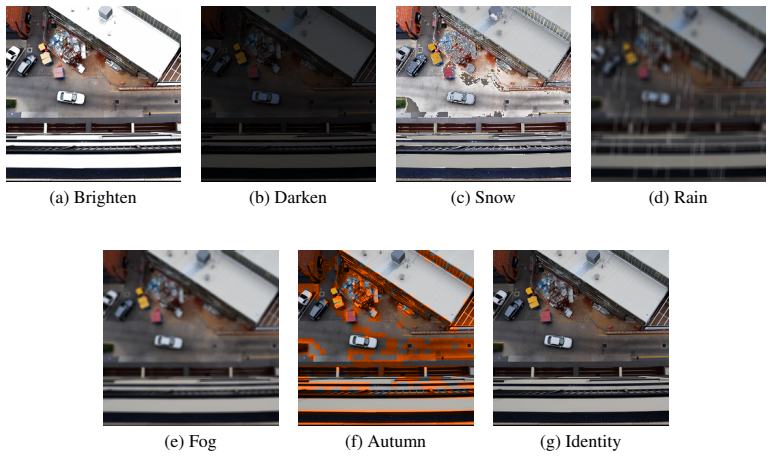
- Weather-based augmentation during digital optimization does not improve physical transfer in the tested cases.
- Physical deployment of such patches constitutes a realistic threat to aerial detection systems used for monitoring.
Where Pith is reading between the lines
- Security evaluations of aerial detectors should include physical placement tests rather than relying solely on digital metrics.
- Different detector architectures or camera resolutions might change which placement configuration transfers most effectively.
- Countermeasures could focus on detecting unusual patterns on vehicle surfaces rather than only on background changes.
Load-bearing premise
Digital optimization with printability and smoothness constraints will produce patches whose attack strength survives the shift to physical conditions without being dominated by unmodeled variables such as lighting or camera angle.
What would settle it
Physical flight tests in which the printed ON patch produces objectness scores above the reported 0.343 ratio across multiple viewing angles and lighting conditions.
Figures
read the original abstract
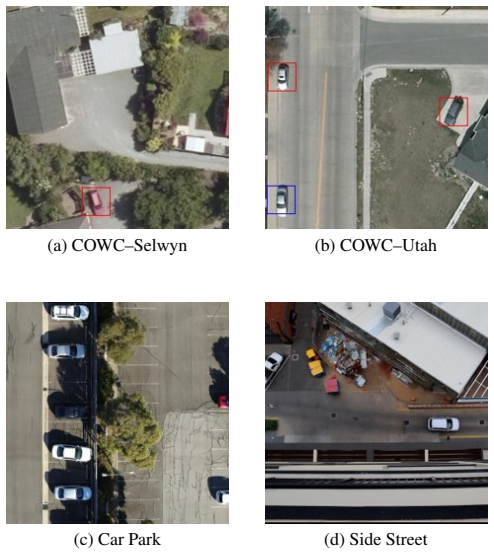
Deep neural network (DNN)-based object detectors are widely used for analyzing aerial and satellite imagery in applications such as environmental monitoring and urban analytics. Despite their strong performance, these models are known to be vulnerable to adversarial examples, and physical adversarial attacks using printable patterns pose realistic security threats. In this paper, we evaluate physical adversarial patch attacks against an aerial vehicle detector by bridging digital optimization and real-world deployment. Adversarial patches are optimized in the digital domain using a loss function that minimizes the maximum objectness score while incorporating non-printability score (NPS) and total variation (TV) constraints to ensure both printability and spatial smoothness. The optimized patches are printed and deployed in three configurations: ON, OFF, and OFF-Side. Experiments using a YOLOv3 detector show that while the OFF patch achieves the highest effectiveness in the digital domain (85.51% Average Objectness Reduction Rate (AORR)), the ON patch demonstrates superior robustness in physical environments (0.197-0.343 Objectness Score Ratio (OSR)) due to its consistent visibility. Furthermore, our results indicate that weather-based augmentation does not necessarily improve patch optimization in this domain. These findings provide critical insights into the practical vulnerabilities of aerial object detection systems.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims to optimize adversarial patches digitally against a YOLOv3 aerial vehicle detector using a loss that minimizes maximum objectness while adding NPS and TV constraints for printability and smoothness. The patches are then printed and tested in three physical configurations (ON, OFF, OFF-Side). Digital results show the OFF patch achieving the highest effectiveness (85.51% AORR), but physical results indicate the ON patch is more robust (OSR 0.197-0.343) due to consistent visibility, and that weather-based augmentation does not improve optimization.
Significance. If the physical transfer results are shown to be robust to unmodeled factors, the work would offer useful empirical data on digital-to-physical gaps in adversarial patch attacks for aerial detection, including the observed ranking reversal between domains.
major comments (2)
- [Abstract] Abstract: the claim that the ON patch demonstrates superior robustness in physical environments (OSR 0.197-0.343) compared to OFF rests on the assumption that relative performance is preserved under physical deployment, yet no variance, sample sizes, or controls are reported for lighting, viewing angle, or distance across the three configurations; if these factors dominate objectness scores, the robustness conclusion and ranking reversal do not follow from the digital loss alone.
- [Abstract] Abstract: the statement that weather-based augmentation does not necessarily improve patch optimization lacks any quantitative comparison (e.g., AORR or loss values with vs. without augmentation) or description of the augmentation procedure, rendering the claim unsupported by the presented evidence.
minor comments (1)
- [Abstract] The abstract reports quantitative results but provides no details on experimental setup, number of images, or detector training data, which should be added for reproducibility.
Simulated Author's Rebuttal
Thank you for your thorough review of our manuscript. We have carefully considered the major comments and provide point-by-point responses below. We will revise the manuscript accordingly to address the concerns raised.
read point-by-point responses
-
Referee: [Abstract] Abstract: the claim that the ON patch demonstrates superior robustness in physical environments (OSR 0.197-0.343) compared to OFF rests on the assumption that relative performance is preserved under physical deployment, yet no variance, sample sizes, or controls are reported for lighting, viewing angle, or distance across the three configurations; if these factors dominate objectness scores, the robustness conclusion and ranking reversal do not follow from the digital loss alone.
Authors: The physical experiments involved repeated trials across the configurations to account for variability in real-world conditions. However, we recognize that the abstract does not explicitly report sample sizes or variance. In the revised manuscript, we will update the abstract to include these details, such as the number of physical tests performed and the range of distances and angles used. The observed OSR values are averages from these experiments, supporting the robustness claim for the ON configuration. We will also clarify that while unmodeled factors could influence results, the consistent visibility of the ON patch contributed to its performance. revision: yes
-
Referee: [Abstract] Abstract: the statement that weather-based augmentation does not necessarily improve patch optimization lacks any quantitative comparison (e.g., AORR or loss values with vs. without augmentation) or description of the augmentation procedure, rendering the claim unsupported by the presented evidence.
Authors: We agree that the claim in the abstract requires supporting quantitative evidence to be fully substantiated. The manuscript describes the weather augmentation procedure in the methods, but we will revise the abstract to include a direct comparison, for instance by stating the AORR achieved with and without the augmentation. This will make the statement evidence-based. revision: yes
Circularity Check
No circularity: empirical optimization and physical transfer results are self-contained
full rationale
The paper describes a standard adversarial patch optimization pipeline (loss minimizing max objectness + NPS + TV constraints) followed by physical printing and testing on YOLOv3. Results (digital AORR, physical OSR) are reported as direct experimental outcomes across ON/OFF/OFF-Side configurations. No equations, uniqueness theorems, or predictions are presented that reduce by construction to fitted inputs or self-citations. The central claims rest on measured transfer performance rather than any definitional or self-referential step.
Axiom & Free-Parameter Ledger
free parameters (1)
- Weights in the combined loss function for objectness, NPS, and TV
axioms (1)
- domain assumption Digital adversarial optimization with printability constraints transfers to physical world performance
Reference graph
Works this paper leans on
-
[1]
YOLOv3: An Incremental Improvement
Redmon, J.; Farhadi, A. YOLOv3: An incremental improvement. arXiv 2018, arXiv:1804.02767
work page internal anchor Pith review Pith/arXiv arXiv 2018
-
[2]
Microsoft COCO: Common objects in context
Lin, T.-Y .; Maire, M.; Belongie, S.; Hays, J.; Perona, P.; Ramanan, D.; Dollar, P.; Zitnick, C.L. Microsoft COCO: Common objects in context. In Proceedings of the European Conference on Computer Vision (ECCV), Zurich, Switzerland, 6–12 September 2014; pp. 740–755
2014
-
[3]
A large contextual dataset for classi- fication, detection and counting of cars with deep learning
Mundhenk, T.N.; Konjevod, G.; Sakla, W.A.; Boakye, K. A large contextual dataset for classi- fication, detection and counting of cars with deep learning. In Proceedings of the European Conference on Computer Vision (ECCV), Amsterdam, The Netherlands, 11–14 October 2016; pp. 785–800
2016
-
[4]
Using convolutional networks and satellite imagery to identify patterns in urban environments at a large scale
Albert, A.; Kaur, J.; Gonzalez, M.C. Using convolutional networks and satellite imagery to identify patterns in urban environments at a large scale. In Proceedings of the 23rd ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, Halifax, NS, Canada, 13–17 August 2017
2017
-
[5]
Vehicle detection in remote sensing images leveraging on simultaneous super-resolution.IEEE Geoscience and Remote Sensing Letters2019,17, 676–680
Ji, H.; Gao, Z.; Mei, T.; Ramesh, B. Vehicle detection in remote sensing images leveraging on simultaneous super-resolution.IEEE Geoscience and Remote Sensing Letters2019,17, 676–680
-
[6]
Poly kernel inception network for remote sensing detection
Cai, X.; Lai, Q.; Wang, Y .; Wang, W.; Sun, Z.; Yao, Y . Poly kernel inception network for remote sensing detection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2024; pp. 27706–27716
2024
-
[7]
MutDet: Mutually optimizing pre-training for remote sensing object detection
Huang, Z.; Feng, Y .; Liu, Q.; Wang, Y . MutDet: Mutually optimizing pre-training for remote sensing object detection. In Proceedings of the European Conference on Computer Vision (ECCV), Cham, Switzerland, September 2024; Springer Nature Switzerland; pp. 1–17
2024
-
[8]
Explaining and Harnessing Adversarial Examples
Goodfellow, I.J.; Shlens, J.; Szegedy, C. Explaining and harnessing adversarial examples. arXiv 2014, arXiv:1412.6572. 16
work page internal anchor Pith review Pith/arXiv arXiv 2014
-
[9]
DeepFool: A simple and accurate method to fool deep neural networks
Moosavi-Dezfooli, S.M.; Fawzi, A.; Frossard, P. DeepFool: A simple and accurate method to fool deep neural networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV , USA, 27–30 June 2016
2016
-
[10]
Universal adversarial perturbations
Moosavi-Dezfooli, S.M.; Fawzi, A.; Frossard, P. Universal adversarial perturbations. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017
2017
-
[11]
Towards evaluating the robustness of neural networks
Carlini, N.; Wagner, D. Towards evaluating the robustness of neural networks. In Proceedings of the IEEE Symposium on Security and Privacy (SP), San Jose, CA, USA, 22–26 May 2017
2017
-
[12]
Adversarial examples in the physical world
Kurakin, A.; Goodfellow, I.J.; Bengio, S. Adversarial examples in the physical world. In Artificial Intelligence Safety and Security; Chapman and Hall/CRC: Boca Raton, FL, USA, 2018; pp. 99–112
2018
-
[13]
Brown, T.B.; Mane, D.; Roy, A.; Abadi, M.; Gilmer, J. Adversarial patch. arXiv 2017, arXiv:1712.09665
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[14]
AdvHat: Real-world adversarial attack on ArcFace face ID system
Komkov, S.; Petiushko, A. AdvHat: Real-world adversarial attack on ArcFace face ID system. In Proceedings of the 25th International Conference on Pattern Recognition (ICPR), Milan, Italy, 10–15 January 2021
2021
-
[15]
Fooling automated surveillance cameras: Adversarial patches to attack person detection
Thys, S.; Van Ranst, W.; Goedeme, T. Fooling automated surveillance cameras: Adversarial patches to attack person detection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) Workshops, Long Beach, CA, USA, 16–20 June 2019
2019
-
[16]
DAP: A dynamic adversarial patch for evading person detectors
Guesmi, A.; Ding, R.; Hanif, M.A.; Alouani, I.; Shafique, M. DAP: A dynamic adversarial patch for evading person detectors. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2024; pp. 24595–24604
2024
-
[17]
Revisiting adversarial patches for designing camera-agnostic attacks against person detection.Advances in Neural Information Processing Systems2024,37, 8047–8064
Wei, H.; Wang, Z.; Zhang, K.; Hou, J.; Liu, Y .; Tang, H.; Wang, Z. Revisiting adversarial patches for designing camera-agnostic attacks against person detection.Advances in Neural Information Processing Systems2024,37, 8047–8064
-
[18]
PapMOT: Exploring adversarial patch attack against multiple object tracking
Long, J.; Jiang, T.; Yao, W.; Jia, S.; Zhang, W.; Zhou, W.; Ma, C.; Chen, X. PapMOT: Exploring adversarial patch attack against multiple object tracking. In Proceedings of the European Conference on Computer Vision (ECCV), Cham, Switzerland, September 2024; Springer Nature Switzerland; pp. 128–144
2024
-
[19]
Gradient-reweighted adversarial camouflage for physical object detection evasion
Liang, J.; Liang, S.; Lou, T.; Zhang, M.; Li, W.; Fan, D.; Cao, X. Gradient-reweighted adversarial camouflage for physical object detection evasion. In Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), 2025; pp. 13880–13889
2025
-
[20]
PAD: Patch-agnostic defense against adversarial patch attacks
Jing, L.; Wang, R.; Ren, W.; Dong, X.; Zou, C. PAD: Patch-agnostic defense against adversarial patch attacks. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2024; pp. 24472–24481
2024
-
[21]
Revisiting adversarial patch defenses on object detectors: Unified evaluation, large-scale dataset, and new insights
Zheng, J.; Sun, J.; Lin, C.; Zhao, Z.; Ma, C.; Zhang, C.; Wang, C.; Wang, Q.; Shen, C. Revisiting adversarial patch defenses on object detectors: Unified evaluation, large-scale dataset, and new insights. In Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), 2025; pp. 23476–23486
2025
-
[22]
Note on Attacking Object Detectors with Adversarial Stickers
Eykholt, K.; Evtimov, I.; Fernandes, E.; Li, B.; Song, D.; Kohno, T.; Rahmati, A.; Prakash, A.; Tramer, F. Note on attacking object detectors with adversarial stickers. arXiv 2017, arXiv:1712.08062
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[23]
Physical adversarial examples for object detectors
Song, D.; Eykholt, K.; Evtimov, I.; Fernandes, E.; Li, B.; Rahmati, A.; Tramer, F.; Prakash, A.; Kohno, T. Physical adversarial examples for object detectors. In Proceedings of the 12th USENIX Workshop on Offensive Technologies (WOOT 18), Baltimore, MD, USA, 13 August 2018
2018
-
[24]
ShapeShifter: Robust physical adversarial attack on Faster R-CNN object detector
Chen, S.-T.; Cornelius, C.; Martin, J.; Chau, D.H.P. ShapeShifter: Robust physical adversarial attack on Faster R-CNN object detector. In Joint European Conference on Machine Learning and Knowledge Discovery in Databases (ECML PKDD), Dublin, Ireland, 10–14 September 2018. 17
2018
-
[25]
On physical adversarial patches for object detection
Lee, M.; Kolter, Z. On physical adversarial patches for object detection. In Proceedings of the ICML Workshop on Security and Privacy of Machine Learning, Long Beach, CA, USA, 9–15 June 2019
2019
-
[26]
Adversarial patch camouflage against aerial detection
Den Hollander, R.; Adhikari, A.; Tolios, I.; van Bekkum, M.; Bal, A.; Hendriks, S.; Kruithof, M.; Gross, D.; Jansen, N.; Perez, G.; Buurman, K.; Raaijmakers, S. Adversarial patch camouflage against aerial detection. In Artificial Intelligence and Machine Learning in Defense Applications II; SPIE: Bellingham, W A, USA, 2020; V ol. 11543
2020
-
[27]
Adversarial examples in remote sensing
Czaja, W.; Fendley, N.; Pekala, M.; Ratto, C.; Wang, I.-J. Adversarial examples in remote sensing. In Proceedings of the 26th ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems, Seattle, W A, USA, 6–9 November 2018
2018
-
[28]
Digital-to-physical visual consistency optimization for adversarial patch generation in remote sensing scenes.IEEE Transactions on Geoscience and Remote Sensing2024,62, 1–17
Chen, J.; Zhang, Y .; Liu, C.; Chen, K.; Zou, Z.; Shi, Z. Digital-to-physical visual consistency optimization for adversarial patch generation in remote sensing scenes.IEEE Transactions on Geoscience and Remote Sensing2024,62, 1–17
-
[29]
Physical adversarial background patch against aerial object detection based on Pareto efficiency.IEEE Transactions on Geoscience and Remote Sensing2025
Li, H.; Li, J.; Gong, M.; Yu, H.; Dang, K.; Zhou, Y .; Qin, A.K.; Wu, Y . Physical adversarial background patch against aerial object detection based on Pareto efficiency.IEEE Transactions on Geoscience and Remote Sensing2025
-
[30]
Physical adversarial attacks on an aerial imagery object detector
Du, A.; Chen, B.; Chin, T.-J.; Law, Y .W.; Sasdelli, M.; Rajasegaran, R.; Campbell, D. Physical adversarial attacks on an aerial imagery object detector. In Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision (WACV), Waikoloa, HI, USA, 3–8 January 2022. 18
2022
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.