AD-MPCC: Adaptive Differentiable Model Predictive Contouring Control for Autonomous Racing
Pith reviewed 2026-07-02 18:55 UTC · model grok-4.3
The pith
AD-MPCC adapts model predictive contouring control online to changing road surfaces by estimating tire parameters and tuning objective weights via a differentiable formulation.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
AD-MPCC integrates online parameter estimation of the Pacejka Magic Formula through a regularized moving-horizon scheme with exponentially decaying weights and a differentiable MPCC framework whose objective weights are tuned by a Pacejka-informed supervised model; the resulting closed-loop system reliably preserves safety and reduces lap times relative to baseline controllers across single-surface and multi-surface scenarios.
What carries the argument
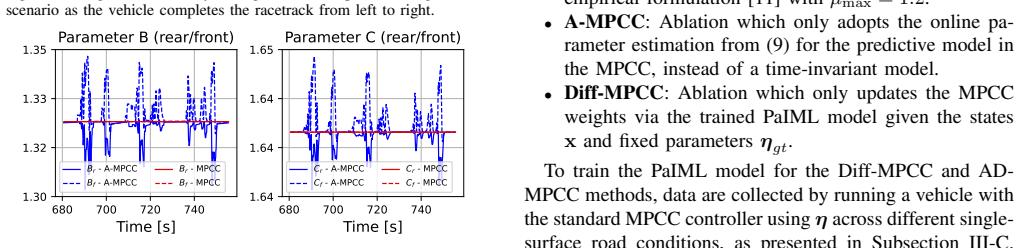
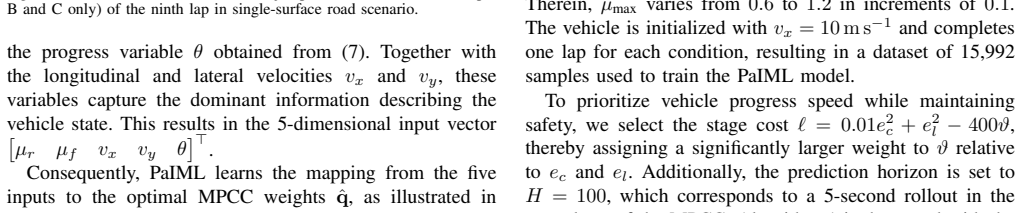
Differentiable MPCC (Diff-MPCC) that back-propagates through long-horizon performance costs to adjust objective weights, supported by real-time Pacejka parameter estimates.
If this is right
- Road parameters can be refreshed in real time without stopping the vehicle.
- Objective weights inside the MPCC are adjusted automatically from long-horizon cost data.
- The same architecture produces faster laps while keeping safety margins on both uniform and varying surfaces.
- The supervised learning step removes the need for hand-tuned weights after each surface change.
Where Pith is reading between the lines
- The supervised model trained on Diff-MPCC data could be replaced by direct gradient descent on hardware if real-time differentiation becomes feasible.
- The exponential decay weighting in the estimator may generalize to other time-varying parameter problems such as battery state estimation.
- Extending the method to include explicit uncertainty bounds on the estimated parameters would allow formal safety certificates.
Load-bearing premise
The parameterized Pacejka Magic Formula together with regularized moving-horizon estimation accurately captures road interactions and can be updated fast enough to support controller adaptation.
What would settle it
A closed-loop simulation or hardware test in which the estimated friction parameters diverge from measured tire forces by more than 15 percent and the vehicle either violates safety constraints or records slower laps than the non-adaptive baseline.
Figures

read the original abstract
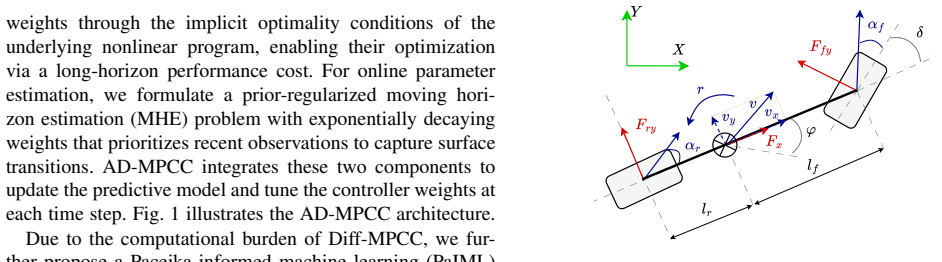
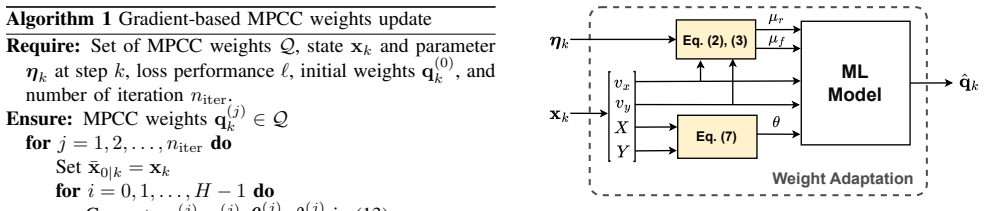
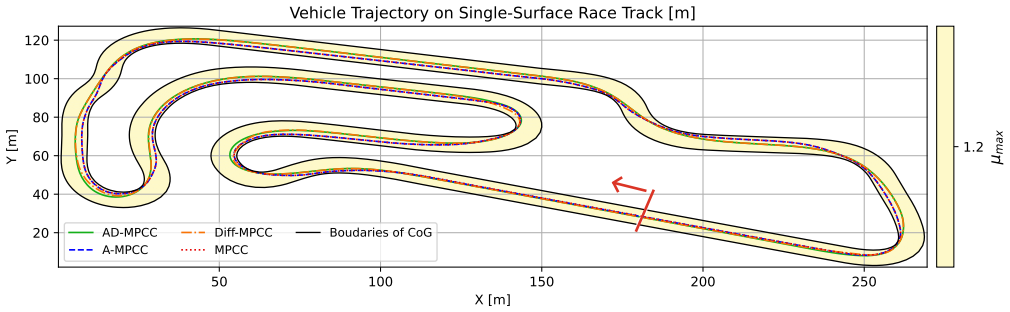
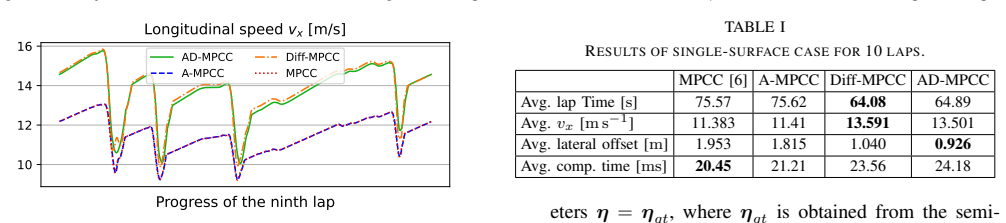
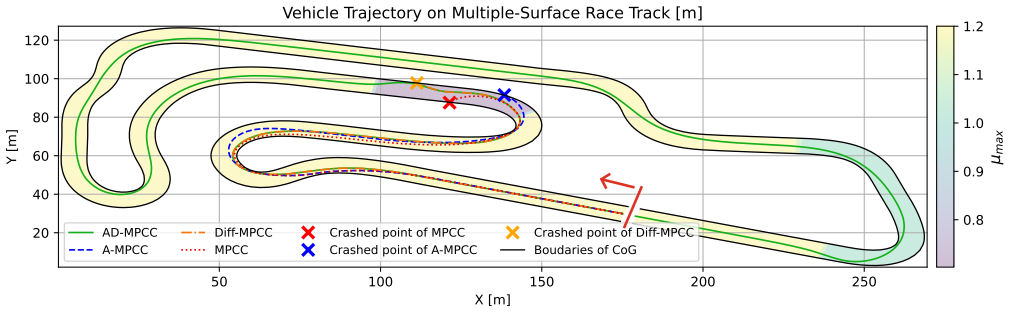
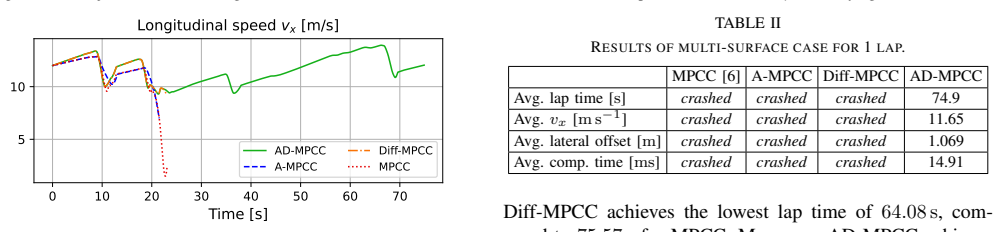
This paper presents Adaptive Differentiable Model Predictive Contouring Control (AD-MPCC), a framework for autonomous racing that integrates differentiable MPCC with online parameter estimation to handle varying road-surface conditions. For online parameter estimation, we leverage a parameterized Pacejka Magic Formula together with a regularized moving-horizon estimation scheme with exponentially decaying weights to capture road interactions and update parameters in real time. Furthermore, we propose a differentiable MPCC (Diff-MPCC) framework that enables optimal adjustment of objective weights based on predefined long-horizon performance costs. To implement Diff-MPCC for online objective weight adaptation, we propose a Pacejka-informed machine learning model that is trained in a supervised manner using data generated by Diff-MPCC to tune the objective weights. Simulation results demonstrate that AD-MPCC reliably ensures safety and achieves faster lap times compared to baseline controllers in both single-surface and multiple-surface scenarios.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents AD-MPCC, a framework integrating differentiable model predictive contouring control (Diff-MPCC) with online parameter estimation via a parameterized Pacejka Magic Formula and regularized moving-horizon estimation (MHE) using exponentially decaying weights. A supervised ML model trained on Diff-MPCC-generated data is used to adapt objective weights for long-horizon performance. The central claim is that simulation results show AD-MPCC ensures safety and achieves faster lap times versus baselines in both single-surface and multi-surface scenarios.
Significance. If the MHE recovers friction parameters with low error and sufficient speed to enable effective weight adaptation before regime changes, and if the reported lap-time/safety gains are attributable to this mechanism rather than unstated factors, the work would offer a concrete advance in adaptive, differentiable MPC for autonomous racing under uncertain road conditions. The combination of online estimation with differentiable optimization and supervised weight tuning is a plausible direction, but its impact is limited by the absence of supporting estimator diagnostics in the presented results.
major comments (2)
- [Simulation results / §V] Simulation results (abstract and §V): no estimation-error metrics, convergence bounds, or noise-sensitivity analysis are reported for the regularized MHE with exponentially decaying weights when surface friction changes. Without these, the performance delta versus baselines cannot be attributed to the adaptation mechanism, undermining the central claim that AD-MPCC reliably handles multi-surface scenarios.
- [§IV / abstract] Method description of online parameter estimation (abstract and §IV): the claim that the parameterized Pacejka MHE “updates parameters in real time” to support Diff-MPCC weight adaptation is load-bearing, yet no quantitative validation (e.g., parameter recovery error during multi-surface runs) is provided to confirm the estimator operates within the time scale required by the controller.
minor comments (2)
- [abstract] The abstract states “simulation results demonstrate” the claims but supplies no details on experimental setup, baselines, statistical significance, or training-data generation for the Pacejka-informed ML model; these should be added for reproducibility.
- [§IV] Notation for the regularized MHE cost and the exponentially decaying weights is introduced without an explicit equation reference; adding numbered equations would improve clarity.
Simulated Author's Rebuttal
We thank the referee for the constructive comments highlighting the need for quantitative validation of the online parameter estimation. We address each major comment below and will revise the manuscript accordingly to include the requested diagnostics.
read point-by-point responses
-
Referee: Simulation results (abstract and §V): no estimation-error metrics, convergence bounds, or noise-sensitivity analysis are reported for the regularized MHE with exponentially decaying weights when surface friction changes. Without these, the performance delta versus baselines cannot be attributed to the adaptation mechanism, undermining the central claim that AD-MPCC reliably handles multi-surface scenarios.
Authors: We agree that the manuscript currently lacks explicit estimation-error metrics, convergence bounds, and noise-sensitivity analysis for the MHE under surface changes. This omission makes it difficult to directly attribute performance gains to the adaptation mechanism. In the revised version, we will add these metrics, including parameter recovery errors for the Pacejka coefficients during multi-surface simulations, along with relevant convergence and sensitivity results where feasible. revision: yes
-
Referee: Method description of online parameter estimation (abstract and §IV): the claim that the parameterized Pacejka MHE “updates parameters in real time” to support Diff-MPCC weight adaptation is load-bearing, yet no quantitative validation (e.g., parameter recovery error during multi-surface runs) is provided to confirm the estimator operates within the time scale required by the controller.
Authors: We acknowledge that the current manuscript does not provide quantitative validation, such as parameter recovery errors or timing measurements, to confirm real-time operation of the MHE within the controller's time scale. We will incorporate these diagnostics in the revised manuscript, drawing from the existing simulation data to demonstrate that the estimator updates occur at a sufficient rate for the multi-surface scenarios. revision: yes
Circularity Check
No significant circularity in derivation chain
full rationale
The paper proposes Diff-MPCC for optimal weight adjustment, generates training data from it, and trains a supervised Pacejka-informed ML model for online adaptation; this is a standard supervised learning pipeline with no reduction of predictions to fitted inputs by construction. Online estimation uses a parameterized Pacejka formula with regularized MHE, presented as an independent modeling choice. No self-citations, uniqueness theorems, or ansatzes are invoked in a load-bearing way that collapses the central claims. Simulation results are presented as empirical comparisons and remain externally falsifiable.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Autonomous vehicles on the edge: A survey on autonomous vehicle racing,
J. Betz, H. Zheng, A. Liniger, U. Rosolia, P. Karle, M. Behl, V . Krovi, and R. Mangharam, “Autonomous vehicles on the edge: A survey on autonomous vehicle racing,”IEEE Open Journal of Intelligent Transportation Systems, vol. 3, pp. 458–488, 2022
2022
-
[2]
A benchmark comparison of imitation learning-based control policies for autonomous racing,
X. Sun, M. Zhou, Z. Zhuang, S. Yang, J. Betz, and R. Mangharam, “A benchmark comparison of imitation learning-based control policies for autonomous racing,” in2023 IEEE Intelligent V ehicles Symposium (IV), 2023, pp. 1–5
2023
-
[3]
Enhancing safety in au- tonomous racing with constrained reinforcement learning,
K. Yu, M. Fu, T. Zhang, and Y . Yang, “Enhancing safety in au- tonomous racing with constrained reinforcement learning,”IEEE Robotics and Automation Letters, vol. 10, no. 6, pp. 6448–6455, 2025
2025
-
[4]
SIT-LMPC: safe information-theoretic learning model predictive control for iterative tasks,
Z. Zang, A. Amine, N.-M. T. Kokolakis, T. X. Nghiem, U. Rosolia, and R. Mangharam, “SIT-LMPC: safe information-theoretic learning model predictive control for iterative tasks,”IEEE Robotics and Automation Letters, vol. 11, no. 1, pp. 986–993, 2026
2026
-
[5]
Model predictive contouring control,
D. Lam, C. Manzie, and M. Good, “Model predictive contouring control,” in49th IEEE Conference on Decision and Control (CDC), Dec. 2010, pp. 6137–6142, iSSN: 0191-2216
2010
-
[6]
Optimization-based au- tonomous racing of 1: 43 scale RC cars,
A. Liniger, A. Domahidi, and M. Morari, “Optimization-based au- tonomous racing of 1: 43 scale RC cars,”Optimal Control Applications and Methods, vol. 36, no. 5, pp. 628–647, 2015
2015
-
[7]
Learning- based model predictive control for autonomous racing,
J. Kabzan, L. Hewing, A. Liniger, and M. N. Zeilinger, “Learning- based model predictive control for autonomous racing,”IEEE Robotics and Automation Letters, vol. 4, no. 4, pp. 3363–3370, 2019
2019
-
[8]
Learning- based model predictive control for autonomous racing,
J. Pinho, G. Costa, P. U. Lima, and M. Ayala Botto, “Learning- based model predictive control for autonomous racing,”World Electric V ehicle Journal, vol. 14, no. 7, p. 163, 2023
2023
-
[9]
Learning-based model predictive control for an autonomous formula student racing car,
D. R. Gomes, M. A. Botto, and P. U. Lima, “Learning-based model predictive control for an autonomous formula student racing car,” in2024 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2024, pp. 12 556–12 562
2024
-
[10]
Learning-based model predictive control: Toward safe learning in control,
L. Hewing, K. P. Wabersich, M. Menner, and M. N. Zeilinger, “Learning-based model predictive control: Toward safe learning in control,”Annual Review of Control, Robotics, and Autonomous Sys- tems, vol. 3, no. 1, pp. 269–296, 2020
2020
-
[11]
Pacejka,Tire and vehicle dynamics
H. Pacejka,Tire and vehicle dynamics. Elsevier, 2005
2005
-
[12]
Differentiable weights-varying nonlinear MPC via gradient- based policy learning: An autonomous vehicle guidance example,
F. Jahncke, B. Zarrouki, M. Piccinini, J. D’sa, D. Isele, S. Bae, and J. Betz, “Differentiable weights-varying nonlinear MPC via gradient- based policy learning: An autonomous vehicle guidance example,” IEEE Robotics and Automation Letters, vol. 11, no. 3, pp. 3724–3731, 2026
2026
-
[13]
Differentiable MPC for end-to-end planning and control,
B. Amos, I. D. J. Rodriguez, J. Sacks, B. Boots, and J. Z. Kolter, “Differentiable MPC for end-to-end planning and control,” inPro- ceedings of the 32nd International Conference on Neural Information Processing Systems, ser. NIPS’18. Red Hook, NY , USA: Curran Associates Inc., 2018, p. 8299–8310
2018
-
[14]
Differentiable model predictive control on the GPU,
E. Adabag, M. Greiff, J. Subosits, and T. Lew, “Differentiable model predictive control on the GPU,”preprint arXiv:2510.06179, 2025
-
[15]
F1tenth: An open-source evaluation environment for continuous control and reinforcement learning,
M. O’Kelly, H. Zheng, D. Karthik, and R. Mangharam, “F1tenth: An open-source evaluation environment for continuous control and reinforcement learning,”Proceedings of Machine Learning Research, vol. 123, 2020
2020
-
[16]
Learning-based model predictive control with moving horizon state estimation for autonomous racing,
Y . Kebbati, A. Rauh, N. Ait-Oufroukh, D. Ichalal, and V . Vigneron, “Learning-based model predictive control with moving horizon state estimation for autonomous racing,”International Journal of Control, vol. 98, no. 7, pp. 1542–1552, 2025
2025
-
[17]
Beck,First-order methods in optimization
A. Beck,First-order methods in optimization. SIAM, 2017
2017
-
[18]
M. Blondel and V . Roulet, “The elements of differentiable program- ming,”arXiv preprint arXiv:2403.14606, 2024
-
[19]
Differentiable nonlinear model predictive control,
J. Frey, K. Baumg ˜A¯Irtner, G. Frison, D. Reinhardt, J. Hoffmann, L. Fichtner, S. Gros, and M. Diehl, “Differentiable nonlinear model predictive control,”arXiv preprint arXiv:2505.01353, 2025
-
[20]
Differentiable-by-design nonlinear optimization for model predictive control,
R. Zuliani, E. C. Balta, and J. Lygeros, “Differentiable-by-design nonlinear optimization for model predictive control,”arXiv preprint arXiv:2509.12692, 2025
-
[21]
Efficient and modular implicit differentiation,
M. Blondel, Q. Berthet, M. Cuturi, R. Frostig, S. Hoyer, F. Llinares- L´opez, F. Pedregosa, and J.-P. Vert, “Efficient and modular implicit differentiation,”Advances in neural information processing systems, vol. 35, pp. 5230–5242, 2022
2022
-
[22]
CARLA: An open urban driving simulator,
A. Dosovitskiy, G. Ros, F. Codevilla, A. Lopez, and V . Koltun, “CARLA: An open urban driving simulator,” inConference on robot learning. PMLR, 2017, pp. 1–16
2017
-
[23]
Physics-informed data-driven modeling of HV AC systems: A systematic analysis,
N. T. Nguyen, B. Nguyen, and T. X. Nghiem, “Physics-informed data-driven modeling of HV AC systems: A systematic analysis,”IEEE Access, vol. 14, pp. 6481–6500, 2026
2026
-
[24]
Structure- and Stability-Preserving Learning of Port-Hamiltonian Systems
B. Nguyen, N. T. Nguyen, and T. X. Nghiem, “Structure-and stability- preserving learning of port-hamiltonian systems,”arXiv preprint arXiv:2604.13297, 2026
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[25]
Xgboost: A scalable tree boosting system,
T. Chen and C. Guestrin, “Xgboost: A scalable tree boosting system,” inProceedings of the 22nd ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, ser. KDD ’16. New York, NY , USA: Association for Computing Machinery, 2016, p. 785–794
2016
-
[26]
CasADi: a software framework for nonlinear optimization and opti- mal control,
J. A. Andersson, J. Gillis, G. Horn, J. B. Rawlings, and M. Diehl, “CasADi: a software framework for nonlinear optimization and opti- mal control,”Mathematical Programming Computation, vol. 11, no. 1, pp. 1–36, 2019
2019
-
[27]
On the implementation of an interior- point filter line-search algorithm for large-scale nonlinear program- ming,
A. W ¨achter and L. T. Biegler, “On the implementation of an interior- point filter line-search algorithm for large-scale nonlinear program- ming,”Mathematical programming, vol. 106, no. 1, pp. 25–57, 2006
2006
-
[28]
FORCES NLP: an efficient implementation of interior-point methods for multistage nonlinear nonconvex programs,
A. Zanelli, A. Domahidi, J. Jerez, and M. Morari, “FORCES NLP: an efficient implementation of interior-point methods for multistage nonlinear nonconvex programs,”International Journal of Control, vol. 93, no. 1, pp. 13–29, 2020
2020
-
[29]
Knitro: An integrated pack- age for nonlinear optimization,
R. H. Byrd, J. Nocedal, and R. A. Waltz, “Knitro: An integrated pack- age for nonlinear optimization,” inLarge-scale nonlinear optimization. Springer, 2006, pp. 35–59
2006
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.