CART: Context-Aware Terrain Adaptation using Temporal Sequence Selection for Legged Robots
Pith reviewed 2026-05-10 12:47 UTC · model grok-4.3
The pith
CART combines vision and proprioception with temporal sequences to enable stable walking on complex terrain for legged robots.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
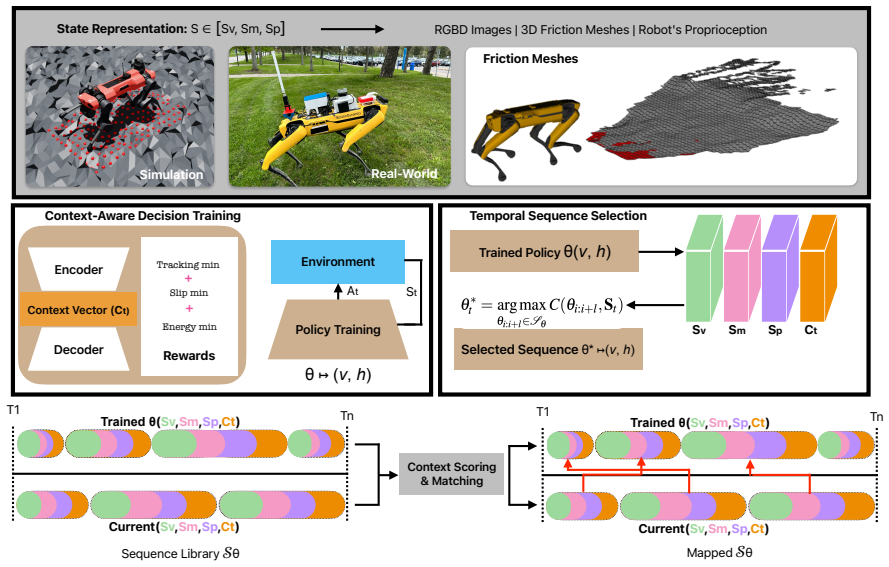
CART is a high-level controller that integrates proprioception and exteroception from onboard sensing to achieve a robust understanding of terrain by using context-aware adaptation with temporal sequence selection. This method addresses the Visual-Texture Paradox, where visual cues do not match actual terrain feel, resulting in improved stability on complex terrains.
What carries the argument
Temporal sequence selection, which processes sequences of multimodal sensor data to build contextual terrain properties for adaptation.
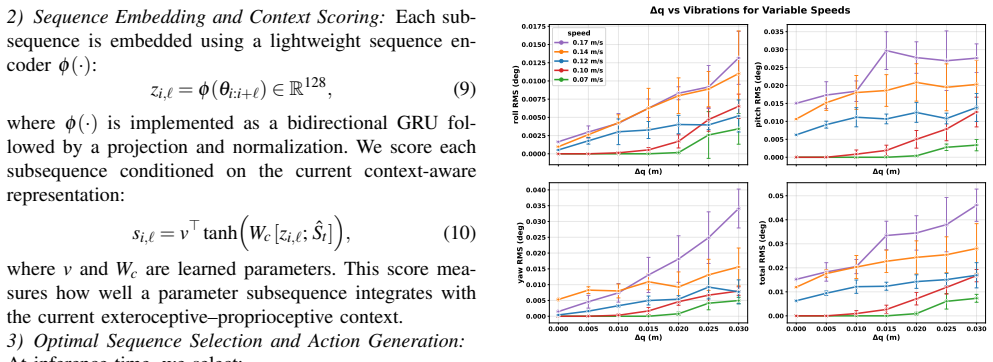
If this is right
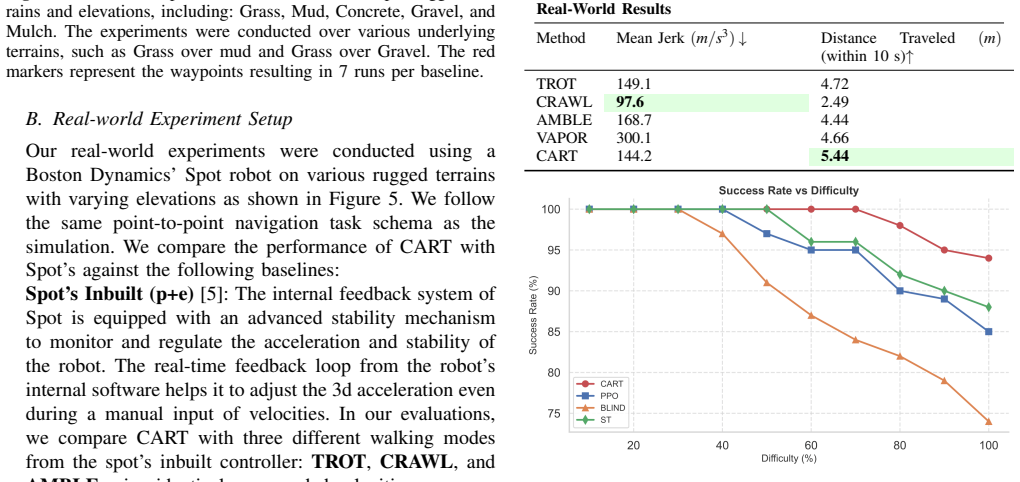
- Average success rate in simulation increases by 5 percent compared to multimodal baselines.
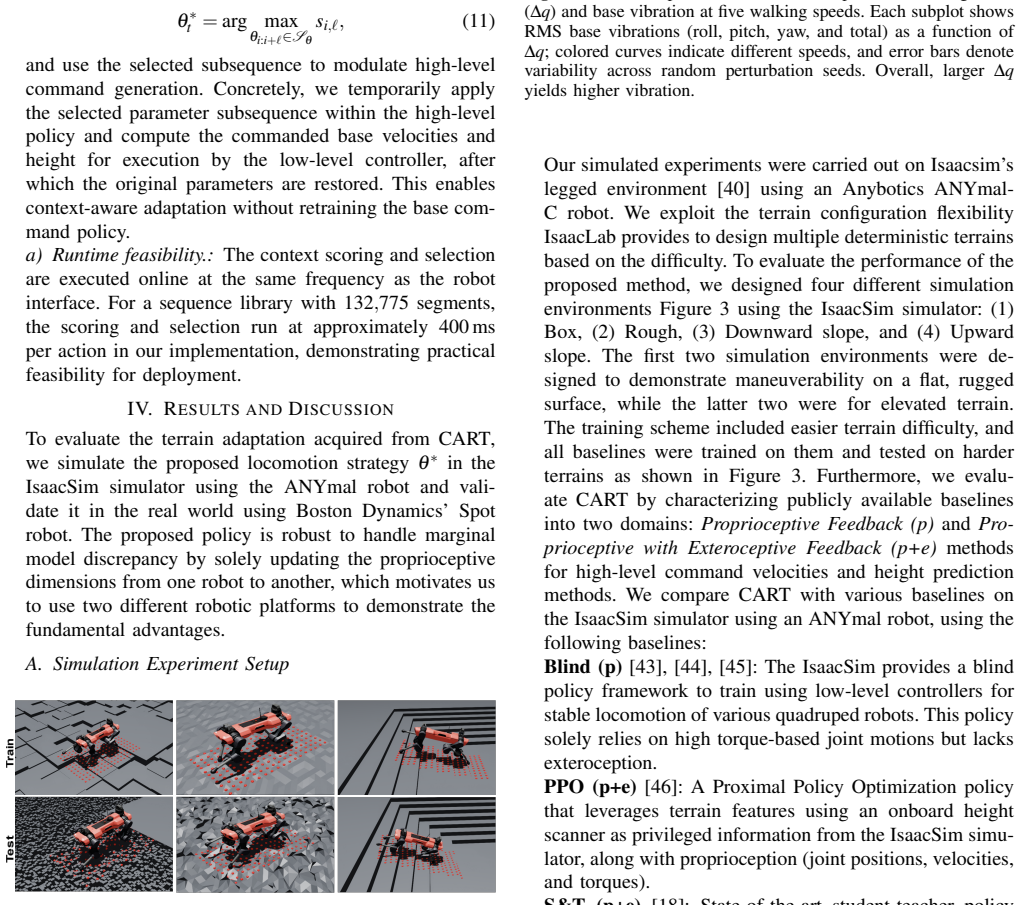
- Stability improves by up to 45 percent in one real-world setting and 24 percent in another.
- Task completion time remains unchanged despite the added adaptation.
- The method applies to multiple legged robot hardware platforms.
Where Pith is reading between the lines
- Extending the temporal window or adding more sensor types could further enhance terrain understanding in dynamic environments.
- This temporal approach may help bridge gaps in purely end-to-end learning methods that lack explicit context modeling.
- Applying similar sequence selection to other robot tasks like manipulation could improve performance in varied conditions.
- Validating the vibrational stability metric against direct measures of energy efficiency or failure modes would strengthen the evaluation.
Load-bearing premise
Vibrational stability measured at the robot base accurately reflects the quality of terrain understanding and that the temporal selection process generalizes without overfitting to tested conditions.
What would settle it
A test where CART is evaluated on a new set of terrains with different properties from those used in training and evaluation, checking if the stability and success improvements hold or if performance drops to baseline levels.
Figures


read the original abstract
Animals in nature combine multiple modalities, such as sight and feel, to perceive terrain and develop an understanding of how to walk on uneven terrain in an efficient manner. Similarly, legged robots need to develop their ability to stably walk on complex terrains by developing an understanding of the relationship between vision and proprioception. Most current terrain-adaptation methods remain susceptible to failure on complex off-road terrain because they do not explicitly model the context between exteroceptive terrain appearance and proprioceptive physical interaction. This experience-based learning often creates a Visual-Texture Paradox between what has been seen and how it actually feels. In this work, we introduce CART, a high-level controller built on a context-aware terrain adaptation approach that integrates proprioception and exteroception from onboard sensing to achieve a robust understanding of terrain. We evaluate our method on multiple terrains using the Unitree Go2 and ANYmal-C robot on the IsaacSim simulator and a Boston Dynamics SPOT robot for our real-world experiments. To evaluate whether the learned context improves locomotion behavior under the various paradox circumstances, we measure the robot s stability, traversal success, and task completion time in both simulation and real-world experiments. We compare CART against state-of-the-art locomotion and terrain- adaptation baselines across diverse terrain conditions. CART improves the average success rate by 5% over the baselines in simulation, while improving context-conditioned locomotion behavior, including up to 41% lower base oscillation in simulation and 22% in the real world, without increasing the time required to complete the locomotion tasks.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces CART, a high-level controller for legged robots that performs context-aware terrain adaptation by integrating proprioceptive and exteroceptive (vision) inputs through temporal sequence selection. This is intended to overcome the visual-texture paradox and enable stable locomotion on complex off-road terrains. The method is evaluated on an ANYmal-C robot in IsaacSim simulation and a Boston Dynamics SPOT robot in real-world experiments across multiple terrains. CART is compared against state-of-the-art multimodal baselines and claims an average 5% success-rate improvement in simulation plus stability gains of up to 45% and 24% in the real world, without increasing task completion time. Vibrational stability measured at the robot base is used as the primary metric for assessing the quality of the learned contextual terrain properties.
Significance. If the central empirical claims are substantiated with rigorous controls, CART would represent a practical advance in multimodal terrain adaptation for legged locomotion, directly addressing a known failure mode of vision-only methods. The temporal-sequence approach to fusing modalities is a plausible mechanism for building robust context, and the absence of increased traversal time is a positive practical result. However, the significance is currently limited by the reliance on a single, potentially confounded stability metric whose correlation with actual terrain understanding and generalization remains unverified.
major comments (3)
- [Abstract and §4] Abstract and §4 (Evaluation): The central claim that temporal sequence selection produces a robust multimodal terrain understanding rests on vibrational stability at the robot base as the evaluation metric. This metric is vulnerable to confounding by controller tuning, leg compliance, and sensor noise, and may not capture failure modes such as foot slippage or inefficient gaits on unseen terrains; no correlation analysis or ablation against alternative metrics (e.g., foot-force variance, energy consumption, or slip detection) is provided to establish that the reported 5%/45%/24% gains reflect improved contextual understanding rather than incidental controller effects.
- [§3 and §4] §3 (Method) and §4: The description of the temporal sequence selection mechanism does not include an analysis of its sensitivity to sequence length, sampling rate, or terrain-specific overfitting. Without cross-terrain generalization tests or hold-out terrain results that isolate the contribution of the selection module, it is unclear whether the observed improvements generalize beyond the specific test set or simply reflect better tuning on the evaluated surfaces.
- [§4] §4: The abstract states quantitative improvements but the experimental section supplies insufficient detail on the number of trials per terrain, statistical tests used, baseline implementation fidelity (e.g., whether baselines received identical hyper-parameter tuning), and data exclusion criteria. These omissions prevent independent verification of the 5% success-rate and stability figures and undermine the strength of the comparative claims.
minor comments (2)
- [Abstract] The term 'exteroception' is used without an explicit definition or reference in the abstract; a brief clarification in the introduction would improve accessibility for readers outside the immediate subfield.
- [§4] Figure captions and axis labels in the experimental results should explicitly state the number of runs and error bars (standard deviation or confidence intervals) to allow immediate assessment of variability.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback. We address each major comment below, providing clarifications and committing to revisions that strengthen the evaluation and reporting without altering the core contributions.
read point-by-point responses
-
Referee: [Abstract and §4] Abstract and §4 (Evaluation): The central claim that temporal sequence selection produces a robust multimodal terrain understanding rests on vibrational stability at the robot base as the evaluation metric. This metric is vulnerable to confounding by controller tuning, leg compliance, and sensor noise, and may not capture failure modes such as foot slippage or inefficient gaits on unseen terrains; no correlation analysis or ablation against alternative metrics (e.g., foot-force variance, energy consumption, or slip detection) is provided to establish that the reported 5%/45%/24% gains reflect improved contextual understanding rather than incidental controller effects.
Authors: We appreciate the concern about potential confounding in the vibrational stability metric. All compared methods used the identical low-level controller, robot platform, and sensor suite, which controls for tuning and compliance differences. The metric was selected as it directly measures the outcome of terrain adaptation (base smoothness during locomotion). We acknowledge that it does not explicitly quantify every failure mode. In revision we will add a limited correlation analysis using available logged data to compare vibrational stability against foot-force variance and energy consumption on representative terrains, plus a short discussion of limitations with respect to slip and sensor noise. revision: partial
-
Referee: [§3 and §4] §3 (Method) and §4: The description of the temporal sequence selection mechanism does not include an analysis of its sensitivity to sequence length, sampling rate, or terrain-specific overfitting. Without cross-terrain generalization tests or hold-out terrain results that isolate the contribution of the selection module, it is unclear whether the observed improvements generalize beyond the specific test set or simply reflect better tuning on the evaluated surfaces.
Authors: We agree that explicit sensitivity and isolation analyses would improve clarity. Sequence length was chosen via preliminary tuning for real-time feasibility; we will add a new paragraph in §4 reporting performance across a range of lengths and sampling rates on the existing terrain set. Our evaluation already spans multiple distinct simulation and real-world terrains with consistent outperformance. To isolate the selection module we will include an ablation replacing it with fixed-length or random selection, showing its specific contribution. These additions will be based on re-analysis of existing runs where possible. revision: yes
-
Referee: [§4] §4: The abstract states quantitative improvements but the experimental section supplies insufficient detail on the number of trials per terrain, statistical tests used, baseline implementation fidelity (e.g., whether baselines received identical hyper-parameter tuning), and data exclusion criteria. These omissions prevent independent verification of the 5% success-rate and stability figures and undermine the strength of the comparative claims.
Authors: We regret the insufficient experimental detail. In the revised §4 we will report the precise number of trials executed per terrain and method, the statistical tests applied (including p-values), confirmation that baselines were re-implemented from their original papers with identical hyper-parameter search procedures where applicable, and the exact data exclusion rules (e.g., safety aborts counted as failures). These additions will be textual and tabular and will not require new experiments. revision: yes
Circularity Check
No circularity: empirical method with direct experimental validation
full rationale
The paper presents CART as a context-aware controller that integrates proprioception and exteroception via temporal sequence selection, evaluated through direct comparisons of success rate and vibrational stability against multimodal baselines in simulation (IsaacSim) and real-world (ANYmal-C, SPOT) experiments. No equations, derivations, fitted parameters renamed as predictions, or self-citation chains appear in the abstract or described claims. The vibrational stability metric is introduced as an evaluation choice without reduction to prior fits or self-definitions. All load-bearing claims rest on reported empirical deltas (5% sim success, 45%/24% real stability) rather than any construction that equates outputs to inputs by definition.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Legged robots benefit from combining vision and proprioception for terrain adaptation on complex surfaces
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.