Leaderless Collective Motion in Affine Formation Control over the Complex Plane
Pith reviewed 2026-05-10 19:32 UTC · model grok-4.3
The pith
Modifying the Laplacian weights allows leaderless swarms to perform any affine transformation of a reference shape in the plane.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
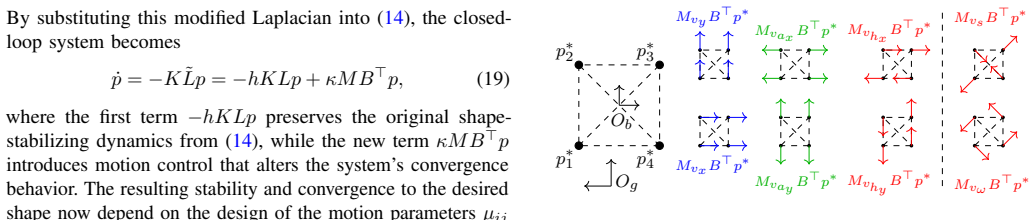
By modifying the weights of the Laplacian matrix, the collective motion of the agents is characterized as a time-varying affine transformation of a reference shape, with the motion governed by an analytic solution that explicitly designs the eigenvectors and eigenvalues of the new Laplacian. Unlike leader-follower strategies, this leaderless scheme allows agents to maintain distinct and possibly time-varying velocities, enabling all linear combinations of translations, rotations, scaling, and shearing.
What carries the argument
The modified Laplacian matrix whose eigenvectors and eigenvalues are explicitly designed via weight changes to realize any desired affine motion while preserving stability, represented in the complex plane.
If this is right
- Agents can maintain distinct and time-varying velocities while staying in formation.
- All linear combinations of translation, rotation, scaling, and shearing become possible.
- The motion admits a closed-form analytic solution determined by the modified weights.
- Complex-number representation makes 2D analysis and controller design more direct.
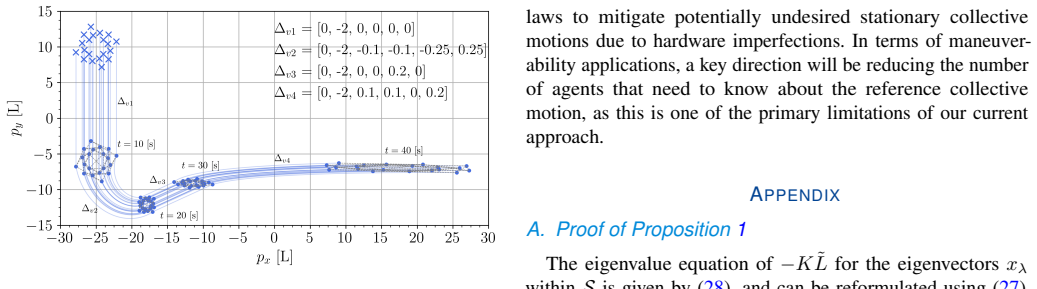
- The results hold in simulations for swarms of up to 20 agents.
Where Pith is reading between the lines
- The complex-plane approach suggests a route to similar leaderless control in 3D by replacing complex numbers with vectors or quaternions.
- Online recomputation of the weights could allow the reference shape itself to change during motion.
- The method may increase resilience when individual agents drop out, since no single leader is required.
Load-bearing premise
That weights can be chosen for any communication graph so the modified Laplacian has exactly the eigenvectors and eigenvalues needed for a target affine motion without losing formation stability.
What would settle it
An experiment or simulation in which agents using the designed weights produce trajectories that deviate from the predicted time-varying affine transformation of the reference shape.
Figures

read the original abstract
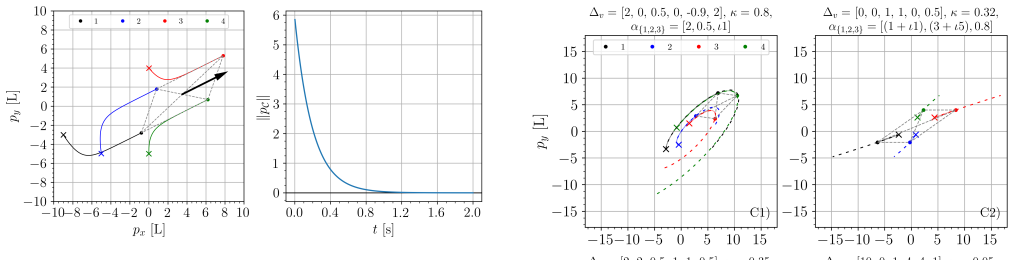
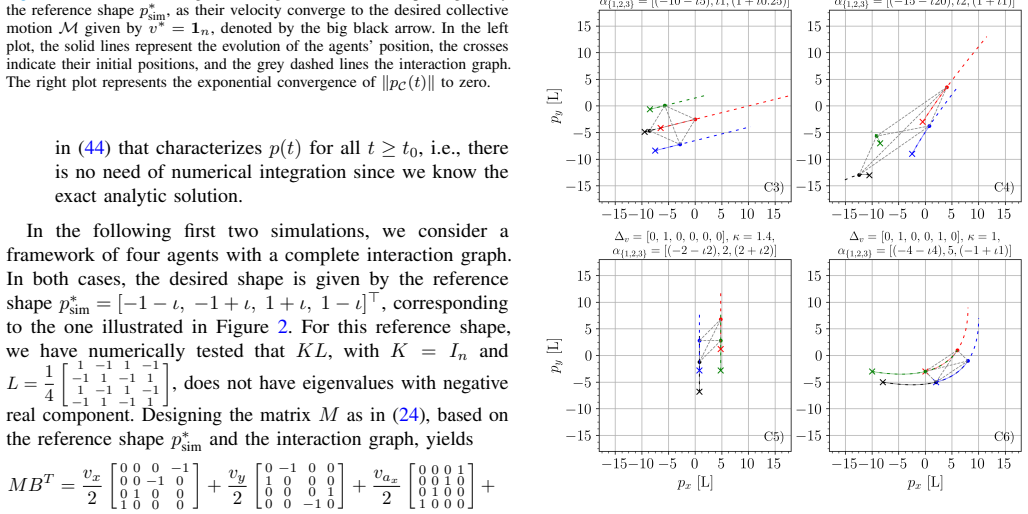
We propose a method for the collective maneuvering of affine formations in the plane by modifying the original weights of the Laplacian matrix used to achieve static formations of robot swarms. Specifically, the resulting collective motion is characterized as a time-varying affine transformation of a reference configuration, or shape. Unlike the traditional leader-follower strategy, our leaderless scheme allows agents to maintain distinct and possibly time-varying velocities, enabling a broader range of collective motions, including all the linear combinations of translations, rotations, scaling and shearing of a reference shape. Our analysis provides the analytic solution governing the resulting collective motion, explicitly designing the eigenvectors and eigenvalues that define this motion as a function of the modified weights in the new Laplacian matrix. To facilitate a more tractable analysis and design of affine formations in 2D, we propose the use of complex numbers to represent all relevant information. Simulations with up to 20 agents validate the theoretical results.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a leaderless method for collective affine formation control of robot swarms in the plane. By modifying the weights of the graph Laplacian (represented in the complex plane), the agents' trajectories are shown to realize any time-varying affine transformation (linear combinations of translation, rotation, scaling, and shearing) of a reference shape. The analysis supplies an explicit analytic solution by constructing the eigenvectors and eigenvalues of the modified Laplacian, and the results are illustrated with simulations of up to 20 agents.
Significance. If the weight-modification construction and stability guarantees hold for arbitrary graphs, the work would enable a substantially broader class of leaderless coordinated motions than existing rigid-formation or leader-follower schemes, while retaining asymptotic shape preservation. The complex-plane formulation and closed-form trajectory expression could simplify both analysis and controller synthesis in 2-D multi-robot systems.
major comments (2)
- [Abstract and main analytic derivation] The central claim requires that, for an arbitrary graph, modified (possibly complex) weights can always be chosen so the Laplacian simultaneously realizes any prescribed affine motion via its eigenvectors/eigenvalues and satisfies the stability conditions (simple zero eigenvalue with all-ones kernel vector and remaining eigenvalues having negative real parts). No constructive algorithm, existence conditions, or design procedure for obtaining such weights is supplied; the analytic solution is expressed in terms of the weights but does not close the loop on how to select them.
- [Simulation results] Simulations with 20 agents are presented as validation, yet no quantitative metrics (e.g., formation-error convergence rates, deviation from the predicted affine trajectory, or robustness under disturbances) are reported, leaving the empirical support for the general claims limited.
minor comments (2)
- [Preliminaries] The transition from real-valued 2-D positions to complex representations is introduced without an explicit isomorphism or coordinate-mapping lemma; adding this would improve readability for readers unfamiliar with complex-plane formation control.
- [Notation] Notation for the modified weights and the resulting Laplacian is introduced in the abstract but would benefit from a compact table or definition box early in the text.
Simulated Author's Rebuttal
We thank the referee for the constructive comments, which help clarify the scope and presentation of our results. We address each major comment below.
read point-by-point responses
-
Referee: [Abstract and main analytic derivation] The central claim requires that, for an arbitrary graph, modified (possibly complex) weights can always be chosen so the Laplacian simultaneously realizes any prescribed affine motion via its eigenvectors/eigenvalues and satisfies the stability conditions (simple zero eigenvalue with all-ones kernel vector and remaining eigenvalues having negative real parts). No constructive algorithm, existence conditions, or design procedure for obtaining such weights is supplied; the analytic solution is expressed in terms of the weights but does not close the loop on how to select them.
Authors: The manuscript derives an analytic expression for the agents' trajectories by explicitly constructing the eigenvectors and eigenvalues of the modified Laplacian in terms of the (complex) weights, using the complex-plane formulation to facilitate the analysis of affine transformations. This provides a closed-form solution for the collective motion once the weights are chosen. However, we agree that the current version does not provide a constructive procedure or existence conditions for selecting the weights to realize an arbitrary prescribed affine motion while maintaining the required stability properties for any given graph. In the revised manuscript, we will add a dedicated section outlining the conditions on the graph (e.g., connectivity requirements) and a design algorithm to compute the necessary weight modifications. This will address the gap and make the method more complete for practical application. revision: yes
-
Referee: [Simulation results] Simulations with 20 agents are presented as validation, yet no quantitative metrics (e.g., formation-error convergence rates, deviation from the predicted affine trajectory, or robustness under disturbances) are reported, leaving the empirical support for the general claims limited.
Authors: We acknowledge that the simulation results in the current manuscript are primarily qualitative, illustrating the theoretical predictions with up to 20 agents but without accompanying quantitative metrics. To strengthen the empirical support, we will revise the simulation section to include quantitative evaluations, such as plots and tables reporting the formation error convergence rates (e.g., the L2 norm of the shape deviation over time), the deviation from the analytically predicted affine trajectory, and additional simulations demonstrating robustness to disturbances like sensor noise or external forces. These metrics will provide a more rigorous validation of the general claims. revision: yes
Circularity Check
No significant circularity detected; derivation is self-contained design and analysis
full rationale
The paper describes a method of modifying Laplacian weights to produce collective motion as a time-varying affine transformation, with an explicit analytic solution obtained by designing the eigenvectors and eigenvalues of the modified Laplacian. This is presented as a constructive procedure rather than a reduction of the claimed result to its own inputs by definition. No load-bearing self-citations, fitted parameters renamed as predictions, or uniqueness theorems imported from prior author work are visible in the abstract or description. The central claim follows from the dynamics under the designed weights without tautological equivalence, making the derivation self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
free parameters (1)
- modified Laplacian weights
axioms (2)
- domain assumption The communication graph is undirected and connected, allowing a well-defined Laplacian matrix whose null space corresponds to the formation shape.
- standard math Complex numbers can represent 2D positions and velocities without loss of generality for planar motions.
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.