Abs-Smooth Frank-Wolfe Method: Primal-Dual Analysis, Heavy Ball Momentum, and Inexact Oracles
Pith reviewed 2026-05-20 04:03 UTC · model grok-4.3
The pith
A unified framework for Abs-Smooth Frank-Wolfe methods guarantees convergence for convex objectives under abs-smoothness via primal-dual analysis without classical smoothness.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The authors develop a unified framework for Abs-Smooth Frank-Wolfe methods that uses a clean primal-dual analysis to guarantee convergence for convex objectives satisfying abs-smoothness. This analysis does not require the classical smoothness assumptions typically needed for Frank-Wolfe methods. The framework naturally incorporates heavy ball momentum and remains robust under inexact minimization oracles. Additionally, the convexity assumption can be relaxed to apply only to the piecewise linear approximations of the objective function.
What carries the argument
The abs-smoothness structural property combined with a primal-dual analysis that drives convergence guarantees for the Frank-Wolfe iterates.
If this is right
- Convergence holds for convex objectives that satisfy abs-smoothness even when they are not classically smooth.
- Heavy ball momentum integrates directly into the method while retaining the same convergence guarantees.
- Inexact solutions to the linear minimization subproblem do not invalidate the overall convergence results.
- Convexity is required only on the piecewise linear approximations of the objective rather than on the full function.
Where Pith is reading between the lines
- The framework may extend to loss functions in deep learning models that exhibit piecewise smooth behavior at activation boundaries.
- Combining the momentum variant with other acceleration schemes such as Nesterov momentum could yield faster practical rates.
- Numerical tests on concrete machine learning tasks with known abs-smooth objectives would quantify the practical speedup over standard Frank-Wolfe.
Load-bearing premise
The objective functions must satisfy the abs-smoothness structural property that enables the primal-dual analysis to proceed without classical smoothness.
What would settle it
Apply the method to a convex function known to lack the abs-smoothness property and check whether the observed convergence rate matches the paper's predicted bound or breaks down entirely.
Figures

read the original abstract
We study projection-free optimization for convex objectives that satisfy abs-smoothness, a structural property that captures many non-smooth yet piecewise smooth functions arising, e.g., in modern machine learning models. We develop a unified framework for Abs-Smooth Frank-Wolfe methods, establishing a clean primal-dual analysis that guarantees convergence without requiring classical smoothness assumptions. Our framework extends the available results in two important directions. First, we introduce a heavy ball momentum variant and show that momentum can be incorporated naturally under abs-smoothness while preserving convergence guarantees. Second, we analyze inexact minimization oracles, demonstrating robustness to approximate inner solutions. Moreover, we relax the full convexity assumption and study the case where convexity holds only for the piecewise linear approximations of the objective, further broadening the applicability of conditional gradient methods to a wider class of non-smooth problems.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript develops a unified framework for projection-free optimization of convex objectives satisfying an abs-smoothness structural property. It provides a primal-dual analysis establishing convergence rates without classical smoothness assumptions, introduces a heavy-ball momentum variant that preserves the guarantees, analyzes robustness under inexact inner minimization oracles, and relaxes full convexity to hold only on the piecewise-linear approximations of the objective.
Significance. If the central claims hold, the work meaningfully extends conditional gradient methods to a practically relevant class of non-smooth yet piecewise-smooth objectives that appear in modern machine learning. The clean primal-dual treatment, together with the momentum and inexact-oracle extensions, supplies both theoretical unification and algorithmic flexibility; the convexity relaxation further widens applicability without sacrificing the projection-free character of the method.
major comments (2)
- [§3.2, Theorem 3.1] §3.2, Theorem 3.1: The primal-dual convergence bound is stated to depend only on the abs-smoothness modulus and the diameter of the feasible set, yet the proof sketch invokes a specific choice of step-size sequence that appears to require an a-priori estimate of that modulus; without an explicit adaptive or backtracking procedure, the result is not fully parameter-free as claimed.
- [§5, Theorem 5.3] §5, Theorem 5.3: The inexact-oracle analysis accumulates the per-iteration error linearly in the number of outer iterations; for the stated sublinear rate to survive, the inner tolerance must decrease faster than 1/k, but the manuscript only assumes a fixed tolerance. This gap affects the practical robustness claim.
minor comments (3)
- [§2] The definition of abs-smoothness (Definition 2.1) is clear, but the relation to existing notions such as semi-smoothness or piecewise smoothness would benefit from a short comparative paragraph.
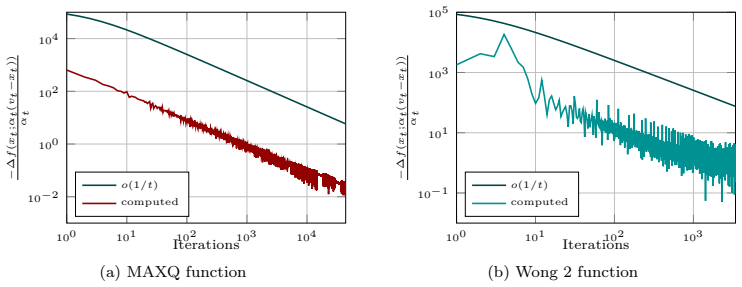
- [Figure 2] Figure 2 caption refers to 'convergence curves' but the y-axis label is missing; please add it for readability.
- [§3] Notation for the dual variable in the primal-dual analysis occasionally switches between λ and μ; consistent use throughout §3 would improve clarity.
Simulated Author's Rebuttal
We thank the referee for their careful review and valuable comments on our manuscript. We address each of the major comments below, providing clarifications and indicating the planned revisions to strengthen the paper.
read point-by-point responses
-
Referee: [§3.2, Theorem 3.1] §3.2, Theorem 3.1: The primal-dual convergence bound is stated to depend only on the abs-smoothness modulus and the diameter of the feasible set, yet the proof sketch invokes a specific choice of step-size sequence that appears to require an a-priori estimate of that modulus; without an explicit adaptive or backtracking procedure, the result is not fully parameter-free as claimed.
Authors: We appreciate the referee's observation regarding the step-size selection in the proof of Theorem 3.1. The analysis does rely on a step-size sequence that incorporates the abs-smoothness modulus L, such as η_k = 2/(L(k + 2)). This is consistent with standard analyses in optimization where the step-size depends on the smoothness parameter. The convergence rate is expressed in terms of L and the diameter, but the algorithm requires knowledge of L for the exact rate. We did not claim the method is completely parameter-free without any knowledge of L; rather, the bound avoids dependence on other constants. To address this, we will revise the manuscript to explicitly note the dependence on L in the step-size choice and include a discussion on estimating L adaptively if it is unknown, for example via a line search or doubling procedure. This will be added in Section 3.2. revision: partial
-
Referee: [§5, Theorem 5.3] §5, Theorem 5.3: The inexact-oracle analysis accumulates the per-iteration error linearly in the number of outer iterations; for the stated sublinear rate to survive, the inner tolerance must decrease faster than 1/k, but the manuscript only assumes a fixed tolerance. This gap affects the practical robustness claim.
Authors: Thank you for highlighting this important point in the inexact oracle analysis. Indeed, with a fixed inner tolerance ε, the error term accumulates as O(K ε), which would dominate the O(1/K) rate unless ε is chosen to decrease with K. The manuscript's Theorem 5.3 assumes a fixed tolerance and derives a bound that includes this accumulation, leading to convergence to a ball of radius proportional to ε rather than the exact rate. We will revise the statement of Theorem 5.3 to clarify this distinction: with fixed tolerance, we obtain approximate convergence, while to recover the precise sublinear rate, the tolerance should satisfy ε_k = O(1/k^2). We will update the discussion in Section 5 to emphasize the practical implications and the conditions for robustness, thereby strengthening the claims. revision: yes
Circularity Check
No significant circularity detected
full rationale
The paper introduces abs-smoothness as an explicit structural property for a class of piecewise-smooth convex objectives and then derives convergence guarantees for Frank-Wolfe variants (including momentum and inexact oracles) directly from that property via primal-dual analysis. No equation or step reduces by construction to a fitted parameter, self-defined quantity, or prior self-citation whose validity is presupposed; the central claims rest on the stated abs-smoothness assumption and standard oracle models rather than on any renaming or internal re-derivation of the inputs themselves. The derivation chain is therefore self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Objective functions satisfy abs-smoothness, a structural property capturing non-smooth yet piecewise smooth functions.
- domain assumption Convexity holds at least for the piecewise linear approximations of the objective.
Reference graph
Works this paper leans on
-
[1]
A. Bagirov, N. Karmitsa, and M. Mäkelä.Introduction to nonsmooth optimization. Theory, practice and software.Springer, 2014
work page 2014
-
[2]
Combinatorial Scientific Computing
A. Walther and A. Griewank. “Combinatorial Scientific Computing”. In: Chapman-Hall CRC Compu- tational Science, 2012. Chap. Getting Started with ADOL-C, pp. 181–202. 19
work page 2012
-
[3]
Improved Algorithms and Novel Applications of the FrankWolfe.jl Library
M. Besançon et al. “Improved Algorithms and Novel Applications of the FrankWolfe.jl Library”. In: ACM Transactions on Mathematical Software51.4 (2025), pp. 1–33
work page 2025
-
[4]
Julia: A fresh approach to numerical computing
J. Bezanson et al. “Julia: A fresh approach to numerical computing”. In:SIAM Review59.1 (2017), pp. 65–98
work page 2017
-
[5]
The Iterates of the Frank–Wolfe Algorithm May Not Converge
J. Bolte, C. W. Combettes, and E. Pauwels. “The Iterates of the Frank–Wolfe Algorithm May Not Converge”. In:Mathematics of Operations Research(2023)
work page 2023
-
[6]
Braun et al.Conditional Gradient Methods
G. Braun et al.Conditional Gradient Methods. 2025
work page 2025
-
[7]
An interior proximal gradient method for nonconvex optimization
A. De Marchi and A. Themelis. “An interior proximal gradient method for nonconvex optimization”. In:Open Journal of Mathematical Optimization5 (2024), pp. 1–22. [8]Diabetes(scikit-learn) Dataset (OpenML ID 44223).https://www.openml.org/d/44223. OpenML dataset accessed Jan 2025. Open Machine Learning, 2025
work page 2024
-
[8]
The Approximate Duality Gap Technique: A Unified Theory of First-Order Methods
J. Diakonikolas and L. Orecchia. “The Approximate Duality Gap Technique: A Unified Theory of First-Order Methods”. In:SIAM Journal on Optimization29.1 (2019), pp. 660–689
work page 2019
-
[9]
B. Efron et al. “Least Angle Regression”. In:The Annals of Statistics32.2 (2004), pp. 407–499
work page 2004
-
[10]
An algorithm for quadratic programming
M. Frank and P. Wolfe. “An algorithm for quadratic programming”. In:Naval Research Logistics Quarterly3.1-2 (1956), pp. 95–110
work page 1956
-
[11]
Faster projection-free convex optimization over the spectrahedron
D. Garber. “Faster projection-free convex optimization over the spectrahedron”. In:Advances in Neural Information Processing Systems29 (2016)
work page 2016
-
[12]
Z. Ghaderi and H. Khotanlou. “Weakly supervised pairwise Frank–Wolfe algorithm to recognize a sequence of human actions in RGB-D videos”. In:Signal, Image and Video Processing13 (2019), pp. 1619–1627
work page 2019
-
[13]
On stable piecewise linearization and generalized algorithmic differentiation
A. Griewank. “On stable piecewise linearization and generalized algorithmic differentiation”. In:Opti- mization Methods and Software28.6 (2013), pp. 1139–1178
work page 2013
-
[14]
Finite convergence of an active signature method to local minima of piecewise linear functions
A. Griewank and A. Walther. “Finite convergence of an active signature method to local minima of piecewise linear functions”. In:Optimization Methods and Software(2018), pp. 1–21
work page 2018
-
[15]
Polyhedral DC decomposition and DCA optimization of piecewise linear functions
A. Griewank and A. Walther. “Polyhedral DC decomposition and DCA optimization of piecewise linear functions”. In:Algorithms13.7 (2020), p. 166
work page 2020
-
[16]
Revisiting Frank-Wolfe: Projection-free sparse convex optimization
M. Jaggi. “Revisiting Frank-Wolfe: Projection-free sparse convex optimization”. In:International Con- ference on Machine Learning. PMLR. 2013, pp. 427–435
work page 2013
-
[17]
Proximity Control in Bundle Methods for Convex Nondifferentiable Minimization
K. C. Kiwiel. “Proximity Control in Bundle Methods for Convex Nondifferentiable Minimization”. In: Mathematical Programming69 (1995), pp. 217–233
work page 1995
-
[18]
On a Frank-Wolfe Approach for Abs-smooth Functions
T. Kreimeier et al. “On a Frank-Wolfe Approach for Abs-smooth Functions”. In:Optimization Methods and Software(2023)
work page 2023
-
[19]
On the global linear convergence of Frank-Wolfe optimization vari- ants
S. Lacoste-Julien and M. Jaggi. “On the global linear convergence of Frank-Wolfe optimization vari- ants”. In:Proceedings of the 29th International Conference on Neural Information Processing Systems - Volume 1. NIPS’15. Montreal, Canada: MIT Press, 2015, pp. 496–504
work page 2015
-
[20]
D.-H. Lee and Y. Nie. “Accelerating Strategies and Computational Studies of the Frank–Wolfe Algo- rithm for the Traffic Assignment Problem”. In:Transportation Research Record1771.1 (2001), pp. 97– 105
work page 2001
-
[21]
Constrained minimization methods
E. Levitin and B. Polyak. “Constrained minimization methods”. In:USSR Computational Mathematics and Mathematical Physics6.5 (1966), pp. 1–50
work page 1966
-
[22]
B. Li, A. Sadeghi, and G. B. Giannakis.Heavy Ball Momentum for Conditional Gradient. 2021
work page 2021
-
[23]
Splitting Algorithms for the Sum of Two Nonlinear Operators
P. L. Lions and B. Mercier. “Splitting Algorithms for the Sum of Two Nonlinear Operators”. In:SIAM Journal on Numerical Analysis16.6 (1979), pp. 964–979
work page 1979
-
[24]
Interpretable Neural Networks with Frank-Wolfe: Sparse Relevance Maps and Relevance Orderings
J. Macdonald, M. E. Besançon, and S. Pokutta. “Interpretable Neural Networks with Frank-Wolfe: Sparse Relevance Maps and Relevance Orderings”. In:Proceedings of the 39th International Conference on Machine Learning. Ed. by K. Chaudhuri et al. Vol. 162. Proceedings of Machine Learning Research. PMLR, 2022, pp. 14699–14716. 20
work page 2022
-
[25]
D. Martínez-Rubio and S. Pokutta.Beyond Short Steps in Frank-Wolfe Algorithms. 2025
work page 2025
-
[26]
P. Mogensen and A. Riseth.Optim.jl – A Mathematical Optimization Package for Julia.https:// github.com/JuliaNLSolvers/Optim.jl. Version v1.6.0. 2020
work page 2020
-
[27]
A simplex method for function minimization
J. A. Nelder and R. Mead. “A simplex method for function minimization”. In:The Computer Journal 7.4 (1965), pp. 308–313
work page 1965
-
[28]
Nesterov.Introductory Lectures on Convex Optimization: A Basic Course
Y. Nesterov.Introductory Lectures on Convex Optimization: A Basic Course. Kluwer Academic Pub- lishers, 2004
work page 2004
-
[29]
Nesterov.Smooth Minimization of Non-Smooth Functions
Y. Nesterov.Smooth Minimization of Non-Smooth Functions. Vol. 103. 2005, pp. 127–152
work page 2005
-
[30]
Complexity bounds for primal-dual methods minimizing the model of objective function
Y. Nesterov. “Complexity bounds for primal-dual methods minimizing the model of objective function”. In: 171.1–2 (2018), pp. 311–330
work page 2018
-
[31]
Scholtes.Introduction to Piecewise Differentiable Functions
S. Scholtes.Introduction to Piecewise Differentiable Functions. Springer, 2012
work page 2012
-
[32]
N. Z. Shor.Minimization Methods for Non-Differentiable Functions. Springer, 1985
work page 1985
-
[33]
On the nonsmooth regularity condition LIKQ for different abs-normal rep- resentations
G. Shyshkanova et al. “On the nonsmooth regularity condition LIKQ for different abs-normal rep- resentations”. In:Mathematical Optimization for Machine Learning (Proceedings of MATH+ TES) (2023)
work page 2023
-
[34]
AnAD-enabledFrank–WolfeMethodforNon-smoothOptimization
S.Tadinadaetal.“AnAD-enabledFrank–WolfeMethodforNon-smoothOptimization”.In:Proceedings of the 2024 International Conference on Algorithmic Differentiation, SIAM(2026), pp. 90–106
work page 2024
-
[35]
Pairwise Conditional Gradients without Swap Steps and Sparser Kernel Herding
K. K. Tsuji, K. Tanaka, and S. Pokutta. “Pairwise Conditional Gradients without Swap Steps and Sparser Kernel Herding”. In:Proceedings of the 39th International Conference on Machine Learn- ing. Ed. by K. Chaudhuri et al. Vol. 162. Proceedings of Machine Learning Research. PMLR, 2022, pp. 21864–21883
work page 2022
-
[36]
Stochastic block coordinate Frank-Wolfe algorithm for large-scale biological network alignment
Y. Wang and X. Qian. “Stochastic block coordinate Frank-Wolfe algorithm for large-scale biological network alignment”. In:EURASIP Journal on Bioinformatics and Systems Biology2016.9 (2016)
work page 2016
-
[37]
Conditional Gradient Algorithms for Non-Smooth Convex Optimiza- tion
V. N. Z. Harchaoui A. Juditsky. “Conditional Gradient Algorithms for Non-Smooth Convex Optimiza- tion”. In:Mathematical Programming152 (2015), pp. 75–112. 21
work page 2015
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.