Human adaptive variability stabilises collective traffic dynamics
Pith reviewed 2026-06-26 02:49 UTC · model grok-4.3
The pith
Human drivers' speed-dependent headway adjustments generate nonlinear damping that stabilizes traffic flow unlike rigid automated control.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
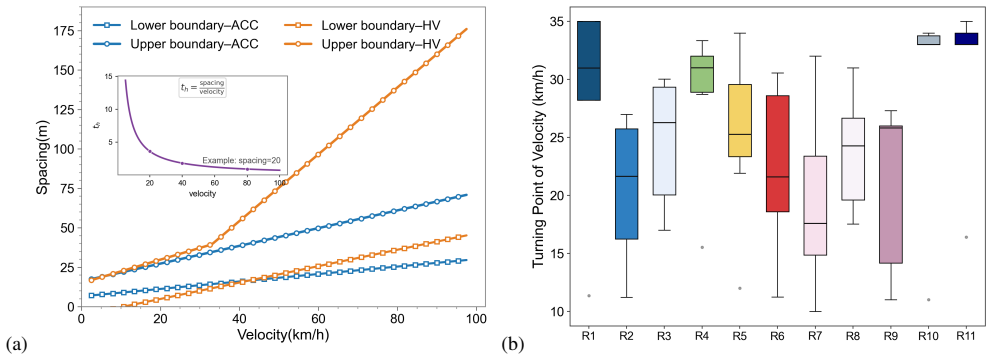
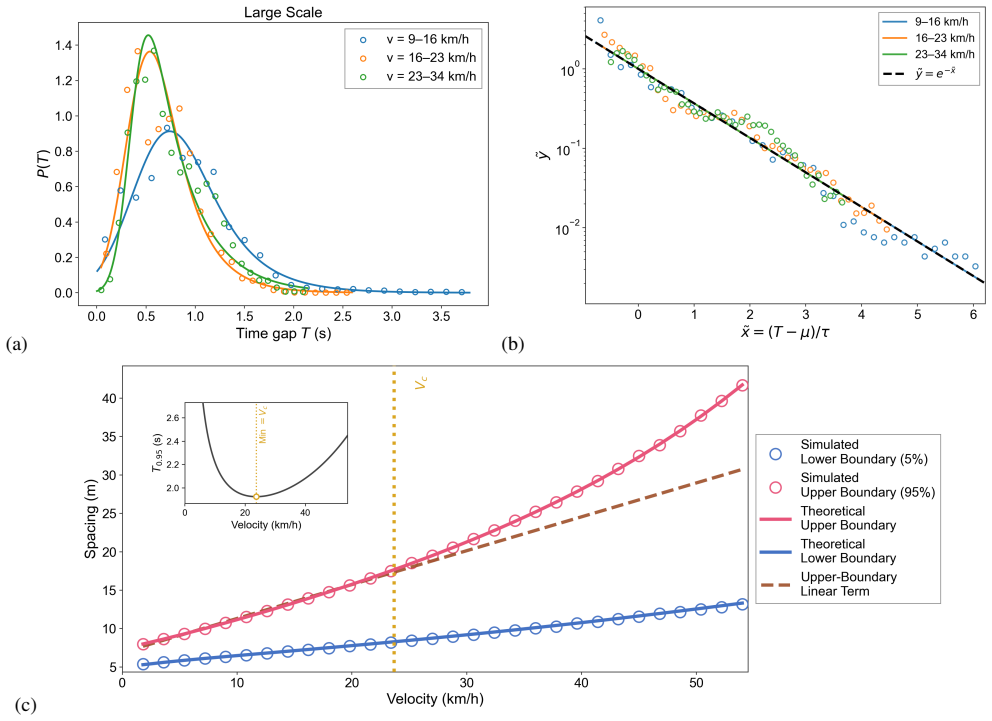
Human car-following does not follow a fixed proportional spacing rule. Drivers continuously reshape their time-headway distributions across speed regimes, exhibiting a non-monotonic shift from efficiency-oriented to risk-sensitive regulation. This speed-dependent variability generates nonlinear damping that suppresses the synchronisation and propagation of local errors, in contrast to rigid algorithmic controllers that amplify small perturbations into severe stop-and-go waves.
What carries the argument
Speed-dependent non-monotonic reshaping of time-headway distributions that generates nonlinear damping of traffic disturbances.
If this is right
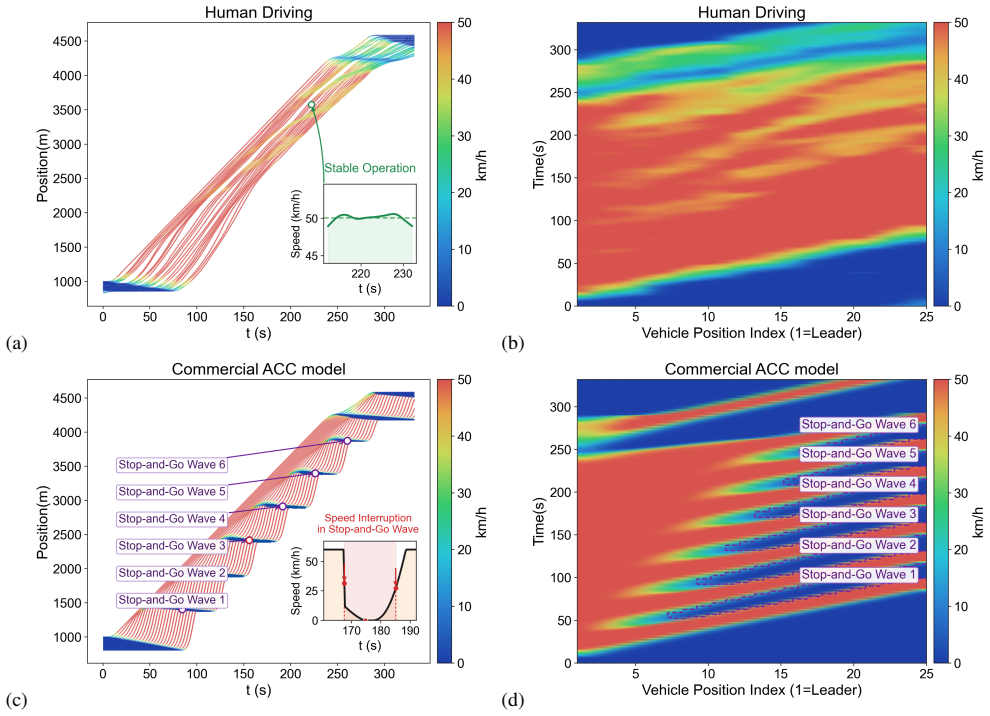
- Commercial rule-based ACC controllers amplify local perturbations into stop-and-go waves.
- Human-driven platoons progressively dissipate disturbances and maintain smoother flow.
- Production ACC systems increase fuel consumption and carbon emissions by 2.7- to 5.0-fold compared to human driving.
- Robust interactive systems benefit from embedding adaptive behavioral flexibility instead of rigid uniformity.
Where Pith is reading between the lines
- Similar adaptive variability could stabilize other large-scale AI systems involving human-AI interaction.
- Traffic models that assume fixed rules may underestimate stability from behavioral shifts.
- Future experiments could test mixed fleets of human and automated vehicles to observe interaction dynamics.
Load-bearing premise
The controlled experiments and calibrated simulations accurately attribute the dissipation of disturbances specifically to the non-monotonic time-headway variability rather than other unmeasured factors.
What would settle it
An experiment where drivers are forced to maintain fixed time-headways across speeds and then checking whether their platoons show amplified waves similar to those in ACC simulations.
Figures

read the original abstract
Automated systems are often designed on the assumption that replacing human behavioural variability with precise, uniform algorithmic control improves collective performance. In automotive traffic, this principle underlies commercial adaptive cruise control (ACC). Using two large-scale human-driving experiments comprising 2.95 million car-following observations, a 25-vehicle platoon experiment and a controlled 11-driver protocol, cross-validated with 0.77 million observations from the NGSIM dataset and data from 22 production ACC systems, together with empirically calibrated ACC simulations, we show the opposite: rigid algorithmic uniformity creates systemic fragility. Commercial rule-based controllers amplify small local perturbations into severe stop-and-go waves, increasing fuel consumption and carbon emissions by approximately 2.7- to 5.0-fold across scenarios. Human-driven platoons, by contrast, progressively dissipate disturbances and maintain smoother flow. We identify the behavioural mechanism behind this advantage: human car-following does not follow a fixed proportional spacing rule. Drivers continuously reshape their time-headway distributions across speed regimes, exhibiting a non-monotonic shift from efficiency-oriented to risk-sensitive regulation. This speed-dependent variability generates nonlinear damping that suppresses the synchronisation and propagation of local errors. Our findings challenge the view that human variability is merely suboptimal noise to be eliminated. More broadly, they suggest that robust large-scale interactive AI systems should embed adaptive, human-inspired behavioural flexibility rather than rely on rigid uniformity.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims that human drivers adaptively reshape time-headway distributions in a non-monotonic, speed-dependent manner, generating nonlinear damping that dissipates local perturbations and stabilizes collective traffic flow. In contrast, commercial ACC systems with rigid control amplify disturbances into stop-and-go waves. This is supported by 2.95 million car-following observations from two human-driving experiments (including a 25-vehicle platoon and 11-driver protocol), cross-validated against 0.77 million NGSIM observations and 22 production ACC systems, plus empirically calibrated ACC simulations.
Significance. If the central causal attribution holds, the result challenges the design premise of many automated driving systems and has implications for modeling interactive AI systems more broadly. Strengths include the large observation counts, NGSIM cross-validation, and use of production ACC data for comparison. The work provides empirical evidence against the assumption that eliminating behavioral variability improves collective performance.
major comments (2)
- [Abstract and experimental design (25-vehicle platoon, 11-driver protocol)] The central claim attributes disturbance dissipation specifically to the non-monotonic shift in time-headway distributions. However, the 25-vehicle platoon and controlled 11-driver protocols (described in the abstract and experimental sections) do not include an explicit counterfactual comparison holding other factors fixed while varying only the time-headway distribution; without this, the isolation from confounders such as attention, anticipation, or vehicle dynamics remains untested.
- [ACC simulation calibration and comparison sections] The empirically calibrated ACC simulations are used to contrast with human behavior, yet the calibration parameters (listed among free parameters) are not shown to avoid inadvertently reproducing the very adaptive variability under test; this affects the strength of the claim that rigid uniformity creates fragility.
minor comments (2)
- [Abstract] The abstract provides no details on statistical controls, data exclusion criteria, or potential selection effects in the platoon experiments, which would strengthen the presentation of the large observation counts.
- [Behavioral mechanism description] Notation for time-headway distributions and the precise definition of the non-monotonic shift should be clarified with an equation or figure reference to aid reproducibility.
Simulated Author's Rebuttal
We thank the referee for the constructive comments on our manuscript. We address each major comment below with clarifications on our design and planned revisions.
read point-by-point responses
-
Referee: [Abstract and experimental design (25-vehicle platoon, 11-driver protocol)] The central claim attributes disturbance dissipation specifically to the non-monotonic shift in time-headway distributions. However, the 25-vehicle platoon and controlled 11-driver protocols (described in the abstract and experimental sections) do not include an explicit counterfactual comparison holding other factors fixed while varying only the time-headway distribution; without this, the isolation from confounders such as attention, anticipation, or vehicle dynamics remains untested.
Authors: We acknowledge that the experiments do not provide an explicit counterfactual isolating only the time-headway distribution. The 25-vehicle platoon and 11-driver protocol instead compare collective outcomes under human driving (with observed adaptive variability) against production ACC systems and calibrated simulations under matched conditions. Cross-validation with 0.77 million NGSIM observations further supports consistency of the non-monotonic pattern. We will add an explicit limitations paragraph discussing potential remaining confounders such as anticipation and attention in the revised manuscript. revision: partial
-
Referee: [ACC simulation calibration and comparison sections] The empirically calibrated ACC simulations are used to contrast with human behavior, yet the calibration parameters (listed among free parameters) are not shown to avoid inadvertently reproducing the very adaptive variability under test; this affects the strength of the claim that rigid uniformity creates fragility.
Authors: We will include the complete calibration parameter values, objective function, and fitting procedure in the supplementary information of the revised manuscript. These parameters are fixed and non-adaptive by construction, drawn from production ACC data without embedding speed-dependent time-headway reshaping. revision: yes
Circularity Check
No circularity; claims rest on direct experiments and simulations
full rationale
The paper advances its claims through two large-scale human-driving experiments (2.95 million observations), a 25-vehicle platoon test, an 11-driver controlled protocol, NGSIM cross-validation (0.77 million observations), data from 22 production ACC systems, and empirically calibrated ACC simulations. No derivation chain, equation, or self-citation reduces the reported stabilization effect or the non-monotonic time-headway mechanism to a fitted input or prior result by construction. The analysis is therefore self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
free parameters (1)
- ACC simulation calibration parameters
axioms (1)
- domain assumption The observed differences between human and ACC behavior are attributable to time-headway variability rather than confounding factors in the experimental setups.
Reference graph
Works this paper leans on
-
[1]
Traffic and related self-driven many-particle systems.Rev
Helbing, D. Traffic and related self-driven many-particle systems.Rev. Mod. Phys.73, 1067–1141, DOI: 10.1103/ RevModPhys.73.1067 (2001)
2001
-
[2]
Shladover, S. E. Connected and automated vehicle sys- tems: Introduction and overview.J. Intell. Transp. Syst. 22, 190–200, DOI: 10.1080/15472450.2017.1336053 (2018)
-
[3]
K., Chien, C
Swaroop, D., Hedrick, J. K., Chien, C. C. & Ioannou, P. A comparison of spacing and headway control laws for automatically controlled vehicles.Veh. Syst. Dyn.23, 597–625 (1994)
1994
-
[4]
& Rajagopal, K
Darbha, S. & Rajagopal, K. R. Intelligent cruise con- trol systems and traffic flow stability.Transp. Res. Part C: Emerg. Technol.7, 329–352, DOI: 10.1016/ S0968-090X(99)00024-8 (1999)
1999
-
[5]
Wilson, R. E. & Ward, J. A. Car-following models: fifty years of linear stability analysis - a mathemati- cal perspective.Transp. Plan. Technol.34, 3–18, DOI: 10.1080/03081060.2011.530826 (2011)
-
[6]
Phys.10, 033001, DOI: 10.1088/1367-2630/10/3/033001 (2008)
Sugiyama, Y .et al.Traffic jams without bottle- necks—experimental evidence for the physical mecha- nism of the formation of a jam.New J. Phys.10, 033001, DOI: 10.1088/1367-2630/10/3/033001 (2008)
-
[7]
Simon, H. A. The architecture of complexity.Proc. Am. Philos. Soc.106, 467–482 (1962)
1962
-
[8]
E.Diversity and Complexity(Princeton Univer- sity Press, Princeton, NJ, 2010)
Page, S. E.Diversity and Complexity(Princeton Univer- sity Press, Princeton, NJ, 2010)
2010
-
[9]
Anderson, P. W. More is different.Science177, 393–396, DOI: 10.1126/science.177.4047.393 (1972)
-
[10]
Zhang, Y ., Ocampo-Espindola, J. L., Kiss, I. Z. & Mot- ter, A. E. Random heterogeneity outperforms design in network synchronization.Proc. Natl. Acad. Sci.118, e2024299118, DOI: 10.1073/pnas.2024299118 (2021)
-
[11]
& Page, S
Hong, L. & Page, S. E. Groups of diverse problem solvers can outperform groups of high-ability problem solvers. Proc. Natl. Acad. Sci.101, 16385–16389, DOI: 10.1073/ pnas.0403723101 (2004)
2004
-
[12]
A.et al.The importance of cognitive diversity for sustaining the commons.Nat
Baggio, J. A.et al.The importance of cognitive diversity for sustaining the commons.Nat. Commun.10, 875, DOI: 10.1038/s41467-019-08549-8 (2019)
-
[13]
P., Liu, Y .-Y
Meng, Y ., Cornelius, S. P., Liu, Y .-Y . & Li, A. Dy- namics of collective cooperation under personalised strat- egy updates.Nat. Commun.15, 3125, DOI: 10.1038/ s41467-024-47380-8 (2024)
2024
-
[14]
Gunter, G.et al.Are commercially implemented adaptive cruise control systems string stable?IEEE Transactions on Intell. Transp. Syst.22, 6992–7003, DOI: 10.1109/ TITS.2020.3000682 (2021)
arXiv 2020
-
[15]
Makridis, M.et al.Empirical study on the properties of adaptive cruise control systems and their impact on traffic flow and string stability.Transp. Res. Rec.2674, 471–484, DOI: 10.1177/0361198120911047 (2020)
-
[16]
Ye, Y ., Sun, J. & Sun, J. Car-following characteristics of commercially available adaptive cruise control systems and comparison with human drivers.Transp. Res. Rec. 2677, 1401–1414, DOI: 10.1177/03611981221113313 (2023). 12/14
-
[17]
Makridis, M., Mattas, K., Anesiadou, A. & Ciuffo, B. Openacc: An open database of car-following experiments to study the properties of commercial acc systems.Transp. Res. Part C: Emerg. Technol.125, 103047, DOI: 10.1016/ j.trc.2021.103047 (2021)
arXiv 2021
-
[18]
Ciuffo, B.et al.Requiem on the positive effects of com- mercial adaptive cruise control on motorway traffic and recommendations for future automated driving systems. Transp. Res. Part C: Emerg. Technol.130, 103305, DOI: 10.1016/j.trc.2021.103305 (2021)
-
[19]
E.et al.Dissipation of stop-and-go waves via control of autonomous vehicles: Field experiments
Stern, R. E.et al.Dissipation of stop-and-go waves via control of autonomous vehicles: Field experiments. Transp. Res. Part C: Emerg. Technol.89, 205–221, DOI: 10.1016/j.trc.2018.02.005 (2018)
-
[20]
Shi, X. & Li, X. Empirical study on car-following charac- teristics of commercial automated vehicles with different headway settings.Transp. Res. Part C: Emerg. Technol. 128, 103134, DOI: 10.1016/j.trc.2021.103134 (2021)
-
[21]
Tang, S., Zou, Y ., Wu, S., Xie, Y . & Zhang, Y . Comparing car-following behavior patterns of human-driven vehicles and autonomous vehicles in a mixed traffic environment. IEEE Transactions on Intell. Transp. Syst.26, 6814–6830, DOI: 10.1109/TITS.2025.3539757 (2025)
-
[22]
Papadoulis, A., Quddus, M. & Imprialou, M. Evaluating the safety impact of connected and autonomous vehicles on motorways.Accid. Analysis & Prev.124, 12–22, DOI: 10.1016/j.aap.2018.12.019 (2019)
-
[23]
& Ding, S
Abdel-Aty, M. & Ding, S. A matched case-control analysis of autonomous vs human-driven vehicle ac- cidents.Nat. Commun.15, 4931, DOI: 10.1038/ s41467-024-48526-4 (2024)
2024
-
[24]
Jiang, R.et al.Traffic experiment reveals the nature of car-following.PLOS ONE9, e94351, DOI: 10.1371/ journal.pone.0094351 (2014)
2014
-
[25]
Jiang, R.et al.On some experimental features of car- following behavior and how to model them.Transp. Res. Part B: Methodol.80, 338–354, DOI: 10.1016/j.trb.2015. 08.003 (2015)
-
[26]
Mason, W. & Watts, D. J. Collaborative learning in networks.Proc. Natl. Acad. Sci.109, 764–769, DOI: 10.1073/pnas.1110069108 (2012)
-
[27]
Rahwan, I.et al.Machine behaviour.Nature568, 477– 486, DOI: 10.1038/s41586-019-1138-y (2019)
-
[28]
Karpas, E. D., Shklarsh, A. & Schneidman, E. Informa- tion socialtaxis and efficient collective behavior emerging in groups of information-seeking agents.Proc. Natl. Acad. Sci.114, 5589–5594, DOI: 10.1073/pnas.1618055114 (2017). 29.Koopman, P. & Wagner, M. Autonomous vehicle safety: An interdisciplinary challenge.IEEE Intell. Transp. Syst. Mag.9, 90–96, D...
-
[29]
Rezaei, A. & Caulfield, B. Safety of autonomous vehicles: What are the insights from experienced industry profes- sionals?Transp. Res. Part F: Traffic Psychol. Behav.81, 472–489, DOI: 10.1016/j.trf.2021.07.005 (2021)
-
[30]
Ibanez-Guzman, J. & Li, Y . Lidar and cameras in au- tonomous driving.Nat. Rev. Electr. Eng.1–2, DOI: 10.1038/s44287-025-00176-4 (2025)
-
[31]
He, Y ., Montanino, M., Mattas, K., Punzo, V . & Ciuffo, B. Physics-augmented models to simulate commercial adaptive cruise control (acc) systems.Transp. Res. Part C: Emerg. Technol.139, 103692, DOI: 10.1016/j.trc.2022. 103692 (2022)
-
[32]
Cascetta, E., Cartenì, A. & Di Francesco, L. Do au- tonomous vehicles drive like humans? a turing ap- proach and an application to sae automation level 2 cars. Transp. Res. Part C: Emerg. Technol.134, 103499, DOI: 10.1016/j.trc.2021.103499 (2022)
-
[33]
Gunter, G., Janssen, C., Barbour, W., Stern, R. E. & Work, D. B. Model-based string stability of adaptive cruise control systems using field data.IEEE Transactions on Intell. Veh.5, 90–99, DOI: 10.1109/TIV .2019.2955368 (2020)
work page doi:10.1109/tiv 2019
-
[34]
Tian, J.et al.On the role of speed adaptation and spac- ing indifference in traffic instability: Evidence from car- following experiments and its stochastic model.Transp. Res. Part B: Methodol.129, 334–350, DOI: 10.1016/j.trb. 2019.09.014 (2019)
-
[35]
Li, T., Chen, D., Zhou, H., Laval, J. & Xie, Y . Car- following behavior characteristics of adaptive cruise con- trol vehicles based on empirical experiments.Transp. Res. Part B: Methodol.147, 67–91, DOI: 10.1016/j.trb.2021. 03.003 (2021)
-
[36]
Dey, P. P. & Chandra, S. Desired time gap and time headway in steady-state car-following on two-lane roads. J. Transp. Eng.135, 687–693, DOI: 10.1061/(ASCE) 0733-947X(2009)135:10(687) (2009)
-
[37]
R.et al.Human-agent collectives.Commun
Jennings, N. R.et al.Human-agent collectives.Commun. ACM57, 80–88, DOI: 10.1145/2629559 (2014)
-
[38]
Dafoe, A.et al.Cooperative ai: machines must learn to find common ground.Nature593, 33–36, DOI: 10.1038/ d41586-021-01170-0 (2021)
2021
-
[39]
Jiang, R.et al.Experimental and empirical investiga- tions of traffic flow instability.Transp. Res. Part C: Emerg. Technol.94, 83–98, DOI: 10.1016/j.trc.2017.08. 024 (2018)
-
[40]
Jabari, S. E. & Liu, H. X. A stochastic model of traf- fic flow: Theoretical foundations.Transp. Res. Part B: Methodol.46, 156–174, DOI: 10.1016/j.trb.2011.09.006 (2012)
-
[41]
Tian, J.et al.Car following behavioral stochasticity analysis and modeling: Perspective from wave travel 13/14 time.Transp. Res. Part B-Methodological143, 160–176, DOI: 10.1016/j.trb.2020.11.008 (2021)
-
[42]
Sci.51, 807–822, DOI: 10.1287/trsc.2015.0667 (2017)
Tian, J.et al.Cellular automaton model with dynamical 2d speed-gap relation.Transp. Sci.51, 807–822, DOI: 10.1287/trsc.2015.0667 (2017)
-
[43]
& Cousineau, D
Lacouture, Y . & Cousineau, D. How to use matlab to fit the ex-gaussian and other probability functions to a distribution of response times.Tutorials Quant. Methods for Psychol.4, 35–45 (2008)
2008
-
[44]
Models of single lane time headway distri- butions.Transp
Branston, D. Models of single lane time headway distri- butions.Transp. Sci.10, 125–148, DOI: 10.1287/trsc.10. 2.125 (1976)
-
[45]
He, Y .et al.The energy impact of adaptive cruise con- trol in real-world highway multiple-car-following sce- narios.Eur. Transp. Res. Rev.12, 17, DOI: 10.1186/ s12544-020-00406-w (2020)
2020
-
[46]
Apostolakis, T., Makridis, M. A., Kouvelas, A. & Am- pountolas, K. Energy-based assessment and driving be- havior of ACC systems and humans inside platoons.IEEE Transactions on Intell. Transp. Syst.24, 12726–12735, DOI: 10.1109/TITS.2023.3285296 (2023)
-
[47]
Laval, J. A., Toth, C. S. & Zhou, Y . A parsimonious model for the formation of oscillations in car-following models.Transp. Res. Part B: Methodol.70, 228–238, DOI: 10.1016/j.trb.2014.09.004 (2014)
-
[48]
Bouadi, M., Jia, B., Jiang, R., Li, X. & Gao, Z.-Y . Stochastic factors and string stability of traffic flow: An- alytical investigation and numerical study based on car- following models.Transp. Res. Part B: Methodol.165, 96–122, DOI: 10.1016/j.trb.2022.09.007 (2022)
-
[49]
Treiber, M. & Kesting, A. The intelligent driver model with stochasticity—new insights into traffic flow oscilla- tions.Transp. Res. Part B: Methodol.117, 613–623, DOI: 10.1016/j.trb.2017.08.012 (2018)
-
[50]
Chen, D., Laval, J. A., Zheng, Z. & Ahn, S. A behav- ioral car-following model that captures traffic oscilla- tions.Transp. Res. Part B: Methodol.46, 744–761, DOI: 10.1016/j.trb.2012.01.009 (2012). Data availability The NGSIM trajectory data are publicly available from the US Federal Highway Administration (FHWA) at https: //ops.fhwa.dot.gov/trafficanalys...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.