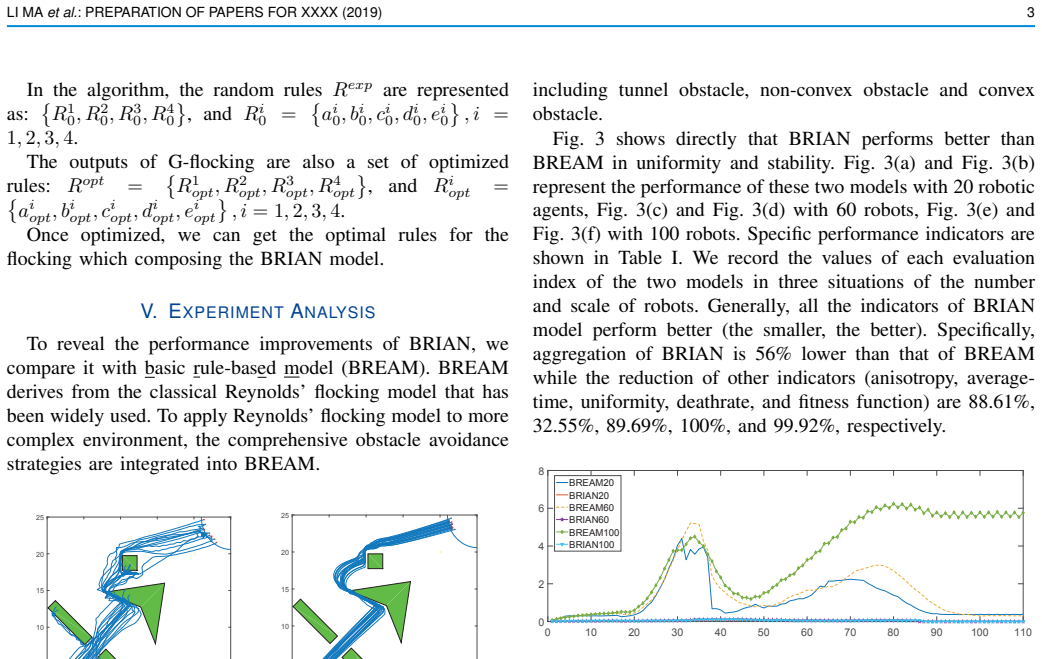
G-flocking: Flocking Model Optimization based on Genetic Framework
Pith reviewed 2026-05-24 15:09 UTC · model grok-4.3
The pith
A genetic framework optimizes flocking parameters to balance internal patterns, environment response, and target direction in robot swarms.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The G-flocking model uses a genetic framework to evolve the parameters of a standard flocking controller so that internal cohesion, external disturbance rejection, and goal orientation can be maintained together, reducing the instability that appears when these requirements conflict during autonomous navigation.
What carries the argument
The genetic framework, which iteratively selects and mutates flocking parameter sets to reduce measured conflicts among the three navigation requirements.
If this is right
- Swarm controllers can be deployed in larger groups without proportional growth in instability.
- Navigation tasks that combine obstacle avoidance and goal seeking become feasible with a single parameter set.
- The need for separate modules for cohesion, avoidance, and guidance is reduced.
- Performance metrics for stability and adaptability improve under simultaneous internal and external pressures.
Where Pith is reading between the lines
- The same genetic search might be applied to other collective behaviors such as formation control or task allocation.
- Real-world robot hardware could test whether the evolved parameters transfer from simulation without retuning.
- If the genetic process consistently finds good parameters, manual flocking design in new environments could be replaced by automated search.
Load-bearing premise
That a genetic search can locate parameter values satisfying pattern maintenance, environment response, and target orientation at the same time without introducing fresh instabilities.
What would settle it
A controlled navigation trial in which the genetically tuned swarm loses formation or fails to reach the target when obstacles appear suddenly, while an untuned swarm does not show the same degradation.
Figures



read the original abstract
Flocking model has been widely used to control robotic swarm. However, with the increasing scalability, there exist complex conflicts for robotic swarm in autonomous navigation, brought by internal pattern maintenance, external environment changes, and target area orientation, which results in poor stability and adaptability. Hence, optimizing the flocking model for robotic swarm in autonomous navigation is an important and meaningful research domain.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents G-flocking, a genetic-algorithm framework for optimizing the weights of a Reynolds-style flocking model used to control robotic swarms in autonomous navigation. The central claim is that GA tuning of the internal, external, and target-orientation parameters resolves conflicts among pattern maintenance, environmental response, and goal direction, yielding improved stability and adaptability. The approach encodes standard flocking weights as a GA chromosome, employs a multi-term fitness function that penalizes collisions, fragmentation, and target deviation, and reports simulation results in static and mildly dynamic environments that show measurable gains relative to hand-tuned baselines.
Significance. If the reported simulation improvements hold under the stated fitness function, the work supplies a reproducible empirical demonstration that a standard GA can locate parameter sets satisfying the three-way trade-off without introducing obvious new instabilities. The explicit multi-term fitness and comparison to hand-tuned baselines are strengths that support falsifiability within the simulation scope.
major comments (1)
- [§4] §4 (Fitness Function and Results): the claim that the optimized parameters simultaneously satisfy internal pattern maintenance, external response, and target orientation without new trade-offs rests on the multi-term fitness; however, no ablation or sensitivity analysis is provided on the relative weights of the penalty terms, leaving open whether the reported gains are robust or specific to the chosen weighting.
minor comments (2)
- [Abstract] Abstract: the abstract states only the motivation and domain importance; adding one sentence describing the GA encoding and the key simulation outcome would align the abstract with the manuscript's empirical content.
- [Simulation Setup] Simulation Setup: the number of agents, environment dimensions, and precise dynamic perturbation schedules are not stated with sufficient precision to allow exact replication of the reported trials.
Simulated Author's Rebuttal
We thank the referee for the constructive comment and the recommendation for minor revision. We address the point on the fitness function below and will revise the manuscript accordingly.
read point-by-point responses
-
Referee: [§4] §4 (Fitness Function and Results): the claim that the optimized parameters simultaneously satisfy internal pattern maintenance, external response, and target orientation without new trade-offs rests on the multi-term fitness; however, no ablation or sensitivity analysis is provided on the relative weights of the penalty terms, leaving open whether the reported gains are robust or specific to the chosen weighting.
Authors: We acknowledge that the manuscript lacks an ablation study or sensitivity analysis on the relative weights of the penalty terms. The multi-term fitness function was constructed to penalize collisions, fragmentation, and target deviation in order to address the three-way trade-off, and the GA-optimized parameters show measurable improvements over hand-tuned baselines in the reported static and dynamic simulations. To strengthen the robustness claim, we will add a sensitivity analysis in the revised Section 4 that varies the penalty weights and reports the resulting changes in stability and adaptability metrics. revision: yes
Circularity Check
No significant circularity; standard GA optimization with explicit fitness and external simulation benchmarks
full rationale
The paper encodes Reynolds flocking weights as GA chromosomes and defines a multi-term fitness function that directly penalizes collisions, fragmentation, and target deviation. Optimized parameters are then evaluated in separate simulation runs against hand-tuned baselines, producing measurable metric improvements. No equation reduces to its own inputs by construction, no fitted parameter is relabeled as an independent prediction, and no load-bearing claim rests on self-citation or an imported uniqueness theorem. The derivation chain is the GA search itself plus empirical testing; results are falsifiable against the stated simulation scenarios and therefore self-contained.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
R., Tadokoro, S., Nardi, D., Jacoff, A., Fiorini, P., & Choset, H., et al
Murphy, R. R., Tadokoro, S., Nardi, D., Jacoff, A., Fiorini, P., & Choset, H., et al. (2008). Search and rescue robotics. Springer Handbook of Robotics, 1151–1173
work page 2008
-
[2]
Dirafzoon, A. , & Lobaton, E. . (2014). Topological Mapping of Un- known Environments using an Unlocalized Robotic Swarm. IEEE/RSJ International Conference on Intelligent Robots & Systems . IEEE
work page 2014
-
[3]
Parker, L. E., Rus, D., & Sukhatme, G. S. (2008). Multiple Mobile Robot Systems. springer Handbook of Robotics, 921–941
work page 2008
-
[4]
Brown, D. S. , Kerman, S. C. , & Goodrich, M. A. . (2014). [acm press the 2014 acm/ieee international conference - bielefeld, germany (2014.03.03-2014.03.06)] In Proceedings of the 2014 acm/ieee interna- tional conference on human-robot interaction - hri ¨14 - human-swarm interactions based on managing attractors. 90-97
work page 2014
-
[5]
Krause, J., Hoare, D., Krause, S., Hemelrijk, C. K., & Rubenstein, D. I. (2015). Leadership in fish shoals. Fish & Fisheries , 1(1), 82-89
work page 2015
-
[6]
Nagy, Mt, kos, Zsuzsa, Biro, D. , & Vicsek, Tams. (2010). Hierarchical group dynamics in pigeon flocks. Nature, 464(7290), 890-893
work page 2010
-
[7]
Feinerman, O. , Pinkoviezky, I. , Gelblum, A. , Fonio, E. , & Gov, N. S. . (2018). The physics of cooperative transport in groups of ants. Nature Physics
work page 2018
-
[8]
J., Gabrielson, E., & Werb, Z., et al.(2013)
Cheung, K. J., Gabrielson, E., & Werb, Z., et al.(2013). Collective invasion in breast cancer requires a conserved basal epithelial program, Cell, 155(7)
work page 2013
-
[9]
Gremlins are coming: DARPA enters Phase III of its UA V programme
Talal Husseini.(2018). Gremlins are coming: DARPA enters Phase III of its UA V programme. https://www.army- technology.com/features/gremlins-darpa-uav-programme/
work page 2018
-
[10]
Raytheon gets $29m for work on US Navy LOCUST UA V prototype
(2018). Raytheon gets $29m for work on US Navy LOCUST UA V prototype. https://navaltoday.com/2018/06/28/raytheon-wins-contract- for-locus-inp/
work page 2018
-
[11]
Wang, J., & Xin, M. (2013). Flocking of multi-agent system using a unified optimal control approach. Journal of Dynamic Systems Mea- surement & Control , 135(6), 061005
work page 2013
-
[12]
Li, J. , Zhang, W. , Su, H. , & Yang, Y . . (2015). Flocking of partially- informed multi-agent systems avoiding obstacles with arbitrary shape. Autonomous Agents and Multi-Agent Systems , 29(5), 943-972
work page 2015
-
[13]
Vrohidis, C. , Vlantis, P. , Bechlioulis, C. P. , & Kyriakopoulos, K. J. . (2018). Reconfigurable multi-robot coordination with guaranteed con- vergence in obstacle cluttered environments under local communication. Autonomous Robots , 42(4), 853-873. Li Ma is currently working toward his Ph.D. de- gree in the College of Systems Engineering, Na- tional Univ...
work page 2018
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.