Learning Locomotion on Discrete Terrain via Minimal Proximity Sensing
Pith reviewed 2026-07-03 21:57 UTC · model grok-4.3
The pith
Embedding minimal proximity sensors in a quadruped's feet allows RL policies to anticipate terrain discontinuities for robust locomotion.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Embedding a minimal suite of low-cost, high-frequency infrared proximity sensors directly into the feet of a quadrupedal robot provides pre-contact feedback that, when integrated into a reinforcement learning framework, enables the robot to anticipate terrain discontinuities such as gaps and stepping stones, resulting in substantially improved traversal robustness over discrete terrain.
What carries the argument
Minimal suite of foot-embedded infrared proximity sensors providing localized pre-contact signals integrated into the RL policy.
If this is right
- Local proximity sensing substantially improves traversal robustness over discrete terrain.
- Sparse near-field sensing can be reliably modeled in simulation and transferred to the real world with high fidelity.
- It offers a low-power, low-latency alternative or complement to complex global perception suites.
- Robots can handle situations problematic for traditional perception stacks due to occlusions or state estimation drift.
Where Pith is reading between the lines
- Such sensing could be particularly useful in environments where vision is unreliable, like dusty or dark areas.
- Combining this with other sensors might create more resilient locomotion systems.
- The approach might generalize to other types of legged robots beyond quadrupeds.
Load-bearing premise
Such sparse, near-field sensing can be reliably modeled in simulation and transferred to the real world with high fidelity.
What would settle it
If the real robot with the learned policy fails to traverse the discrete terrain features at rates similar to simulation despite the sensors functioning as modeled.
Figures




read the original abstract
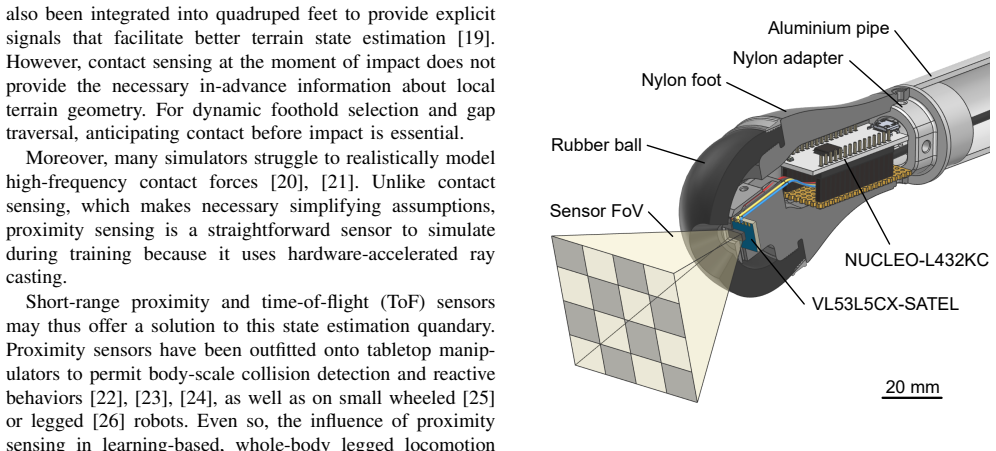
Learning-based control has revolutionized dynamic locomotion, yet navigating unstructured terrain remains limited by a robot's incomplete awareness of imminent ground contact. While global perception systems such as LiDARs and depth cameras provide environmental context, they are frequently plagued by latencies, occlusions, and the high computational cost of dense geometric reconstruction. On the other hand, proprioceptive feedback is purely reactive, initiating corrections only after impact has occurred. This work explores embedding a minimal suite of low-cost, high-frequency infrared proximity sensors directly into the feet of a quadrupedal robot. These sensors provide "pre-contact" feedback that is robust to self-occlusions and significantly less computationally demanding than conventional vision-based pipelines. By integrating these localized signals into a reinforcement learning framework, we enable the robot to anticipate terrain discontinuities such as gaps and stepping stones that are problematic for traditional perception stacks due to occlusions or state estimation drift. We demonstrate that such sparse, near-field sensing can be reliably modeled in simulation and transferred to the real world with high fidelity. Experimental results show that local proximity sensing substantially improves traversal robustness over discrete terrain and offers a low-power, low-latency alternative or complement to complex global perception suites in unpredictable environments. For more information about results and methods, please see the project website: https://sites.google.com/view/foot-tof/home.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes embedding a minimal set of foot-mounted infrared proximity sensors on a quadrupedal robot to supply pre-contact feedback. These signals are integrated into an RL policy to anticipate discrete terrain features such as gaps and stepping stones. The approach is shown to be modelable via ray-cast simulation with domain randomization over noise and placement, to transfer to hardware, and to yield higher traversal success rates than proprioception-only or vision baselines in real-world gap and stepping-stone experiments.
Significance. If the quantitative results hold, the work supplies a low-cost, low-latency, occlusion-robust sensing modality that complements or replaces global perception for locomotion on discontinuous terrain. Explicit calibration of the sensor model to hardware datasheets, domain randomization for sim-to-real transfer, and direct quantitative comparisons against baselines constitute clear strengths that support the central claim.
minor comments (2)
- [Abstract] Abstract: the claim that local proximity sensing 'substantially improves traversal robustness' is not accompanied by any numerical success rates, baseline values, or statistical measures, even though the full manuscript supplies these data.
- The manuscript references a project website for additional results and methods; providing a direct link to open-source code or simulation environments would further aid reproducibility.
Simulated Author's Rebuttal
We thank the referee for the positive assessment of the manuscript and the recommendation for minor revision. The summary accurately captures the core contribution of embedding minimal foot-mounted proximity sensors for pre-contact feedback in RL-based locomotion.
Circularity Check
No significant circularity
full rationale
The paper presents an RL-based locomotion controller augmented with foot-mounted proximity sensors. Its central claims are supported by simulation-to-real experiments with quantitative comparisons against baselines, domain randomization over sensor parameters, and ray-cast modeling calibrated to hardware specs. No equations, fitted parameters, or self-citations are described that reduce any prediction or result to an input by construction. The derivation chain is therefore self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Reinforcement learning policies can be trained effectively from sparse, localized pre-contact sensor signals without dense geometric reconstruction.
Reference graph
Works this paper leans on
-
[1]
Extreme parkour with legged robots,
X. Cheng, K. Shi, A. Agarwal, and D. Pathak, “Extreme parkour with legged robots,” in2024 IEEE International Conference on Robotics and Automation (ICRA), 2024, pp. 11 443–11 450
2024
-
[2]
ANYmal parkour: Learning agile navigation for quadrupedal robots,
D. Hoeller, N. Rudin, D. Sako, and M. Hutter, “ANYmal parkour: Learning agile navigation for quadrupedal robots,”Science Robotics, vol. 9, no. 88, p. eadi7566, Mar. 2024
2024
-
[3]
Locoman: Advancing versatile quadrupedal dexterity with lightweight loco-manipulators,
C. Lin, X. Liu, Y . Yang, Y . Niu, W. Yu, T. Zhang, J. Tan, B. Boots, and D. Zhao, “Locoman: Advancing versatile quadrupedal dexterity with lightweight loco-manipulators,” in2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024, pp. 6877– 6884
2024
-
[4]
Learning coor- dinated badminton skills for legged manipulators,
Y . Ma, A. Cramariuc, F. Farshidian, and M. Hutter, “Learning coor- dinated badminton skills for legged manipulators,”Science robotics, vol. 10, no. 102, p. eadu3922, 2025
2025
-
[5]
Continuous jumping for legged robots on stepping stones via trajectory optimization and model predictive control,
C. Nguyen, L. Bao, and Q. Nguyen, “Continuous jumping for legged robots on stepping stones via trajectory optimization and model predictive control,” in2022 IEEE 61st Conference on Decision and Control (CDC), 2022, pp. 93–99
2022
-
[6]
Robust ladder climbing with a quadrupedal robot,
D. V ogel, R. Baines, J. Church, J. Lotzer, K. Werner, and M. Hutter, “Robust ladder climbing with a quadrupedal robot,” in2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025, pp. 7239–7244
2025
-
[7]
High-speed control and navigation for quadrupedal robots on complex and discrete terrain,
H. Kim, H. Oh, J. Park, Y . Kim, D. Youm, M. Jung, M. Lee, and J. Hwangbo, “High-speed control and navigation for quadrupedal robots on complex and discrete terrain,”Science Robotics, vol. 10, no. 102, p. eads6192, 2025
2025
-
[8]
Neural scene representation for locomotion on structured terrain,
D. Hoeller, N. Rudin, C. Choy, A. Anandkumar, and M. Hutter, “Neural scene representation for locomotion on structured terrain,” IEEE Robotics and Automation Letters, vol. 7, no. 4, pp. 8667–8674, 2022
2022
-
[9]
Learning to walk in confined spaces using 3d representation,
T. Miki, J. Lee, L. Wellhausen, and M. Hutter, “Learning to walk in confined spaces using 3d representation,” in2024 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2024, pp. 8649–8656
2024
-
[10]
N. Rudin, J. He, J. Aurand, and M. Hutter, “Parkour in the wild: Learn- ing a general and extensible agile locomotion policy using multi-expert distillation and rl fine-tuning,”arXiv preprint arXiv:2505.11164, 2025
-
[11]
Iterated extended kalman filter based visual-inertial odometry using direct pho- tometric feedback,
M. Bloesch, M. Burri, S. Omari, M. Hutter, and R. Siegwart, “Iterated extended kalman filter based visual-inertial odometry using direct pho- tometric feedback,”The International Journal of Robotics Research, vol. 36, no. 10, pp. 1053–1072, 2017
2017
-
[12]
Touching a nerf: Leveraging neural radiance fields for tactile sensory data generation,
S. Zhong, A. Albini, O. P. Jones, P. Maiolino, and I. Posner, “Touching a nerf: Leveraging neural radiance fields for tactile sensory data generation,” inConference on Robot Learning. PMLR, 2023, pp. 1618–1628
2023
-
[13]
Deep tactile experience: Estimating tactile sensor output from depth sensor data,
K. Patel, S. Iba, and N. Jamali, “Deep tactile experience: Estimating tactile sensor output from depth sensor data,” in2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2020, pp. 9846–9853
2020
-
[14]
Collision detection and reaction: A contribution to safe physical human-robot interaction,
S. Haddadin, A. Albu-Schaffer, A. De Luca, and G. Hirzinger, “Collision detection and reaction: A contribution to safe physical human-robot interaction,” in2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2008, pp. 3356–3363
2008
-
[15]
State estimation for legged robots- consistent fusion of leg kinematics and imu,
M. Bloesch, M. Hutter, M. A. Hoepflinger, S. Leutenegger, C. Gehring, C. D. Remy, and R. Siegwart, “State estimation for legged robots- consistent fusion of leg kinematics and imu,”Robotics, vol. 17, pp. 17–24, 2013
2013
-
[16]
Probabilistic contact estimation and impact detection for state estimation of quadruped robots,
M. Camurri, M. Fallon, S. Bazeille, A. Radulescu, V . Barasuol, D. G. Caldwell, and C. Semini, “Probabilistic contact estimation and impact detection for state estimation of quadruped robots,”IEEE Robotics and Automation Letters, vol. 2, no. 2, pp. 1023–1030, 2017
2017
-
[17]
Perceptive locomotion through nonlinear model-predictive control,
R. Grandia, F. Jenelten, S. Yang, F. Farshidian, and M. Hutter, “Perceptive locomotion through nonlinear model-predictive control,” IEEE Transactions on Robotics, vol. 39, no. 5, pp. 3402–3421, 2023
2023
-
[18]
Learning robust perceptive locomotion for quadrupedal robots in the wild,
T. Miki, J. Lee, J. Hwangbo, L. Wellhausen, V . Koltun, and M. Hutter, “Learning robust perceptive locomotion for quadrupedal robots in the wild,”Science Robotics, vol. 7, no. 62, p. eabk2822, Jan. 2022
2022
-
[19]
An adaptive sensor foot for a bipedal and quadrupedal robot,
K. Fondahl, D. Kuehn, F. Beinersdorf, F. Bernhard, F. Grimminger, M. Schilling, T. Stark, and F. Kirchner, “An adaptive sensor foot for a bipedal and quadrupedal robot,” in2012 4th IEEE RAS & EMBS In- ternational Conference on Biomedical Robotics and Biomechatronics (BioRob), 2012, pp. 270–275
2012
-
[20]
Isaac Gym: High Performance GPU-Based Physics Simulation For Robot Learning
V . Makoviychuk, L. Wawrzyniak, Y . Guo, M. Lu, K. Storey, M. Mack- lin, D. Hoeller, N. Rudin, A. Allshire, A. Handa,et al., “Isaac gym: High performance gpu-based physics simulation for robot learning,” arXiv preprint arXiv:2108.10470, 2021
work page internal anchor Pith review Pith/arXiv arXiv 2021
-
[21]
Isaac Lab: A GPU-Accelerated Simulation Framework for Multi-Modal Robot Learning
M. Mittal, P. Roth, J. Tigue, A. Richard, O. Zhang, P. Du, A. Serrano- Munoz, X. Yao, R. Zurbr ¨ugg, N. Rudin,et al., “Isaac lab: A gpu- accelerated simulation framework for multi-modal robot learning,” arXiv preprint arXiv:2511.04831, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[22]
Proximity skin sensor using time-of-flight sensor for human collaborative robot,
S. Tsuji and T. Kohama, “Proximity skin sensor using time-of-flight sensor for human collaborative robot,”IEEE Sensors Journal, vol. 19, no. 14, pp. 5859–5864, 2019
2019
-
[23]
Estimating scene flow in robot surroundings with distributed miniaturised time-of-flight sensors,
J. Sander, G. Caroleo, A. Albini, and P. Maiolino, “Estimating scene flow in robot surroundings with distributed miniaturised time-of-flight sensors,” in2025 34th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), 2025, pp. 493–499
2025
-
[24]
Real-time obstacle avoidance using dual-type proximity sensor for safe human- robot interaction,
S. J. Moon, J. Kim, H. Yim, Y . Kim, and H. R. Choi, “Real-time obstacle avoidance using dual-type proximity sensor for safe human- robot interaction,”IEEE Robotics and Automation Letters, vol. 6, no. 4, pp. 8021–8028, 2021
2021
-
[25]
Miniature mobile robot detection using an ultralow-resolution time- of-flight sensor,
J. Pleterski, G. ˇSkulj, C. Esnault, J. Puc, R. Vrabi ˇc, and P. Podr ˇzaj, “Miniature mobile robot detection using an ultralow-resolution time- of-flight sensor,”IEEE Transactions on Instrumentation and Measure- ment, vol. 72, pp. 1–9, 2023
2023
-
[26]
Pre-landing control for a legged robot based on tiptoe proximity sensor feedback,
R. Sato, H. Arita, and A. Ming, “Pre-landing control for a legged robot based on tiptoe proximity sensor feedback,”IEEE Access, vol. 10, pp. 21 619–21 630, 2022
2022
-
[27]
Elevation mapping for locomotion and navigation using gpu,
T. Miki, L. Wellhausen, R. Grandia, F. Jenelten, T. Homberger, and M. Hutter, “Elevation mapping for locomotion and navigation using gpu,” in2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2022, pp. 2273–2280
2022
-
[28]
Marg: Mastering risky gap terrains for legged robots with elevation mapping,
Y . Dong, J. Ma, L. Zhao, W. Li, and P. Lu, “Marg: Mastering risky gap terrains for legged robots with elevation mapping,”IEEE Transactions on Robotics, vol. 41, pp. 6123–6139, 2025
2025
-
[29]
Attention-based map encoding for learning generalized legged loco- motion,
J. He, C. Zhang, F. Jenelten, R. Grandia, M. B ¨acher, and M. Hutter, “Attention-based map encoding for learning generalized legged loco- motion,”Science Robotics, vol. 10, no. 105, p. eadv3604, 2025
2025
-
[30]
Start: Traversing sparse footholds with terrain reconstruction,
R. Yu, Q. Wang, H. Li, Z. Jun, Z. Wang, J. Wu, and Q. Zhu, “Start: Traversing sparse footholds with terrain reconstruction,”IEEE Robotics and Automation Letters, vol. 11, no. 2, pp. 2194–2201, 2026
2026
-
[31]
Learning agile loco- motion on risky terrains,
C. Zhang, N. Rudin, D. Hoeller, and M. Hutter, “Learning agile loco- motion on risky terrains,” in2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2024, pp. 11 864– 11 871
2024
-
[32]
Long short-term memory,
S. Hochreiter and J. Schmidhuber, “Long short-term memory,”Neural computation, vol. 9, no. 8, pp. 1735–1780, 1997
1997
-
[33]
Proximal Policy Optimization Algorithms
J. Schulman, F. Wolski, P. Dhariwal, A. Radford, and O. Klimov, “Proximal policy optimization algorithms,”arXiv preprint arXiv:1707.06347, 2017
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[34]
C. Schwarke, M. Mittal, N. Rudin, D. Hoeller, and M. Hutter, “Rsl-rl: A learning library for robotics research,”arXiv preprint arXiv:2509.10771, 2025
-
[35]
Learning to walk in minutes using massively parallel deep reinforcement learning,
N. Rudin, D. Hoeller, P. Reist, and M. Hutter, “Learning to walk in minutes using massively parallel deep reinforcement learning,” in Conference on robot learning. PMLR, 2022, pp. 91–100
2022
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.