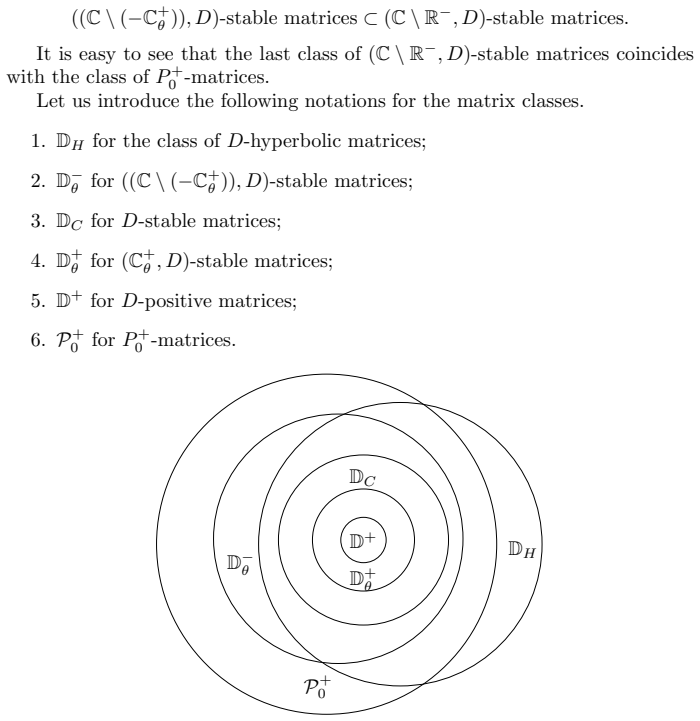
Unifying matrix stability concepts with a view to applications
Pith reviewed 2026-05-24 21:46 UTC · model grok-4.3
The pith
Various classical matrix stability concepts can be unified into one parameterized notion depending on a stability region, matrix class, and operation.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central claim is that many specific stability concepts for matrices arising in linear dynamical systems can be viewed as instances of (D, G, o)-stability, where the choice of the stability region D subset C, the matrix class G, and the binary operation o determines the particular type, allowing common properties and methods to be established uniformly across them.
What carries the argument
The (D, G, o)-stability concept, defined via a stability region D, matrix class G, and binary matrix operation o, which generalizes specific stability notions by varying these three parameters.
If this is right
- Several well-known matrix problems can be united under the same framework.
- Common methods of analysis apply across many partial cases of stability.
- Elementary properties of stable matrices hold uniformly once proved in the general setting.
- Further development of the theory follows from properties of the chosen stability region D, such as LMI regions or the unit disk.
- The framework applies to dynamical systems of different types.
Where Pith is reading between the lines
- Results proved for one choice of parameters may transfer directly to other stability concepts via the shared definition.
- The framework could encourage exploration of previously unstudied combinations of regions, classes, and operations.
- Applications in control or numerical methods might benefit from treating stability questions uniformly rather than case by case.
Load-bearing premise
That choosing a stability region D, matrix class G, and operation o is sufficient to capture the essential features and analysis methods of each specific stability concept without omitting application-critical distinctions.
What would settle it
Identifying a classical stability notion from the dynamical systems literature that cannot be expressed for any choice of D, G, and o, or finding an analysis method that applies to one specific case but has no uniform counterpart under the general definition.
Figures

read the original abstract
Multiplicative and additive $D$-stability, diagonal stability, Schur $D$-stability, $H$-stability are classical concepts which arise in studying linear dynamical systems. We unify these types of stability, as well as many others, in one concept of $({\mathfrak D}, {\mathcal G}, \circ)$-stability, which depends on a stability region ${\mathfrak D} \subset {\mathbb C}$, a matrix class ${\mathcal G}$ and a binary matrix operation $\circ$. This approach allows us to unite several well-known matrix problems and to consider common methods of their analysis. In order to collect these methods, we make a historical review, concentrating on diagonal and $D$-stability. We prove some elementary properties of $({\mathfrak D}, {\mathcal G}, \circ)$-stable matrices, uniting the facts that are common for many partial cases. Basing on the properties of a stability region $\mathfrak D$ which may be chosen to be a concrete subset of $\mathbb C$ (e.g. the unit disk) or to belong to a specified type of regions (e.g. LMI regions) we briefly describe the methods of further development of the theory of $({\mathfrak D}, {\mathcal G}, \circ)$-stability. We mention some applications of the theory of $({\mathfrak D}, {\mathcal G}, \circ)$-stability to the dynamical systems of different types.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces the parameterized concept of (𝔇, 𝒢, ∘)-stability, where 𝔇 ⊂ ℂ is a stability region, 𝒢 a matrix class, and ∘ a binary matrix operation. This single definition is shown to recover classical notions including multiplicative and additive D-stability, diagonal stability, Schur D-stability, and H-stability by suitable choice of the three parameters. The manuscript supplies a historical review focused on diagonal and D-stability, derives elementary properties that hold uniformly across instantiations, sketches analysis methods once 𝔇 is specialized (LMI regions, unit disk, etc.), and notes applications to dynamical systems of various types.
Significance. The parameterization approach preserves application-critical distinctions while exposing common analytic methods, which is a genuine organizational contribution to matrix stability theory. The uniform elementary properties and the historical synthesis are useful even if no new deep theorems are proved; the framework supplies a clean language in which to state and transfer results between previously separate stability problems.
minor comments (4)
- The definition of the binary operation ∘ (domain, associativity or other algebraic requirements) should be stated explicitly in the section that introduces (𝔇, 𝒢, ∘)-stability so that the uniform properties can be verified without ambiguity.
- At least two additional concrete recoveries (beyond the four classical notions listed in the abstract) should be written out in full, with the precise (𝔇, 𝒢, ∘) triples, to demonstrate that the unification is not merely notational.
- Notation for the stability region (fraktur 𝔇 versus script D) and for the matrix class 𝒢 should be fixed consistently throughout the text and in all displayed equations.
- The historical review would benefit from a short table or enumerated list that maps each classical stability concept to its corresponding (𝔇, 𝒢, ∘) triple; this would make the unification immediately visible to readers.
Simulated Author's Rebuttal
We thank the referee for the positive summary, significance assessment, and recommendation of minor revision. The referee's description of the manuscript is accurate.
Circularity Check
No significant circularity identified
full rationale
The paper defines (𝔇, 𝒢, ∘)-stability explicitly as a parameterized umbrella recovering classical notions (multiplicative/additive D-stability, diagonal stability, etc.) via choice of region, class, and operation. It then states and proves elementary properties that hold uniformly for any such choice, followed by specialization methods based on concrete properties of 𝔇 (e.g., LMI regions or unit disk). This is a standard definitional generalization whose content is independent of the inputs; no derivation reduces by construction to a fitted parameter, self-citation chain, or renamed known result. The framework remains self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- standard math Standard algebraic properties of matrix addition, multiplication, and eigenvalues over the complex numbers
invented entities (1)
-
(D, G, o)-stability
no independent evidence
Forward citations
Cited by 1 Pith paper
-
Universal bound on the Lyapunov spectrum of quantum master equations
New proof via Lyapunov exponents that the largest decay rate Γ_max in a d-dimensional quantum master equation satisfies Γ_max ≤ κ_d times the sum of the other d²-1 decay rates, with κ_d depending only on d and the map class.
Reference graph
Works this paper leans on
-
[1]
Abed, Strong D-stability, Systems Control Lett
E.H. Abed, Strong D-stability, Systems Control Lett. 7 (1986), 207-212
work page 1986
-
[2]
E.H. Abed, Multiparameter singular perturbation problems: Iterativ e ex- pansions and asymptotic stability, Systems Control Lett. 5 (1985), 279- 282
work page 1985
-
[3]
E.H. Abed, Decomposition and stability of multiparameter singular pe rtur- bation problems, IEEE Transactions on Automatic Control AC-31 (1986), 925-934
work page 1986
-
[4]
Abed, Singularly perturbed Hopf bifurcation, IEEE Trans
E.H. Abed, Singularly perturbed Hopf bifurcation, IEEE Trans. Circuits and Systems 32 (1985), 1270-1280
work page 1985
- [5]
- [6]
-
[7]
M. Allouche, M. Souissi, M. Chaabane, D. Mehdi, Robust D-stability anal- ysis of an induction motor, in 16th Mediterranean Conference on Control and Automation, (2008), 255-260
work page 2008
-
[8]
Altafini, Stability analysis of diagonally equipotent matrices, Automat- ica 49 (2013), 2780-2785
C. Altafini, Stability analysis of diagonally equipotent matrices, Automat- ica 49 (2013), 2780-2785
work page 2013
-
[9]
Yu.A. Al’pin, V.S. Al’pina, Combinatorial structure of k-semiprimitive matrix families, Sbornik: Mathematics 207 (2016), pp. 639–651
work page 2016
-
[10]
B. Anderson, N. Bose, E. Jury, A simple test for zeros of a complex poly- nomial in a sector, IEEE Transactions on Automatic Control 19 (1974), 437–438
work page 1974
-
[11]
M. Araki, Application of M -matrices to the stability problems of composite dynamical systems, Journal of Math. Analysis Appl. 52 (1975), 309-321
work page 1975
-
[12]
M. Arcak, Linear matrix inequality tests for synchrony of diffusively coupled nonlinear systems, Proceedings of the 58th Allerton Conference (2010), 1651–1656
work page 2010
-
[13]
M. Arcak, Diagonal stability on cactus graphs and application to netw ork stability analysis, IEEE Transactions on Automatic Control 56 (2011), 2766–2777. 86
work page 2011
-
[14]
M. Arcak, E.D. Sontag, Diagonal stability of a class of cyclic systems and its connection with the secant criterion, Automatica 42 (2006), 1531–1537
work page 2006
-
[15]
M. Arcak, E.D. Sontag, Connections between diagonal stability and the secant condition for cyclic systems, Proceedings of the 2006 American Control Conference (2006), 1493–1498
work page 2006
-
[16]
A. Arhangel’skii, M. Tkachenko, Topological groups and related structures, Atlantis Press, 2008
work page 2008
-
[17]
K.J. Arrow, M.D. Intriligator (Eds.) Handbook on mathematical eco- nomics, Vol. I, II. North-Holland, Amsterdam, 1987
work page 1987
- [18]
- [19]
- [20]
-
[21]
A. Bacciotti, L. Rosier, Liapunov functions and stability in control theory, 2nd edition, Springer-Verlag, 2005
work page 2005
-
[22]
O. Bachelier, B. Pradin, ∂D-regularity for robust matrix root clustering , IF AC Proceedings Volumes, 36 (2003), pp. 237-242
work page 2003
-
[23]
O. Bachelier, J. Bosche, D. Mehdi, On matrix root-clustering in a combi- nation of first order regions , IF AC Proceedings Volumes, 39 (2006), pp. 405-410
work page 2006
-
[24]
O. Bachelier, D. Mehdi, Robust matrix DU -stability analysis, International Journal of Robust and Nonlinear Control, 13 (2003), pp. 533-558
work page 2003
-
[25]
O. Bachelier, D. Henrion, B. Pradin, D. Mehdi, Robust root-clustering of a matrix in intersections or unions of regions , SIAM J. Control Optim., 43 (2004), pp. 1078–1093
work page 2004
-
[26]
C. Bahl, B. Cain, The inertia of diagonal multiples of 3 × 3 real matrices, Linear Algebra Appl., 18 (1997), pp. 267–280
work page 1997
-
[27]
Ballantine, Stabilization by a diagonal matrix , Proc
C.S. Ballantine, Stabilization by a diagonal matrix , Proc. Amer. Math. Soc., 25 (1970), pp. 728–734
work page 1970
-
[28]
Barker, Common solutions to the Lyapunov equations , Linear Alge- bra Appl., 16 (1977), pp
G.P. Barker, Common solutions to the Lyapunov equations , Linear Alge- bra Appl., 16 (1977), pp. 233–235
work page 1977
- [29]
-
[30]
Y.S. Barkovsky, Rank-one perturbations method and differential operators of oscillatory type (in Russian), PhD Thesis, Rostov-on-Don, 1980. 87
work page 1980
-
[31]
Y.S. Barkovsky, T.V. Ogorodnikova, On matrices with positive and simple spectra, Izvestiya SKNC VSH Natural sciences 4 (1987), 65–70
work page 1987
-
[32]
Y.S. Barkovsky, V.I. Yudovich, The momenta problem and spectral theory of the operators , Izvestiya SKNC VSH Natural sciences 4 (1975), 49–53
work page 1975
-
[33]
Barmish, New tools for robustness of linear systems , Macmillan, New York, 1994
B.R. Barmish, New tools for robustness of linear systems , Macmillan, New York, 1994
work page 1994
-
[34]
B. Beavis, I.M. Dobbs, Optimization and stability theory for economic analysis, Cambridge University Press, 1990
work page 1990
-
[35]
Bellman, Introduction to matrix analysis , McGraw Hill, New York, 2nd edition, 1970
R. Bellman, Introduction to matrix analysis , McGraw Hill, New York, 2nd edition, 1970
work page 1970
- [36]
- [37]
- [38]
-
[39]
A. Berman, R.J. Plemmons, Nonnegative Matrices in the Mathematical Sciences, Academic Press, New York, 1979
work page 1979
-
[40]
A. Berman, R.C. Ward, Classes of stable and semipositive matrices, Linear Algebra Appl., 21 (1978), pp. 163-174
work page 1978
-
[41]
A. Berman, R.S. Varga, R.C. Ward, Matrices with nonpositive off-diagonal entries, Linear Algebra Appl., 21 (1978), pp. 233-244
work page 1978
-
[42]
B. Besselink, H.R. Feyzmahdavian, H. Sandberg, M. Johansson , D- stability and delay-independent stability of monotone non linear systems with max-separable Lyapunov functions , IEEE Conference on Decision and Control (CDC), (2016), pp. 3172–3177
work page 2016
- [43]
- [44]
- [45]
-
[46]
Bhatia, Positive definite matrices , Princeton University Press, 2007
R. Bhatia, Positive definite matrices , Princeton University Press, 2007
work page 2007
-
[47]
S. Bhattacharya, H. Chapellat, L. Keel, Robust control: the parametric approach, Prentice-Hall, New Jersey, 1995
work page 1995
-
[48]
T.A. Bickart, E.I. Jury, Regions of polynomial root clustering, Journal of the Franklin Institute, 304 (1977), pp. 149-160. 88
work page 1977
-
[49]
T.A. Bickart, E.I. Jury, The Schwarz–Christoffel transformation and poly- nomial root clustering, IF AC Proceedings Volumes 11 (1978), pp. 1171- 1176
work page 1978
-
[50]
T.A. Bickart, E.I. Jury, Polynomial root clustering, Journal of the Franklin Institute, 308 (1979), pp. 487-496
work page 1979
-
[51]
J. Bierkens, A. Ran, A singular M -matrix perturbed by a nonnegative rank- one matrix has positive principal minors; is it D-stable? Linear Algebra Appl., 457 (2014), pp. 191–208
work page 2014
-
[52]
F. Blanchini, E. Franco, G. Giordano, Determining the structural proper- ties of a class of biological models , 51th IEEE Conference on Decision and Control (2012), pp. 5505–5510
work page 2012
-
[53]
S. Boyd, L. El Ghaoui, E. Feron, V. Balakrishnan, Linear matrix inequal- ities in system and control theory , SIAM, 1994
work page 1994
-
[54]
P. Borwein, T. Erdelyi, Polynomials and polynomial inequalities , Springer, 1995
work page 1995
-
[55]
Burlakova, D-stable 4th-order matrices, J
L.A. Burlakova, D-stable 4th-order matrices, J. Sovremennie technologii. Systemniy analiz. Modelirovanie 1 (21) (2009), 109-116
work page 2009
-
[56]
L.A. Burlakova, Conditions of D-stability of the fifth-order matrices, in: Gerdt V.P., Mayr E.W., Vorozhtsov E.V. (eds) Computer Algebra in Sci- entific Computing. Lecture Notes in Computer Science, Springer, B erlin, Heidelberg 5743 (2009), pp. 54-65
work page 2009
-
[57]
Butkovi˘ c,Max-linear systems: theory and algorithms, Springer-Verlag London Limited 2010
P. Butkovi˘ c,Max-linear systems: theory and algorithms, Springer-Verlag London Limited 2010
work page 2010
-
[58]
Cain, Real, 3 × 3, D-stable matrices, J
B. Cain, Real, 3 × 3, D-stable matrices, J. Res. Nat. Bur. Standards Sect. B, 80B (1976), 75–77
work page 1976
-
[59]
Cain, Inside the D-stable matrices, Linear Algebra Appl., 56 (1984), 237–243
B. Cain, Inside the D-stable matrices, Linear Algebra Appl., 56 (1984), 237–243
work page 1984
-
[60]
Cain, Convergent multiples of convergent operators, Linear Algebra Appl., 299 (1999), 171–173
B. Cain, Convergent multiples of convergent operators, Linear Algebra Appl., 299 (1999), 171–173
work page 1999
- [61]
- [62]
- [63]
-
[64]
D. Carlson, Controllability, inertia and stability for tridiagonal ma trices, Linear Algebra Appl., 56 (1984), pp. 207–220. 89
work page 1984
-
[65]
Carlson, A class of positive stable matrices , J
D. Carlson, A class of positive stable matrices , J. Res. Nat. Bur. Standards Sect. B, 78B (1974), pp. 1–2
work page 1974
-
[66]
Carlson, A new criterion for H-stability of complex matrices , Linear Algebra Appl., 1 (1968), pp
D. Carlson, A new criterion for H-stability of complex matrices , Linear Algebra Appl., 1 (1968), pp. 59–64
work page 1968
-
[67]
D. Carlson, B. Datta, The Lyapunov matrix equation SA + A∗ S = S∗ B∗ BS, Linear Algebra Appl., 28 (1979), pp. 43–52
work page 1979
-
[68]
D. Carlson, B. Datta, C. Johnson, A semi-definite Lyapunov theorem and the characterization of tridiagonal D-stable matrices , SIAM J. Alg. Disc. Meth., 3 (1982), pp. 293–304
work page 1982
-
[69]
D. Carlson, D. Hershkowitz, D. Shasha, Block diagonal semistability fac- tors and Lyapunov semistability of block triangular matric es, Linear Alge- bra Appl., 172 (1992), pp. 1–25
work page 1992
-
[70]
D. Carlson, H. Schneider, Inertia theorems for matrices: the semidefinite case, Journal of Math. Analysis and Appl. 6 (1963), 430–446
work page 1963
-
[71]
Cauchy, Calcul des indices des fonctions, J
A.L. Cauchy, Calcul des indices des fonctions, J. ´Ecole Polytech. 15, 176–229 (1837) (Œuvres 1(2), 416–466)
-
[72]
Chen, A generalization of the inertia theorem , SIAM J
C.-T. Chen, A generalization of the inertia theorem , SIAM J. Appl. Math., 25 (1973), pp. 158–161
work page 1973
-
[73]
Chen, Linear system theory and design , 3rd Ed
C.-T. Chen, Linear system theory and design , 3rd Ed. Oxford University Press, 1999
work page 1999
-
[74]
J. Chen, M. Fan, Ch.-Ch. Yu, On D-stability and structured singular val- ues, Systems and Control letters, 24 (1995), pp. 19–24
work page 1995
-
[75]
M. Chilali, P. Gahinet, H∞ design with pole placement constraints: an LMI approach, IEEE Transactions on Automatic Control, 41 (1996), pp. 358–367
work page 1996
-
[76]
M. Chilali, P. Gahinet, P. Apkarian, Robust pole placement in LMI regions, Proceedings of the 36th Conference on Decision and Control San D iego, USA, 1997, pp. 1291–1296
work page 1997
-
[77]
D. Choi, Inequalities related to partial trace and block Hadamard pr oduct, Linear and Multilinear Algebra, 66 (2018), pp. 280-284
work page 2018
-
[78]
T. Chu, An equivalent condition for stability properties of Lotka– Volterra systems, Physics Letters A 368 (2007), pp. 235-237
work page 2007
-
[79]
A. Cohn, ¨Uber die Anzahl der Wurzeln einer algebraischen Gleichung i n einem Kreise , Mathematische Zeitschrift, 14 (1922), pp. 110-148
work page 1922
-
[80]
Cross, Three types of matrix stability , Linear Algebra Appl., 20 (1978), pp
G.W. Cross, Three types of matrix stability , Linear Algebra Appl., 20 (1978), pp. 253–263
work page 1978
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.