DroneDAR: Long-Range Drone Distance Estimation Using Monocular Vision and Bounding-Box Features
Pith reviewed 2026-06-27 22:04 UTC · model grok-4.3
The pith
DroneDAR estimates long-range drone distances by gating convolutional features with bounding-box geometry.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
DroneDAR integrates a convolutional backbone with explicit bounding-box cues through a lightweight gating mechanism to predict range from detector-supplied image crops. Experiments show how backbone capacity, crop resolution, and regression loss functions affect performance across distance regimes and identify common long-range failure modes including bounding-box noise sensitivity and reduced texture detail.
What carries the argument
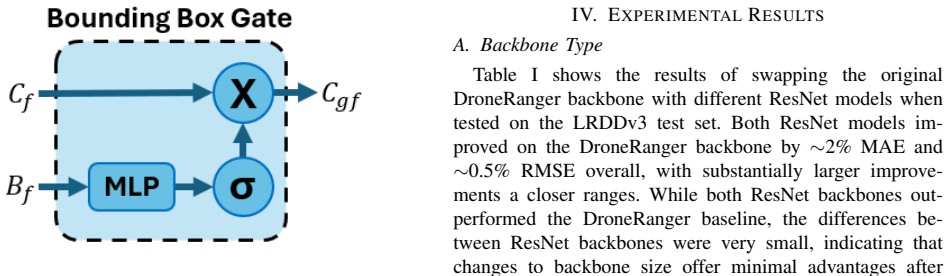
The lightweight gating mechanism that fuses convolutional appearance features extracted from the crop with explicit bounding-box geometry cues.
If this is right
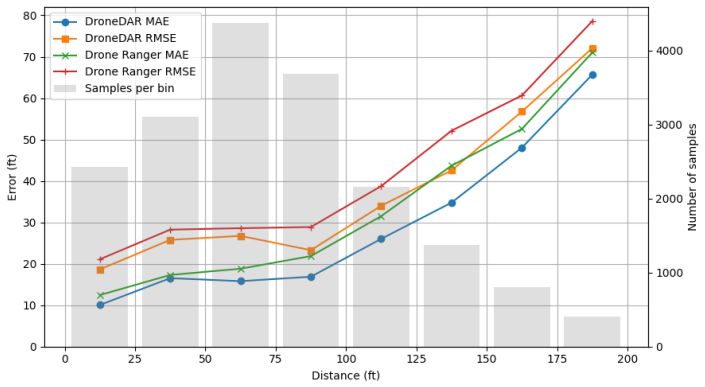
- Backbone capacity, crop resolution, and choice of regression loss affect estimation accuracy differently across short, medium, and long distance regimes.
- Bounding-box noise and loss of texture detail in the crop are primary sources of error at long distances.
- The results supply concrete design guidance for training range estimators that remain functional under real-world long-range conditions.
Where Pith is reading between the lines
- The gating approach could be tested on other small-object ranging tasks that also receive detector crops, such as distant vehicles or birds.
- Performance under varying detector qualities would quantify how much the method depends on box accuracy.
- Pairing the single-frame estimator with multi-frame temporal filtering might mitigate cases where texture detail is minimal.
Load-bearing premise
A detector will supply bounding boxes accurate enough for the gating mechanism to help, and the cropped image still contains usable appearance information even when the drone occupies only a few pixels.
What would settle it
Compare DroneDAR performance against the ungated baseline on the same long-range test set after deliberately adding increasing levels of noise to the supplied bounding boxes; if the gating advantage vanishes, the central claim does not hold.
Figures


read the original abstract
Accurate distance estimation for small drones in long-range imagery is important for tracking and situational awareness, yet remains challenging due to extreme target scale variation, background clutter, and noisy visual cues. This paper studies monocular drone distance estimation using image crops together with bounding-box geometry, a practical setting in which a detector provides a candidate drone region and the model predicts range from appearance and box-derived features. We evaluate a Droneranger-style baseline, and introduce a new DroneDAR (Drone Detection And Ranging) model that combines a convolutional backbone with explicit bounding-box cues through a lightweight gating mechanism. Experiments analyze how backbone capacity, crop resolution, and regression loss functions affect performance across distance regimes. We further examine common failure modes at long distances, including sensitivity to bounding-box noise and reduced texture detail in the crop. The results provide guidance for designing and training range estimators that remain robust under real-world long-range conditions and highlight directions for improving reliability when drones occupy only a few pixels.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces DroneDAR, a model that fuses a convolutional backbone with explicit bounding-box geometry via a lightweight gating mechanism for monocular distance estimation of small drones. It compares this to a Droneranger-style baseline, analyzes effects of backbone capacity, crop resolution, and regression losses across distance regimes, and examines failure modes including bounding-box noise sensitivity and loss of texture detail when targets occupy few pixels.
Significance. If the gating mechanism can be shown to deliver measurable gains under controlled conditions for long-range cases, the work would supply useful empirical guidance for practical monocular drone ranging systems. The current text, however, supplies no quantitative metrics, error bars, or dataset specifications, so the practical significance cannot yet be evaluated.
major comments (2)
- Abstract: the description of experiments states that performance is analyzed across distance regimes and that failure modes are examined, yet no quantitative results, error bars, dataset details, or numerical metrics are reported, rendering the central performance claims unverifiable from the provided text.
- Experiments section (implied by abstract): the manuscript flags sensitivity to bounding-box noise and reduced texture detail as common long-range failure modes, but provides no indication that experiments isolate the gating mechanism's contribution under controlled box noise or in sub-10-pixel regimes; without such isolation the reported deltas cannot be attributed to the proposed architecture.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback highlighting the need for verifiable quantitative details and clearer experimental isolation. We address each major comment below and will revise the manuscript to incorporate the suggested improvements.
read point-by-point responses
-
Referee: Abstract: the description of experiments states that performance is analyzed across distance regimes and that failure modes are examined, yet no quantitative results, error bars, dataset details, or numerical metrics are reported, rendering the central performance claims unverifiable from the provided text.
Authors: We agree that the abstract would benefit from explicit numerical support. In the revised version we will expand the abstract to include key metrics such as mean absolute error and standard deviation across distance regimes, along with dataset specifications (image count, distance distribution) and error bars, ensuring the central claims are directly verifiable. revision: yes
-
Referee: Experiments section (implied by abstract): the manuscript flags sensitivity to bounding-box noise and reduced texture detail as common long-range failure modes, but provides no indication that experiments isolate the gating mechanism's contribution under controlled box noise or in sub-10-pixel regimes; without such isolation the reported deltas cannot be attributed to the proposed architecture.
Authors: The current experiments compare DroneDAR (with gating) against the baseline and analyze performance across regimes while noting bounding-box noise sensitivity as a failure mode. To strengthen attribution, we will add controlled ablation experiments that systematically inject calibrated bounding-box noise and restrict evaluation to sub-10-pixel targets, directly quantifying the gating mechanism's contribution relative to the baseline. revision: yes
Circularity Check
No circularity: empirical model with no derivations or self-referential steps
full rationale
The paper is an empirical computer-vision contribution that introduces an architecture (convolutional backbone plus lightweight gating on bounding-box features) and reports experimental results on distance regression. No equations, first-principles derivations, fitted parameters presented as predictions, or self-citation chains to uniqueness theorems appear in the abstract or description. The central claim is an architectural fusion whose benefit is evaluated experimentally rather than derived by construction from its own inputs. Therefore no load-bearing step reduces to a self-definition or renaming of known results.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Droneranger: Vision- driven deep learning for drone distance estimation,
H. Azad, V . Mehta, I. Mantegh, and M. Bolic, “Droneranger: Vision- driven deep learning for drone distance estimation,” in2024 Interna- tional Conference on Unmanned Aircraft Systems (ICUAS), 2024
2024
-
[2]
The drone-vs-bird detection grand challenge at icassp 2023: A review of methods and results,
A. Coluccia, A. Fascista, L. Sommer, A. Schumann, A. Dimou, and D. Zarpalas, “The drone-vs-bird detection grand challenge at icassp 2023: A review of methods and results,”IEEE Open Journal of Signal Processing, vol. 5, pp. 766–779, 2024
2023
-
[3]
Air-to-air visual detection of micro-uavs: An experimental evaluation of deep learning,
Y . Zheng, Z. Chen, D. Lv, Z. Li, Z. Lan, and S. Zhao, “Air-to-air visual detection of micro-uavs: An experimental evaluation of deep learning,”IEEE Robotics and Automation Letters, vol. 6, no. 2, pp. 1020–1027, 2021
2021
-
[4]
Lrddv3: High- resolution long-range drone detection dataset with range information and thermal data,
K. Peterson, Z. Mayers, A. Yousuf, P. Chowdhury, A. Zaczepinski, S. Arezoomandan, R. Maarefdoust, and D. Han, “Lrddv3: High- resolution long-range drone detection dataset with range information and thermal data,” in2026 IEEE International Conference on Robotics and Automation (ICRA), 2026
2026
-
[5]
Reconstruction of 3d flight trajectories from ad-hoc camera networks,
J. Li, J. Murray, D. Ismaili, K. Schindler, and C. Albl, “Reconstruction of 3d flight trajectories from ad-hoc camera networks,” in2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020, pp. 1621–1628
2020
-
[6]
uav detect dataset,
GET, “uav detect dataset,” https://universe.roboflow.com/get/uav- detect-pfiqs , jan 2023, visited on 2025-09-15. [Online]. Available: https://universe.roboflow.com/get/uav-detect-pfiqs
2023
-
[7]
A vision- based approach to uav detection and tracking in cooperative applications,
R. Opromolla, G. Fasano, and D. Accardo, “A vision- based approach to uav detection and tracking in cooperative applications,”Sensors, vol. 18, no. 10, 2018. [Online]. Available: https://www.mdpi.com/1424-8220/18/10/3391
2018
-
[8]
Vision-based detection and distance estimation of micro unmanned aerial vehicles,
F. G ¨okc ¸e, G. ¨Uc ¸oluk, E. S ¸ahin, and S. Kalkan, “Vision-based detection and distance estimation of micro unmanned aerial vehicles,” Sensors, vol. 15, no. 9, pp. 23 805–23 846, 2015. [Online]. Available: https://www.mdpi.com/1424-8220/15/9/23805
2015
-
[9]
How far can a drone be detected? a drone-to-drone detection system using sensor fusion,
J. Kim, Y . Kim, H. Shin, M. Wang, and E. Matson, “How far can a drone be detected? a drone-to-drone detection system using sensor fusion,” in15th International Conference on Agents and Artificial Intelligence (ICAART 2023), 01 2023, pp. 877–884
2023
-
[10]
You only look once: Unified, real-time object detection,
J. Redmon, S. K. Divvala, R. B. Girshick, and A. Farhadi, “You only look once: Unified, real-time object detection,”CoRR, vol. abs/1506.02640, 2015. [Online]. Available: http://arxiv.org/abs/1506.02640
Pith/arXiv arXiv 2015
-
[11]
Deformable detr: Deformable transformers for end-to-end object detection,
X. Zhu, W. Su, L. Lu, B. Li, X. Wang, and J. Dai, “Deformable detr: Deformable transformers for end-to-end object detection,”arXiv preprint arXiv:2010.04159, 2020
Pith/arXiv arXiv 2010
-
[12]
Slicing Aided Hyper Inference and Fine-Tuning for Small Object Detection,
F. C. Akyon, S. Onur Altinuc, and A. Temizel, “Slicing aided hyper inference and fine-tuning for small object detection,” in2022 IEEE International Conference on Image Processing (ICIP). IEEE, 2022. [Online]. Available: http://dx.doi.org/10.1109/ICIP46576.2022.9897990
-
[13]
L. Yang, B. Kang, Z. Huang, Z. Zhao, X. Xu, J. Feng, and H. Zhao, “Depth anything v2,”arXiv:2406.09414, 2024
Pith/arXiv arXiv 2024
-
[14]
Metric3d v2: A versatile monocular geometric foundation model for zero-shot metric depth and surface normal estimation,
M. Hu, W. Yin, C. Zhang, Z. Cai, X. Long, H. Chen, K. Wang, G. Yu, C. Shen, and S. Shen, “Metric3d v2: A versatile monocular geometric foundation model for zero-shot metric depth and surface normal estimation,”IEEE Transactions on Pattern Analysis and Machine Intelligence, 2024
2024
-
[15]
Depth pro: Sharp monocular metric depth in less than a second,
A. Bochkovskii, A. Delaunoy, H. Germain, M. Santos, Y . Zhou, S. R. Richter, and V . Koltun, “Depth pro: Sharp monocular metric depth in less than a second,” inInternational Conference on Learning Representations, 2025. [Online]. Available: https://arxiv.org/abs/2410.02073
Pith/arXiv arXiv 2025
-
[16]
Vision-based detection and pose estimation for formation of micro aerial vehicles,
M. Zhang, F. Lin, and B. M. Chen, “Vision-based detection and pose estimation for formation of micro aerial vehicles,” in2014 13th International Conference on Control Automation Robotics & Vision (ICARCV), 2014, pp. 1473–1478
2014
-
[17]
Vision-based formation for uavs,
F. Lin, K. Peng, X. Dong, S. Zhao, and B. M. Chen, “Vision-based formation for uavs,” in11th IEEE International Conference on Control & Automation (ICCA), 2014, pp. 1375–1380
2014
-
[18]
Gated multimodal units for information fusion,
J. Arevalo, T. Solorio, M. M. y G ´omez, and F. A. Gonz ´alez, “Gated multimodal units for information fusion,” 2017. [Online]. Available: https://arxiv.org/abs/1702.01992
Pith/arXiv arXiv 2017
-
[19]
Feature fusion module based on gate mechanism for object detection,
Z. Sun, D. Jin, J. Deng, M. Zhang, and Z. Shao, “Feature fusion module based on gate mechanism for object detection,” inIEEE International Conference on Robotics and Biomimetics, 2023
2023
-
[20]
Gated-attention feature-fusion based framework for poverty prediction,
M. U. Ramzan, W. Khaddim, M. E. Rana, U. Ali, M. Ali, F. ul Hassan, and F. Mehmood, “Gated-attention feature-fusion based framework for poverty prediction,” inInnovations in Communication Networks: Sustainability for Societal and Industrial Impact, V . Bhateja, V . Ab- dul Hameed, S. K. Udgata, and A. T. Azar, Eds. Singapore: Springer Nature Singapore, 20...
2025
-
[21]
A dataset for multi-sensor drone detection,
F. Svanstr ¨om, F. Alonso-Fernandez, and C. Englund, “A dataset for multi-sensor drone detection,”Data in Brief, vol. 39, p. 107521, 2021. [Online]. Available: https://www.sciencedirect.com/science/article/pii/S2352340921007976
2021
-
[22]
Long-range drone detection dataset,
A. Rouhi, H. Umare, S. Patal, R. Kapoor, N. Deshpande, S. Are- zoomandan, P. Shah, and D. Han, “Long-range drone detection dataset,” in2024 IEEE International Conference on Consumer Elec- tronics (ICCE), 2024
2024
-
[23]
Lrddv2: Enhanced long-range drone detection dataset with range information and comprehensive real-world challenges,
A. Rouhi, S. Patel, N. McCarthy, S. Khan, H. Khorsand, K. Lefkowitz, and D. Han, “Lrddv2: Enhanced long-range drone detection dataset with range information and comprehensive real-world challenges,” in 2024 International Symposium of Robotics Research (ISRR), 2024
2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.