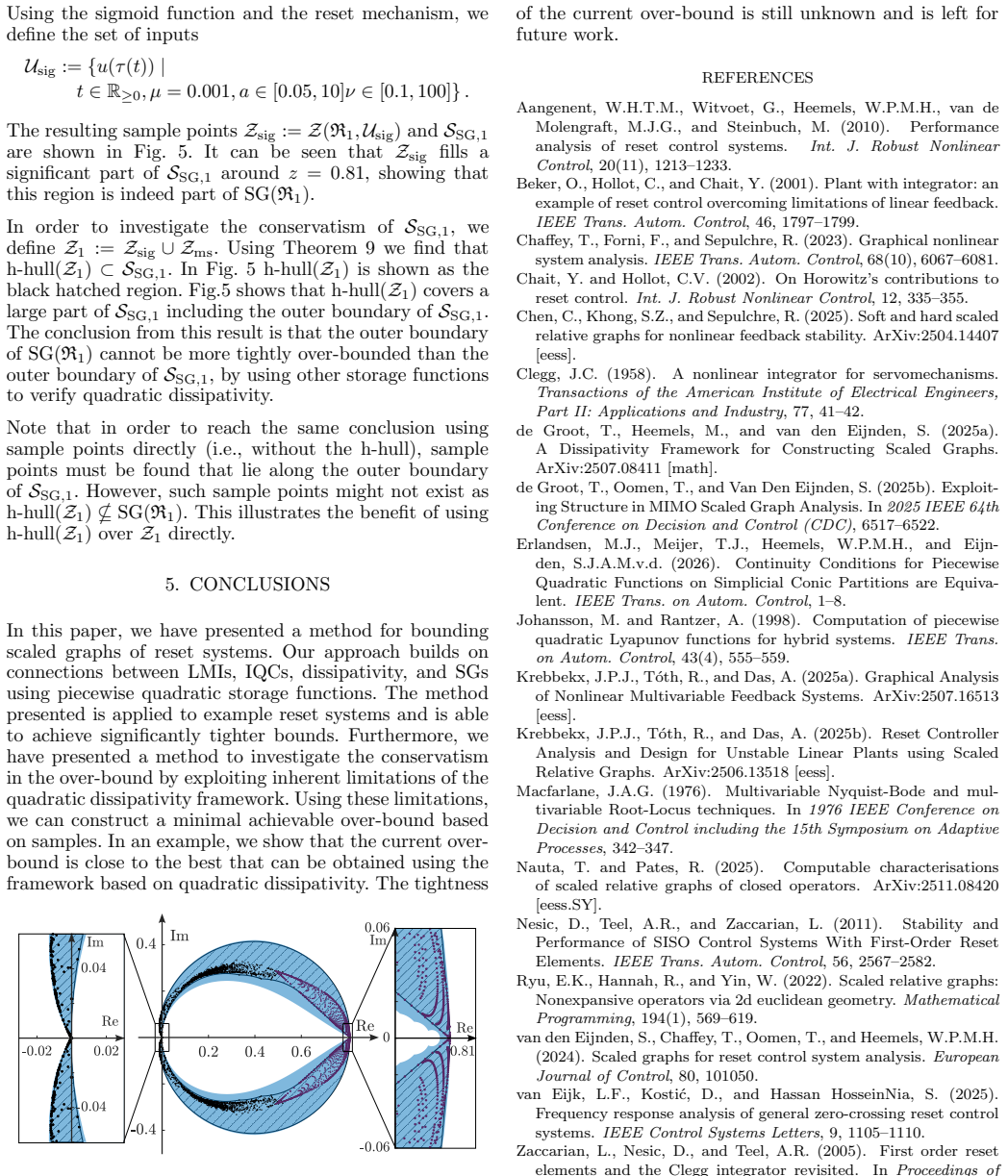
Scaled Graph Bounding Techniques for Reset Systems
Pith reviewed 2026-05-21 03:33 UTC · model grok-4.3
The pith
Scaled graph over-bounding for reset systems reduces exactly to searching for piecewise quadratic storage functions, yet sampling exposes a basic limitation in all quadratic dissipativity approximations.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
We exploit connections between quadratic dissipativity and scaled graphs to recast the over-bounding problem as the search for piecewise quadratic storage functions. Using specific sampling techniques, we reveal a fundamental limitation of general scaled graph approximation methods that are based on quadratic dissipativity.
What carries the argument
The equivalence between quadratic dissipativity and scaled-graph over-bounding, which converts the bounding task into an optimization over piecewise quadratic storage functions.
If this is right
- Over-bounding can be performed by solving existing optimization problems for piecewise quadratic functions.
- The accuracy of the resulting bounds can be quantified directly from the sampling procedure.
- Graphical loopshaping-style design becomes feasible for reset systems once the bounds are available.
- No general quadratic-dissipativity method can avoid the identified limitation.
Where Pith is reading between the lines
- The same sampling approach could be used to test other dissipativity-based bounds in hybrid systems.
- Control engineers working on mechanical or electronic reset systems might obtain practical performance guarantees from these over-bounds.
- Extensions to higher-order or non-quadratic storage functions could remove the revealed limitation.
Load-bearing premise
The established connections between quadratic dissipativity and scaled graphs are tight enough to convert the over-bounding task exactly into a search for piecewise quadratic storage functions.
What would settle it
Take a simple reset system, compute its exact scaled graph over a grid of frequencies, and compare it to the tightest bound obtainable from any quadratic-dissipativity storage function; any persistent gap that sampling cannot close would disprove the claimed limitation or the exactness of the recasting.
Figures




read the original abstract
Reset systems can overcome fundamental limitations of linear time-invariant control. The recently introduced notion of scaled (relative) graphs provides a promising framework for developing graphical analysis and design tools for reset systems, in line with widely adopted loopshaping methods for linear systems. The aim of this paper is to derive techniques for over-bounding the scaled graph of reset systems, and obtain insights in their accuracy. We exploit connections between quadratic dissipativity and scaled graphs to recast the over-bounding problem as the search for piecewise quadratic storage functions. Using specific sampling techniques, we reveal a fundamental limitation of general scaled graph approximation methods that are based on quadratic dissipativity.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript claims to derive over-bounding techniques for the scaled graphs of reset systems by exploiting connections between quadratic dissipativity and scaled graphs, thereby recasting the over-bounding problem exactly as a search for piecewise quadratic storage functions. It then applies specific sampling techniques to demonstrate a fundamental limitation of general scaled-graph approximation methods that rely on quadratic dissipativity.
Significance. If the limitation holds beyond the sampled instances, the work would usefully constrain expectations for quadratic-dissipativity-based graphical tools for reset systems and could inform the search for tighter, non-quadratic alternatives. The explicit recasting of the bounding task as a piecewise-quadratic storage-function problem is a constructive contribution that aligns with existing dissipativity theory.
major comments (1)
- [Section describing the sampling techniques and numerical results] The central claim that specific sampling techniques reveal a 'fundamental limitation' of all quadratic-dissipativity-based scaled-graph approximations is load-bearing yet rests on finite samples. The abstract states that the over-bounding problem is recast as the search for piecewise quadratic storage functions; however, without an accompanying argument that no quadratic storage function outside the sampled set can close the observed gap, the limitation remains potentially sample-dependent rather than inherent to the entire class.
minor comments (2)
- Clarify the precise sampling distribution and the stopping criterion used to declare that a gap cannot be closed; this would help readers assess whether the reported limitation is exhaustive within the quadratic class.
- Add a short remark on how the piecewise-quadratic formulation relates to existing sum-of-squares or LMI relaxations for reset systems, to situate the contribution within the broader literature.
Simulated Author's Rebuttal
We thank the referee for the careful reading of the manuscript and the constructive comments. We address the major comment below.
read point-by-point responses
-
Referee: [Section describing the sampling techniques and numerical results] The central claim that specific sampling techniques reveal a 'fundamental limitation' of all quadratic-dissipativity-based scaled-graph approximations is load-bearing yet rests on finite samples. The abstract states that the over-bounding problem is recast as the search for piecewise quadratic storage functions; however, without an accompanying argument that no quadratic storage function outside the sampled set can close the observed gap, the limitation remains potentially sample-dependent rather than inherent to the entire class.
Authors: The sampling techniques are constructed to provide a dense covering of the relevant state, input, and reset-event domains for the systems under study, with the explicit goal of testing whether any quadratic storage function (equivalently, any quadratic dissipativity certificate) can close the gap. Because the over-bounding task is exactly equivalent to the existence of a piecewise-quadratic storage function satisfying the associated LMIs, the consistent positive gap observed across this dense sample set supplies numerical evidence that the limitation is structural rather than an artifact of sparse sampling. We acknowledge, however, that a general proof ruling out every possible quadratic storage function (sampled or unsampled) is not supplied. We will therefore revise the manuscript to (i) describe the sampling density and its relation to the dissipativity LMIs in greater detail and (ii) qualify the claim as “strong numerical evidence of a fundamental limitation” while retaining the original abstract wording that the limitation is revealed by the sampling procedure. revision: partial
Circularity Check
No significant circularity; sampling-based limitation claim is independent of fitted inputs or self-referential definitions
full rationale
The paper exploits connections between quadratic dissipativity and scaled graphs to recast over-bounding as a piecewise quadratic storage function search, then applies specific sampling techniques to identify a limitation of quadratic dissipativity-based approximations. This does not reduce any prediction or central result to a quantity defined by parameters fitted within the paper, nor does it invoke self-citations as load-bearing uniqueness theorems. The derivation chain remains self-contained, with the limitation claim arising from external sampling evidence rather than by construction from the inputs or prior self-referential steps.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Quadratic dissipativity connects to scaled graphs such that over-bounding reduces to searching for piecewise quadratic storage functions
Reference graph
Works this paper leans on
-
[1]
Molengraft, M.J.G., and Steinbuch, M. (2010). Performance analysis of reset control systems.Int. J. Robust Nonlinear Control, 20(11), 1213–1233
work page 2010
-
[2]
Beker, O., Hollot, C., and Chait, Y. (2001). Plant with integrator: an example of reset control overcoming limitations of linear feedback. IEEE Trans. Autom. Control, 46, 1797–1799
work page 2001
-
[3]
Chaffey, T., Forni, F., and Sepulchre, R. (2023). Graphical nonlinear system analysis.IEEE Trans. Autom. Control, 68(10), 6067–6081
work page 2023
-
[4]
Chait, Y. and Hollot, C.V. (2002). On Horowitz’s contributions to reset control.Int. J. Robust Nonlinear Control, 12, 335–355
work page 2002
-
[5]
Chen, C., Khong, S.Z., and Sepulchre, R. (2025). Soft and hard scaled relative graphs for nonlinear feedback stability. ArXiv:2504.14407 [eess]
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[6]
Clegg, J.C. (1958). A nonlinear integrator for servomechanisms. Transactions of the American Institute of Electrical Engineers, Part II: Applications and Industry, 77, 41–42. de Groot, T., Heemels, M., and van den Eijnden, S. (2025a). A Dissipativity Framework for Constructing Scaled Graphs. ArXiv:2507.08411 [math]. de Groot, T., Oomen, T., and Van Den Ei...
-
[7]
Erlandsen, M.J., Meijer, T.J., Heemels, W.P.M.H., and Eijn- den, S.J.A.M.v.d. (2026). Continuity Conditions for Piecewise Quadratic Functions on Simplicial Conic Partitions are Equiva- lent.IEEE Trans. on Autom. Control, 1–8
work page 2026
-
[8]
Johansson, M. and Rantzer, A. (1998). Computation of piecewise quadratic Lyapunov functions for hybrid systems.IEEE Trans. on Autom. Control, 43(4), 555–559
work page 1998
-
[9]
Krebbekx, J.P.J., T´ oth, R., and Das, A. (2025a). Graphical Analysis of Nonlinear Multivariable Feedback Systems. ArXiv:2507.16513 [eess]
work page internal anchor Pith review Pith/arXiv arXiv
- [10]
-
[11]
Macfarlane, J.A.G. (1976). Multivariable Nyquist-Bode and mul- tivariable Root-Locus techniques. In1976 IEEE Conference on Decision and Control including the 15th Symposium on Adaptive Processes, 342–347
work page 1976
-
[12]
Computable Characterisations of Scaled Relative Graphs of Closed Operators
Nauta, T. and Pates, R. (2025). Computable characterisations of scaled relative graphs of closed operators. ArXiv:2511.08420 [eess.SY]
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[13]
Nesic, D., Teel, A.R., and Zaccarian, L. (2011). Stability and Performance of SISO Control Systems With First-Order Reset Elements.IEEE Trans. Autom. Control, 56, 2567–2582
work page 2011
-
[14]
Ryu, E.K., Hannah, R., and Yin, W. (2022). Scaled relative graphs: Nonexpansive operators via 2d euclidean geometry.Mathematical Programming, 194(1), 569–619. van den Eijnden, S., Chaffey, T., Oomen, T., and Heemels, W.P.M.H. (2024). Scaled graphs for reset control system analysis.European Journal of Control, 80, 101050. van Eijk, L.F., Kosti´ c, D., and ...
work page 2022
-
[15]
Zaccarian, L., Nesic, D., and Teel, A.R. (2005). First order reset elements and the Clegg integrator revisited. InProceedings of the 2005, American Control Conference, 2005., 563–568. IEEE,
work page 2005
-
[16]
Zheng, Y., Chait, Y., Hollot, C.V., Steinbuch, M., and Norg, M. (2000). Experimental demonstration of reset control design. Control Engineering Practice, 8, 113–120
work page 2000
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.