Behavioral Data-Driven Optimal Trajectory Generation for Rotary Cranes
Pith reviewed 2026-06-30 20:30 UTC · model grok-4.3
The pith
A behavioral data-driven approach generates optimal open-loop trajectories for rotary cranes that suppress load sway using limited input-output data.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central claim is that despite the underactuated nature of rotary crane dynamics, a nonparametric representation can be identified from limited measured input-output data using Willems' fundamental lemma, enabling the generation of smooth optimal trajectories via convex optimization that achieve better performance in reducing load sway, tracking error, and travel time compared to established model-based approaches.
What carries the argument
Willems' fundamental lemma and its generalizations, which allow constructing a nonparametric representation of the system behavior directly from input-output data to formulate trajectory optimization as a convex problem.
If this is right
- Up to 35% reduction in load sway compared to model-based method.
- Up to 43% reduction in tracking error.
- Up to 50% reduction in travel time.
- The method operates with limited data and no explicit modeling, making it more accessible.
- Produces smooth trajectories suitable for open-loop control.
Where Pith is reading between the lines
- Similar data-driven methods could apply to other underactuated mechanical systems like pendulums or robots.
- The approach might reduce reliance on precise parameter identification in industrial crane automation.
- Extensions could incorporate real-time feedback by updating the data-based representation online.
- Testing on full-scale cranes would be needed to confirm scalability beyond the laboratory setup.
Load-bearing premise
That Willems' fundamental lemma and its generalizations can be applied directly to the underactuated rotary crane system to create an accurate nonparametric representation from limited data without modeling.
What would settle it
An experiment where the data-driven trajectories produce more load sway or longer travel times than the model-based method on the same crane setup would falsify the performance claims.
Figures


read the original abstract
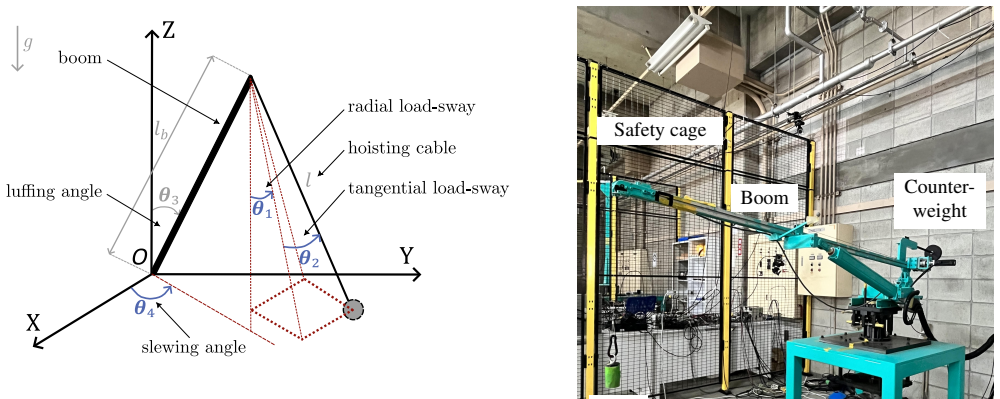
With the growth of the construction industry and the global shortage of skilled labor, the automation of crane control has become increasingly important for safe and efficient operations. A central challenge in automatic crane control is the reduction of load oscillations during motion, which is primarily addressed through appropriate slewing trajectories. In this context, classical model-based control methods rely on accurate dynamical models and expert tuning, and often struggle to meet safety and precision requirements, while many learning-based approaches require large data sets and significant computational resources. This paper proposes a behavioral data-driven framework for generating open-loop slewing trajectories for rotary cranes that suppress load sway while reducing operation time and energy consumption. The approach builds on Willems' fundamental lemma and its generalizations, to bypass explicit system modeling and operate directly on measured input-output data. A practical workflow is presented in this paper to reduce the need for expert knowledge. Despite the underactuated nature of the crane dynamics, the method identifies a nonparametric representation of the system behavior and generates smooth, optimal trajectories using limited data and convex optimization. The proposed trajectory generation method is validated on a laboratory crane setup and compared against an established model-based approach, achieving up to 35% reduction in load sway, 43% reduction in tracking error, and 50% reduction in travel time.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a behavioral data-driven framework for open-loop slewing trajectory generation in rotary cranes. It applies Willems' fundamental lemma and generalizations to identify a nonparametric system representation directly from limited measured input-output data, then solves a convex optimization problem to generate smooth trajectories that suppress load sway while reducing travel time and energy use. The method is presented as bypassing explicit dynamical modeling and expert tuning; laboratory validation on a rotary crane setup reports up to 35% reduction in load sway, 43% in tracking error, and 50% in travel time relative to an established model-based approach.
Significance. If the central assumption that Willems' lemma extends to this nonlinear underactuated system holds and the data satisfy the required rank conditions, the approach would provide a practical, low-data alternative to model-based crane control that reduces reliance on accurate pendulum models and manual tuning. The reported laboratory gains and use of convex optimization on measured data would constitute a concrete demonstration of data-driven trajectory optimization for an underactuated mechanical system.
major comments (2)
- [Section describing the theoretical foundation and application of Willems' lemma (referenced in the abstract as operating] The manuscript invokes Willems' fundamental lemma (and generalizations) to obtain a nonparametric behavioral representation from measured I/O data, yet provides no derivation or explicit verification that the persistency-of-excitation rank condition or the behavioral representation itself is preserved under the nonlinear pendulum dynamics and underactuation of the rotary crane. This assumption is load-bearing for the central claim that limited data alone suffice for convex optimal trajectory generation.
- [Validation and experimental results section] Laboratory performance numbers (35% sway reduction, 43% tracking error, 50% travel time) are stated without reported data access, error bars, statistical tests, exclusion criteria, or explicit confirmation that the collected trajectories satisfy the algebraic requirements of the cited lemma; this prevents independent verification of the nonparametric representation's validity.
minor comments (2)
- [Abstract and practical workflow description] The abstract and workflow description would benefit from a concise statement of the precise data length and excitation conditions used to construct the Hankel matrices.
- [Method formulation] Notation for the behavioral representation and the convex program should be introduced with explicit dimension statements to clarify how the underactuated output (load angle) is handled in the data matrices.
Simulated Author's Rebuttal
We thank the referee for the constructive comments on our manuscript. We address the two major comments point by point below, offering clarifications and committing to revisions where appropriate to strengthen the presentation of the behavioral framework and experimental results.
read point-by-point responses
-
Referee: The manuscript invokes Willems' fundamental lemma (and generalizations) to obtain a nonparametric behavioral representation from measured I/O data, yet provides no derivation or explicit verification that the persistency-of-excitation rank condition or the behavioral representation itself is preserved under the nonlinear pendulum dynamics and underactuation of the rotary crane. This assumption is load-bearing for the central claim that limited data alone suffice for convex optimal trajectory generation.
Authors: We acknowledge that the manuscript does not contain an explicit derivation showing preservation of the rank condition under the crane's nonlinear underactuated dynamics. The approach relies on the behavioral representation and cited generalizations of Willems' lemma, with validity demonstrated through successful experimental application on the physical system. We agree that additional discussion would improve clarity. In revision we will add a brief subsection referencing relevant extensions of the lemma to nonlinear mechanical systems and stating the data collection assumptions used to satisfy persistency of excitation. revision: yes
-
Referee: Laboratory performance numbers (35% sway reduction, 43% tracking error, 50% travel time) are stated without reported data access, error bars, statistical tests, exclusion criteria, or explicit confirmation that the collected trajectories satisfy the algebraic requirements of the cited lemma; this prevents independent verification of the nonparametric representation's validity.
Authors: We agree that the validation section would benefit from greater detail on reproducibility. We will add error bars, statistical summaries, and explicit statements confirming that the collected input trajectories meet the persistency-of-excitation rank conditions. Processed experimental data and code will be made available in a public repository; full raw sensor logs will be provided upon reasonable request subject to laboratory access policies. revision: yes
Circularity Check
No significant circularity; derivation relies on external lemma applied to measured data
full rationale
The paper's central workflow identifies a nonparametric behavioral representation directly from measured input-output data via Willems' fundamental lemma and generalizations, then solves a convex optimization problem for trajectories. No equations or steps reduce by construction to fitted parameters renamed as predictions, self-definitional loops, or load-bearing self-citations whose content is unverified within the paper. Laboratory validation provides an independent empirical check against a model-based baseline. The applicability of the lemma to nonlinear underactuated dynamics is an external assumption (correctness risk) rather than a circular reduction internal to the derivation chain.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Willems' fundamental lemma and its generalizations can be applied to identify a nonparametric representation of underactuated rotary crane behavior directly from measured input-output data.
Reference graph
Works this paper leans on
-
[1]
A. P. Regina Lauer, O. Lerke, A. Gienger, V . Schwieger, O. Sawodny, State estimation with static displace- ment compensation for large-scale manipulators, in: 2023 IEEE/SICE International Symposium on Sys- tem Integration (SII), pp. 1–6, ISSN: 2474-2325. doi:10.1109/SII55687.2023.10039134. URLhttps://ieeexplore.ieee.org/ abstract/document/10039134
-
[2]
A. Shapira, G. Lucko, C. J. Schexnayder, Cranes for building construction projects, Journal of Construc- tion Engineering and Management 133 (9) (2007) 690–700. doi:https://doi.org/10.1061/(ASCE)0733- 9364(2007)133:9(690)
-
[3]
H. Takahashi, A. Farrage, K. Terauchi, S. Sasai, H. Sakurai, M. Okubo, N. Uchiyama, Sensor-less and time-optimal control for load-sway and boom-twist suppression using boom horizontal motion of large cranes 134 104086. doi:10.1016/j.autcon.2021.104086. URLhttps://www.sciencedirect.com/ science/article/pii/S0926580521005379
-
[4]
S. Bonnabel, X. Claeys, The industrial control of tower cranes: An operator-in-the-loop approach [applications in control], IEEE Control Systems Magazine 40 (5) (2020) 27–39. doi:10.1109/MCS.2020.3005256
-
[5]
Z.-S. Hou, Z. Wang, From model-based control to data-driven control: Survey, classification and perspective 235 3–35. doi:10.1016/j.ins.2012.07.014. URLhttps://www.sciencedirect.com/ science/article/pii/S0020025512004781
-
[6]
F. Wolff, N. Uchiyama, M. Burkhardt, O. Sawodny, Nonlinear model predictive control with non- equidistant discretization time grids for rotary cranes, in: 2022 13th Asian Control Confer- ence (ASCC), pp. 1753–1758, ISSN: 2770-8373. doi:10.23919/ASCC56756.2022.9828180. URLhttps://ieeexplore.ieee.org/ document/9828180/?arnumber=9828180
-
[7]
E. Arnold, J. Neupert, O. Sawodny, K. Schneider, Trajectory tracking for boom cranes based on non- linear control and optimal trajectory generation, in: 2007 IEEE International Conference on Con- trol Applications, pp. 1444–1449, ISSN: 1085-1992. doi:10.1109/CCA.2007.4389439. URLhttps://ieeexplore.ieee.org/ abstract/document/4389439
-
[8]
H. Ouyang, N. Uchiyama, S. Sano, Anti-sway con- trol of rotary crane only by horizontal boom motion, in: 2010 IEEE International Conference on Con- trol Applications, pp. 591–595, ISSN: 1085-1992. doi:10.1109/CCA.2010.5611096. 13 URLhttps://ieeexplore.ieee.org/ document/5611096/?arnumber=5611096
-
[9]
H. Ouyang, N. Uchiyama, S. Sano, S-curve trajectory generation for residual load sway suppression in a rotary crane system using only horizontal boom motion, Journal of System Design and Dynamics 5 (7) (2011) 1418–1432. doi:https://doi.org/10.1299/jsdd.5.1418
-
[10]
A. Farrage, H. Takahashi, K. Terauchi, S. Sasai, H. Saku- rai, M. Okubo, N. Uchiyama, Trajectory generation of rotary cranes based on a* algorithm and time-optimization for obstacle avoidance and load-sway suppression 94 103025. doi:10.1016/j.mechatronics.2023.103025. URLhttps://www.sciencedirect.com/ science/article/pii/S0957415823000818
-
[11]
H. Bao, J. An, M. Zhou, Q. Kang, A data-driven mpc algo- rithm for bridge cranes, in: 2020 International Conference on Advanced Mechatronic Systems (ICAMechS), IEEE, 2020, pp. 328–332. doi:10.1007/s11071-024-10384-6
-
[12]
G.-H. Kim, M. Yoon, J. Y . Jeon, K.-S. Hong, Data- driven modeling and adaptive predictive anti-swing con- trol of overhead cranes, International Journal of Con- trol, Automation and Systems 20 (8) (2022) 2712–2723. doi:10.1007/s12555-022-0025-8
-
[13]
J. Chen, R. Shi, H. Ouyang, Data-driven discrete learning sliding mode control for overhead cranes suffering from disturbances, Nonlinear Dynamics 113 (4) (2025) 3357– 3372
2025
-
[14]
J. C. Willems, P. Rapisarda, I. Markovsky, B. L. De Moor, A note on persistency of excitation, Systems & Control Letters 54 (4) (2005) 325–329. doi:https://doi.org/10.1016/j.sysconle.2004.09.003. URLhttps://www.sciencedirect.com/ science/article/pii/S0167691104001434
-
[15]
Berberich, F
J. Berberich, F. Allgöwer, A trajectory-based framework for data-driven system analysis and control, in: 2020 Eu- ropean Control Conference (ECC), IEEE, 2020, pp. 1365–
2020
-
[16]
doi:10.23919/ECC51009.2020.9143608
work page internal anchor Pith review Pith/arXiv arXiv doi:10.23919/ecc51009.2020.9143608 2020
-
[17]
J. Berberich, J. Köhler, M. A. Müller, F. Allgöwer, Data-driven model predictive control with stabil- ity and robustness guarantees 66 (4) 1702–1717. doi:10.1109/TAC.2020.3000182. URLhttps://ieeexplore.ieee.org/ document/9109670/?arnumber=9109670
-
[18]
J. Coulson, J. Lygeros, F. Dörfler, Data-enabled predictive control: In the shallows of the DeePC, in: 2019 18th European Control Conference (ECC), pp. 307–312. doi:10.23919/ECC.2019.8795639. URLhttps://ieeexplore.ieee.org/ document/8795639
-
[19]
A. Carron, E. Arcari, M. Wermelinger, L. Hewing, M. Hutter, M. N. Zeilinger, Data-driven model predictive control for trajectory tracking with a robotic arm 4 (4) 3758–3765. doi:10.1109/LRA.2019.2929987. URLhttps://ieeexplore.ieee.org/ abstract/document/8768048
-
[20]
E. Elokda, J. Coulson, P. N. Beuchat, J. Lygeros, F. Dör- fler, Data-enabled predictive control for quadcopters 31 (18) 8916–8936. doi:10.1002/rnc.5686. URLhttps://onlinelibrary.wiley.com/ doi/abs/10.1002/rnc.5686
-
[21]
I. Markovsky, L. Huang, F. Dörfler, Data-driven control based on the behavioral approach: From the- ory to applications in power systems 43 (5) 28–68. doi:10.1109/MCS.2023.3291638. URLhttps://ieeexplore.ieee.org/ document/10266847/
-
[22]
I. Markovsky, F. Dörfler, Data-driven dynamic interpolation and approximation 135 110008. doi:10.1016/j.automatica.2021.110008
-
[23]
I. Markovsky, F. Dörfler, Behavioral systems theory in data-driven analysis, signal processing, and con- trol, Annual Reviews in Control 52 (2021) 42–64. doi:https://doi.org/10.1016/j.arcontrol.2021.09.005
-
[24]
I. Markovsky, F. Dorfler, Identifiability in the behavioral setting 68 (3) 1667–1677. doi:10.1109/TAC.2022.3209954. URLhttps://ieeexplore.ieee.org/ document/9904308/
-
[25]
Coulson, J
J. Coulson, J. Lygeros, F. Dörfler, Distributionally robust chance constrained data-enabled predictive control, IEEE Transactions on Automatic Control 67 (7) (2022) 3289–
2022
-
[26]
doi:10.1109/TAC.2021.3097706
-
[27]
F. Dorfler, J. Coulson, I. Markovsky, Bridging di- rect and indirect data-driven control formulations via regularizations and relaxations 68 (2) 883–897. doi:10.1109/TAC.2022.3148374. URLhttps://ieeexplore.ieee.org/ document/9705109/
-
[28]
J. C. Willems, From time series to linear sys- tem—part i. finite dimensional linear time invari- ant systems, Automatica 22 (5) (1986) 561–580. doi:https://doi.org/10.1016/0005-1098(86)90066-X. URLhttps://www.sciencedirect.com/ science/article/pii/000510988690066X
-
[29]
A. Padoan, J. Coulson, H. J. Van Waarde, J. Lygeros, F. Dörfler, Behavioral uncertainty quantification for data- driven control, in: 2022 IEEE 61st Conference on De- cision and Control (CDC), IEEE, 2022, pp. 4726–4731. doi:10.1109/CDC51059.2022.9993002. 14
-
[30]
Markovsky, J
I. Markovsky, J. C. Willems, S. Van Huffel, B. De Moor, Exact and approximate modeling of linear systems: A be- havioral approach, SIAM, 2006
2006
-
[31]
H. J. van Waarde, C. De Persis, M. K. Camli- bel, P. Tesi, Willems’ fundamental lemma for state- space systems and its extension to multiple datasets, IEEE Control Systems Letters 4 (3) (2020) 602–607. doi:10.1109/LCSYS.2020.2986991
-
[32]
J. L. Proctor, S. L. Brunton, J. N. Kutz, Generalizing koopman theory to allow for inputs and control, SIAM Journal on Applied Dynamical Systems 17 (1) (2018) 909–930. doi:https://doi.org/10.1137/16M1062296
-
[33]
Amini, C
A. Amini, C. Zheng, Q. Sun, N. Motee, Carleman linearization of nonlinear systems and its finite-section approximations, Discrete and Continuous Dynamical Systems-B 30 (2) (2025) 577–603
2025
-
[34]
M. Alsalti, V . G. Lopez, J. Berberich, F. Allgöwer, M. A. Müller, Data-based control of feedback linearizable sys- tems, IEEE Transactions on Automatic Control 68 (11) (2023) 7014–7021. doi:10.1109/TAC.2023.3249289
-
[35]
Z. Yuan, J. Cortés, Data-driven optimal control of bilinear systems, IEEE Control Systems Letters 6 (2022) 2479–
2022
-
[36]
doi:10.1109/LCSYS.2022.3164983
-
[37]
M. Lazar, From product hilbert spaces to the generalized koopman operator and the nonlinear fundamental lemma, preprint (2025). arXiv:arXiv:2508.07494
-
[38]
C. Eckart, G. Young, The approximation of one matrix by another of lower rank 1 (3) 211–218. doi:10.1007/BF02288367. URLhttps://doi.org/10.1007/BF02288367
-
[39]
ApS, Mosek optimization toolbox for matlab, User’s Guide and Reference Manual, Version 4 (1) (2019) 116
M. ApS, Mosek optimization toolbox for matlab, User’s Guide and Reference Manual, Version 4 (1) (2019) 116
2019
-
[40]
Strang, et al., Linear algebra and learning from data, V ol
G. Strang, et al., Linear algebra and learning from data, V ol. 4, Wellesley-Cambridge Press Cambridge, 2019
2019
-
[41]
I. Markovsky, P. Rapisarda, Data-driven sim- ulation and control 81 (12) 1946–1959. doi:10.1080/00207170801942170. URLhttps://doi.org/10.1080/ 00207170801942170
-
[42]
A. Farrage, N. A. Amir, H. Takahashi, S. Sasai, H. Sakurai, M. Okubo, N. Uchiyama, Optimal tra- jectory generation for horizontal boom motion of ro- tary cranes considering load-rotation suppression, in: 2025 3rd International Conference on Mechatronics, Control and Robotics (ICMCR), 2025, pp. 113–117. doi:10.1109/ICMCR64890.2025.10963324
-
[43]
M. Burkhardt, A. Gienger, O. Sawodny, Optimization- based multipoint trajectory planning along straight lines for tower cranes, IEEE Transactions on Con- trol Systems Technology 32 (1) (2024) 290–297. doi:10.1109/TCST.2023.3308762
-
[44]
H. J. Sussmann, V . Jurdjevic, Controllability of non- linear systems 12 (1) 95–116. doi:10.1016/0022- 0396(72)90007-1. URLhttps://www.sciencedirect.com/ science/article/pii/0022039672900071 15
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.