Self-Evolving Cognitive Framework via Causal World Modeling for Embodied Scientific Intelligence
Pith reviewed 2026-06-26 11:03 UTC · model grok-4.3
The pith
Embodied agents evolve their cognition by continually revising causal world models through discovery, interventions, and counterfactual reasoning.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
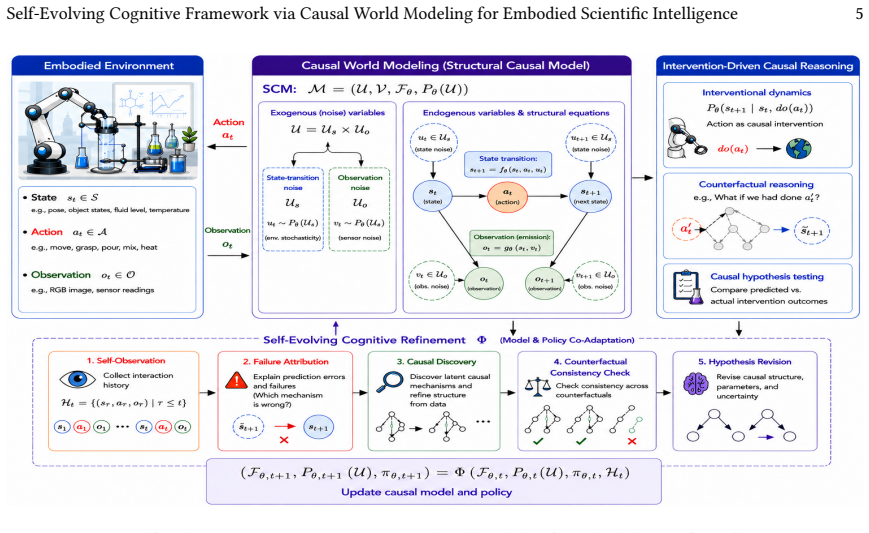
The proposed self-evolving cognitive framework integrates causal world modeling, intervention-driven causal reasoning, and continual cognitive refinement. The framework continuously revises and expands its internal causal world model through causal discovery, intervention-driven feedback, and counterfactual reasoning, supporting continual cognitive refinement and enabling cognition itself to evolve over time. Embodied interaction is reinterpreted as an epistemic process for causal hypothesis generation, intervention-driven experimentation, and continual knowledge acquisition, providing a foundation for a transition from predictive intelligence to epistemic intelligence.
What carries the argument
The self-evolving cognitive framework that integrates causal world modeling, intervention-driven causal reasoning, and continual cognitive refinement to revise internal causal representations.
If this is right
- Embodied interaction functions as hypothesis generation and experimentation rather than trajectory optimization alone.
- Systems achieve better generalization under distribution shifts through causal rather than predictive modeling.
- An intervention-driven causal-epistemic benchmarking paradigm evaluates progress in self-evolving embodied scientific intelligence.
- Cognition emerges and improves through repeated cycles of causal model construction, revision, and refinement via environment interaction.
Where Pith is reading between the lines
- The framework could extend to active learning settings where agents select interventions to maximize causal information gain.
- In robotics applications, this might enable adaptation to novel objects or tasks by updating causal beliefs rather than retraining predictors.
- Simulated environments with controlled noise levels could test whether the refinement loop remains stable when observations are incomplete.
- This view connects to questions in cognitive science about how humans form and revise causal theories through play and experimentation.
Load-bearing premise
Causal discovery and intervention-driven feedback can be integrated into embodied systems to produce genuine continual refinement despite real-world noise and partial observability.
What would settle it
An experiment in which an embodied agent executes an intervention, receives noisy or partial feedback, and fails to revise its causal model to correctly predict subsequent outcomes.
Figures
read the original abstract
Current embodied world models are primarily optimized for predictive objectives, limiting their ability to generalize under distribution shifts and reason systematically about unseen situations and hypothetical interventions. We argue that embodied intelligence should move beyond predictive world modeling toward self-evolving cognitive systems that continually construct and refine internal causal representations through interaction with the environment. To this end, we propose a self-evolving cognitive framework via causal world modeling for embodied scientific intelligence, which integrates three complementary components: causal world modeling, intervention-driven causal reasoning, and continual cognitive refinement. The proposed framework continuously revises and expands its internal causal world model through causal discovery, intervention-driven feedback, and counterfactual reasoning, supporting continual cognitive refinement and enabling cognition itself to evolve over time. Furthermore, we reinterpret embodied interaction not merely as a means of trajectory optimization, but as an epistemic process for causal hypothesis generation, intervention-driven experimentation, and continual knowledge acquisition. This work provides a conceptual and theoretical foundation for a transition from predictive intelligence toward epistemic intelligence, in which intelligence emerges through the continual construction, revision, and refinement of causal world models via interaction with the environment. Accordingly, an intervention-driven causal-epistemic benchmarking paradigm is suggested for evaluating self-evolving embodied scientific intelligence.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims that embodied world models are limited by predictive objectives and proposes a self-evolving cognitive framework for embodied scientific intelligence. This framework integrates causal world modeling, intervention-driven causal reasoning, and continual cognitive refinement to enable continuous revision and expansion of internal causal representations via causal discovery, intervention-driven feedback, and counterfactual reasoning. Embodied interaction is reinterpreted as an epistemic process for hypothesis generation and knowledge acquisition, with a suggested intervention-driven causal-epistemic benchmarking paradigm for evaluation.
Significance. If operationalized, the framework could shift embodied AI from predictive to epistemic intelligence, enabling systems that actively construct, test, and refine causal models through interaction. This has potential implications for scientific discovery in robotics and autonomous agents by grounding cognition in causal understanding rather than trajectory optimization.
major comments (2)
- [Abstract] Abstract: The central claim that the framework 'continuously revises and expands its internal causal world model through causal discovery, intervention-driven feedback, and counterfactual reasoning' is stated without any formal update rules, pseudocode, or integration mechanisms, rendering the assertion that 'cognition itself [can] evolve over time' an ungrounded assertion rather than a derivable property.
- [The proposed framework (main text description of components)] The proposed framework description: No mechanisms are specified for integrating the three components under partial observability, sensor noise, or non-stationary dynamics, which are load-bearing for the feasibility of continual refinement in embodied settings.
minor comments (2)
- The abstract and introduction would benefit from explicit comparison to related work in causal reinforcement learning and active learning to clarify novelty.
- Terminology such as 'epistemic intelligence' and 'self-evolving' is used without precise definitions, which could be clarified for readers.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive feedback. The comments correctly identify that the manuscript is a high-level conceptual proposal rather than an implemented system with executable mechanisms. We address each point below and indicate planned revisions.
read point-by-point responses
-
Referee: [Abstract] Abstract: The central claim that the framework 'continuously revises and expands its internal causal world model through causal discovery, intervention-driven feedback, and counterfactual reasoning' is stated without any formal update rules, pseudocode, or integration mechanisms, rendering the assertion that 'cognition itself [can] evolve over time' an ungrounded assertion rather than a derivable property.
Authors: We agree that the manuscript is a theoretical framework paper and does not supply formal update rules or pseudocode. The central claim is presented as a high-level description of the intended epistemic process rather than a derivable algorithmic property. In the revision we will add an explicit limitations paragraph in the abstract and a new subsection in the framework description that outlines candidate formalization routes (e.g., iterative causal discovery operators and intervention feedback loops) drawn from existing causal inference literature, while clarifying that concrete pseudocode belongs to future empirical instantiations. revision: partial
-
Referee: [The proposed framework (main text description of components)] The proposed framework description: No mechanisms are specified for integrating the three components under partial observability, sensor noise, or non-stationary dynamics, which are load-bearing for the feasibility of continual refinement in embodied settings.
Authors: The comment is accurate: the current text does not detail integration mechanisms under partial observability, sensor noise, or non-stationary dynamics. Because the manuscript is positioned as a conceptual foundation, these engineering considerations were left for subsequent work. We will revise the framework section to include a dedicated paragraph sketching how each component can be realized under those conditions (e.g., robust causal discovery under noisy observations and adaptive intervention scheduling for non-stationarity), referencing relevant literature on causal inference in uncertain environments. revision: yes
Circularity Check
No circularity: purely conceptual proposal with no equations, derivations, or fitted predictions
full rationale
The paper contains no equations, parameter fittings, or formal derivations. Its central claims consist of definitional statements about a proposed framework that integrates named components (causal world modeling, intervention-driven reasoning, continual refinement) via the same processes it describes. Because there are no load-bearing mathematical steps, no self-citation chains invoking uniqueness theorems, and no 'predictions' that reduce to fitted inputs, the text does not exhibit any of the enumerated circularity patterns. The framework is presented as a conceptual foundation rather than a derived result, making the derivation chain self-contained by absence of any reduction to inspect.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Predictive objectives inherently limit generalization under distribution shifts in embodied settings
- domain assumption Causal representations can be continually constructed and refined through interaction
invented entities (1)
-
self-evolving cognitive framework via causal world modeling
no independent evidence
Reference graph
Works this paper leans on
-
[1]
Konstantinos Bousmalis, Giulia Vezzani, et al . 2023. RoboCat: A Self-Improving Foundation Agent for Robotic Manipulation.arXiv preprint arXiv:2306.11706(2023). doi:10.48550/arXiv.2306.11706
-
[2]
Anthony Brohan et al. 2023. RT-2: Vision-Language-Action Models Transfer Web Knowledge to Robotic Control.arXiv preprint arXiv:2307.15818 (2023). doi:10.48550/arXiv.2307.15818
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv.2307.15818 2023
-
[3]
Anthony Brohan, Noah Brown, et al. 2022. RT-1: Robotics Transformer for Real-World Control at Scale.arXiv preprint arXiv:2212.06817(2022)
Pith/arXiv arXiv 2022
-
[4]
Lars Buesing, Theophane Weber, et al. 2019. Woulda, Coulda, Shoulda: Counterfactually-Guided Policy Search.arXiv preprint arXiv:1811.06272 (2019). doi:10.48550/arXiv.1811.06272
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv.1811.06272 2019
-
[5]
Jingtao Ding, Yunke Zhang, et al. 2025. Understanding World or Predicting Future? A Comprehensive Survey of World Models.Comput. Surveys58, 3 (2025). doi:10.1145/3746449
-
[6]
Danny Driess, Fei Xia, et al. 2023. PaLM-E: An Embodied Multimodal Language Model.arXiv preprint arXiv:2303.03378(2023). doi:10.48550/arXiv. 2303.03378
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv 2023
-
[7]
Richard E. Fikes and Nils J. Nilsson. 1971. STRIPS: A New Approach to the Application of Theorem Proving to Problem Solving.Artificial Intelligence 2, 3–4 (1971), 189–208. doi:10.1016/0004-3702(71)90010-5
-
[8]
David Ha and Jürgen Schmidhuber. 2018. World Models.arXiv preprint arXiv:1803.10122(2018). doi:10.48550/arXiv.1803.10122
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv.1803.10122 2018
-
[9]
Danijar Hafner et al. 2023. Mastering Diverse Control Tasks through World Models.arXiv preprint arXiv:2301.04104(2023). doi:10.48550/arXiv.2301. 04104
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv.2301 2023
-
[10]
Danijar Hafner, Timothy Lillicrap, Jimmy Ba, and Mohammad Norouzi. 2019. Learning Latent Dynamics for Planning from Pixels.Proceedings of the 36th International Conference on Machine Learning97 (2019)
2019
-
[11]
Danijar Hafner, Timothy Lillicrap, Jimmy Ba, and Mohammad Norouzi. 2020. Dream to Control: Learning Behaviors by Latent Imagination. International Conference on Learning Representations(2020)
2020
-
[12]
Tom He, Jasmina Gajcin, and Ivana Dusparic. 2022. Causal Counterfactuals for Improving the Robustness of Reinforcement Learning.arXiv preprint arXiv:2211.05551(2022). doi:10.48550/arXiv.2211.05551
-
[13]
Ruofei Ju, Xinrui Wang, et al. 2026. EmbodiSkill: Skill-Aware Reflection for Self-Evolving Embodied Agents.arXiv preprint arXiv:2605.10332(2026)
Pith/arXiv arXiv 2026
-
[14]
Leslie Pack Kaelbling and Tomas Lozano-Perez. 2011. Hierarchical Task and Motion Planning in the Now.IEEE International Conference on Robotics and Automation(2011)
2011
-
[15]
Moo Jin Kim et al. 2024. OpenVLA: An Open-Source Vision-Language-Action Model.arXiv preprint arXiv:2406.09246(2024)
Pith/arXiv arXiv 2024
-
[16]
Matthias De Lange, Rahaf Aljundi, et al. 2021. A Continual Learning Survey: Defying Forgetting in Classification Tasks.IEEE Transactions on Pattern Analysis and Machine Intelligence44, 7 (2021), 3366–3385. doi:10.1109/TPAMI.2021.3057446
-
[17]
Part, Christopher Kanan, and Stefan Wermter
German I. Parisi, Ronald Kemker, Jose L. Part, Christopher Kanan, and Stefan Wermter. 2019. Continual Lifelong Learning with Neural Networks: A Review.Neural Networks113 (2019), 54–71. doi:10.1016/j.neunet.2019.01.012
-
[18]
2009.Causality: Models, Reasoning, and Inference(2nd ed.)
Judea Pearl. 2009.Causality: Models, Reasoning, and Inference(2nd ed.). Cambridge University Press. doi:10.1017/CBO9780511803161
-
[19]
2017.Elements of Causal Inference: Foundations and Learning Algorithms
Jonas Peters, Dominik Janzing, and BernhardSchölkopf. 2017.Elements of Causal Inference: Foundations and Learning Algorithms. MIT Press
2017
-
[20]
Scott Reed et al. 2022. A Generalist Agent.arXiv preprint arXiv:2205.06175(2022). doi:10.48550/arXiv.2205.06175
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv.2205.06175 2022
-
[21]
Schölkopfand Locatello Schölkopf, Francesco, Bauer, et al . 2021. Toward Causal Representation Learning.Proc. IEEE109, 5 (2021), 612–634. doi:10.1109/JPROC.2021.3058954
-
[22]
Julian Schrittwieser, Ioannis Antonoglou, et al. 2020. Mastering Atari, Go, Chess and Shogi by Planning with a Learned Model.Nature588, 7839 (2020), 604–609. doi:10.1038/s41586-020-03051-4
work page internal anchor Pith review doi:10.1038/s41586-020-03051-4 2020
-
[23]
Zhongwei Yu, Jingqing Ruan, and Dengpeng Xing. 2023. Explainable Reinforcement Learning via a Causal World Model.arXiv preprint arXiv:2305.02749(2023). doi:10.48550/arXiv.2305.02749
-
[24]
Yan Zeng, Ruichu Cai, Fuchun Sun, Libo Huang, and Zhifeng Hao. 2025. A Survey on Causal Reinforcement Learning.IEEE Transactions on Neural Networks and Learning Systems36 (2025), 5942–5962. doi:10.1109/TNNLS.2024.3403001 Manuscript submitted to ACM
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.