Data-driven approximation of regions of attraction via an LP-based selection of PWA Lyapunov functions
Pith reviewed 2026-05-21 07:39 UTC · model grok-4.3
The pith
A linear program synthesizes a continuous piecewise affine Lyapunov function to certify a region of attraction consistent with pointwise data and Lipschitz bounds for unknown nonlinear systems.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
By constructing a polyhedral uncertainty set encompassing all admissible vector fields from point-wise data and Lipschitz constants, the method formulates a linear program to compute a continuous piecewise affine Lyapunov candidate that satisfies a robust decrease condition across the entire set, thereby certifying a data-consistent region of attraction.
What carries the argument
The linear program that optimizes the parameters of a continuous piecewise affine Lyapunov function subject to robust decrease inequalities over the polyhedral uncertainty set of dynamics.
If this is right
- The certified region is guaranteed to be invariant and attracting for any dynamics inside the uncertainty set.
- Stability certificates can be extracted directly from experimental data without assuming a specific model form.
- The approach works with sparse data points provided the Lipschitz bounds are supplied.
- Numerical examples demonstrate extraction of certified regions even when information is limited.
Where Pith is reading between the lines
- Iteratively adding more data points could refine the uncertainty set and enlarge the certified region over time.
- The same LP framework might be extended to design feedback laws that maximize the size of the certified region.
- Computational cost grows with the number of facets in the polytope, pointing to a need for adaptive partitioning in higher dimensions.
Load-bearing premise
The polyhedral uncertainty set constructed from the point-wise evaluations and known Lipschitz bounds is assumed to contain every vector field consistent with the data.
What would settle it
Discovery of a vector field that agrees with the data at the evaluation points, respects the Lipschitz bound, but has at least one trajectory starting inside the certified region that diverges from the origin.
Figures




read the original abstract
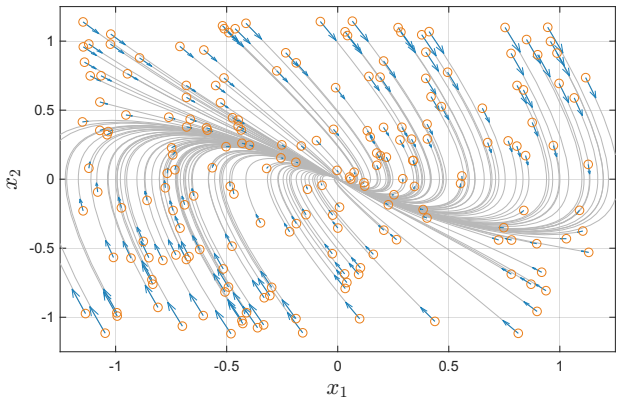
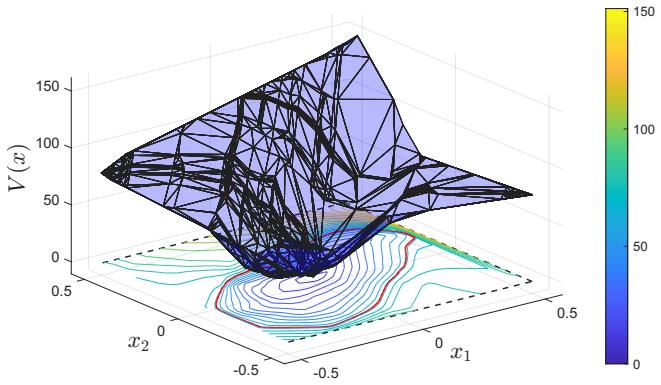
This paper presents a method to approximate regions of attraction of unknown nonlinear dynamical systems from data. Assuming point-wise evaluations of the vector field and known Lipschitz bounds, a polyhedral uncertainty set of admissible dynamics is constructed. This uncertainty description enables the synthesis of a continuous piece-wise affine Lyapunov candidate via a linear program, enforcing a robust decrease condition for all admissible vector fields. The approach allows certification of a region of attraction consistent with the available data. Numerical examples illustrate the effectiveness of the proposed method in extracting certified regions of attraction from sparse data.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents a method to approximate regions of attraction of unknown nonlinear dynamical systems from data. Assuming point-wise evaluations of the vector field and known Lipschitz bounds, a polyhedral uncertainty set of admissible dynamics is constructed. This uncertainty description enables the synthesis of a continuous piece-wise affine Lyapunov candidate via a linear program, enforcing a robust decrease condition for all admissible vector fields. The approach allows certification of a region of attraction consistent with the available data. Numerical examples illustrate the effectiveness of the proposed method in extracting certified regions of attraction from sparse data.
Significance. If the central claims hold, the work provides a computationally tractable LP-based route to certified RoA estimates from limited data and Lipschitz information, which could be useful for verification in data-driven control. The combination of polyhedral uncertainty modeling with continuous PWA Lyapunov functions is a reasonable technical direction, though its practical impact depends on resolving the inclusion and robustness questions below.
major comments (2)
- [Section 3.2] Section 3.2: The polyhedral uncertainty set is constructed from point-wise evaluations plus Lipschitz bounds, but the manuscript does not demonstrate that the facet inequalities exactly contain every vector field consistent with the data and the Lipschitz condition. Without this inclusion guarantee, the robust decrease condition enforced by the LP cannot be guaranteed to hold for all admissible dynamics, directly undermining the certification claim.
- [Section 4] Section 4: The LP formulation for selecting the PWA Lyapunov function is described at a high level, but it is not shown how the robust decrease condition over the entire polyhedral set is reduced to a finite number of linear constraints (e.g., via vertex or facet enumeration). This step is load-bearing for the claim that the synthesized function certifies a valid RoA.
minor comments (2)
- [Numerical examples] The choice of state-space partition for the PWA function is listed as a free parameter; a brief discussion of how it is selected in the numerical examples would improve reproducibility.
- [Figures] Figure captions could more explicitly indicate which trajectories or sets correspond to the certified RoA versus the uncertainty bounds.
Simulated Author's Rebuttal
We thank the referee for the thorough review and valuable comments on our manuscript. We believe the suggested clarifications will improve the rigor of the presentation. We address each major comment below and plan to incorporate the necessary revisions.
read point-by-point responses
-
Referee: Section 3.2: The polyhedral uncertainty set is constructed from point-wise evaluations plus Lipschitz bounds, but the manuscript does not demonstrate that the facet inequalities exactly contain every vector field consistent with the data and the Lipschitz condition. Without this inclusion guarantee, the robust decrease condition enforced by the LP cannot be guaranteed to hold for all admissible dynamics, directly undermining the certification claim.
Authors: We agree with the referee that an explicit demonstration of the inclusion property is essential for the certification claim. The current manuscript constructs the polyhedral set using facet inequalities derived from the Lipschitz condition at each data point, but we did not include a formal proof. In the revised manuscript, we will add a detailed proof in Section 3.2 showing that any vector field satisfying the pointwise data and the global Lipschitz bound must satisfy all the facet inequalities of our uncertainty set. This proof will be based on the triangle inequality for the Lipschitz constant and the fact that the facets are chosen as supporting hyperplanes to the possible range at each point. With this addition, the robust decrease condition will be guaranteed to apply to all admissible dynamics. revision: yes
-
Referee: Section 4: The LP formulation for selecting the PWA Lyapunov function is described at a high level, but it is not shown how the robust decrease condition over the entire polyhedral set is reduced to a finite number of linear constraints (e.g., via vertex or facet enumeration). This step is load-bearing for the claim that the synthesized function certifies a valid RoA.
Authors: The referee correctly identifies that the reduction to finite constraints is critical. In the manuscript, we mention that the robust condition is enforced over the polyhedral uncertainty set, but the details of how this is achieved via vertex enumeration are not fully elaborated. We will revise Section 4 to include the complete derivation: for each affine region of the PWA Lyapunov function, the decrease condition must hold for all vectors in the polytope. Since the set is polyhedral and compact, the maximum violation occurs at a vertex. Therefore, it suffices to impose the linear decrease inequalities at each vertex of the uncertainty polytope. We will add this explanation along with the corresponding finite set of constraints that are fed into the LP solver. This will make the load-bearing step explicit. revision: yes
Circularity Check
No circularity: derivation uses independent data and Lipschitz bounds to construct verifiable uncertainty set
full rationale
The paper's chain proceeds from externally supplied point-wise vector-field evaluations plus independently known Lipschitz constants to a polyhedral outer approximation of admissible dynamics, followed by an LP that selects a continuous PWA Lyapunov function enforcing a robust decrease condition over that set. None of the load-bearing steps reduces by definition or by self-citation to a quantity fitted to the final certified region; the inputs (data points and Lipschitz bounds) are not derived from the output RoA or from any prior result by the same authors that would close a self-referential loop. The method is therefore self-contained against external benchmarks and receives the default non-circularity finding.
Axiom & Free-Parameter Ledger
free parameters (1)
- State-space partition for PWA function
axioms (1)
- domain assumption Point-wise vector field evaluations are exact and the supplied Lipschitz bounds are valid over the considered domain.
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
polyhedral uncertainty set ... LP ... robust decrease condition for all admissible vector fields ... certified region of attraction
-
IndisputableMonolith/Foundation/AbsoluteFloorClosure.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
PWA Lyapunov candidate via linear program ... vertex-based counterpart (16*)
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
The general problem of the stability of motion,
A. M. Lyapunov, “The general problem of the stability of motion,”Int. J. Control, vol. 55, no. 3, pp. 531–534, 1992
work page 1992
-
[2]
¨Uber die Lage der Integralkurven gew¨ ohnlicher Differentialgleichungen,
M. Nagumo, “ ¨Uber die Lage der Integralkurven gew¨ ohnlicher Differentialgleichungen,” 1942
work page 1942
-
[3]
Learning stable deep dynamics models,
J. Z. Kolter and G. Manek, “Learning stable deep dynamics models,”Adv. Neural Inf. Process. Syst., 2019
work page 2019
-
[4]
Actor–Critic Physics-Informed Neural Lyapunov Control,
J. Wang and M. Fazlyab, “Actor–Critic Physics-Informed Neural Lyapunov Control,”IEEE Control Syst. Lett., vol. 8, pp. 1751–1756, 2024
work page 2024
-
[5]
Computing Lyapunov functions using deep neural networks,
L. Gr¨ une, “Computing Lyapunov functions using deep neural networks,”J. Comput. Dyn., vol. 8, no. 2, pp. 131–152, 2021
work page 2021
-
[6]
Estimation of constraint admissible invariant set with neural Lyapunov func- tion,
D. Kim and H. J. Kim, “Estimation of constraint admissible invariant set with neural Lyapunov func- tion,” inProc. IEEE CDC, (Milan, Italy), pp. 5032–5039, 2024
work page 2024
-
[7]
Data-driven system analysis of nonlinear systems using polynomial approx- imation,
T. Martin and F. Allg¨ ower, “Data-driven system analysis of nonlinear systems using polynomial approx- imation,”IEEE Trans. Autom. Control, vol. 69, no. 7, pp. 4261–4274, 2024
work page 2024
-
[8]
Data-driven superstabilizing control under quadratically-bounded errors-in-variables noise,
J. Miller, T. Dai, and M. Sznaier, “Data-driven superstabilizing control under quadratically-bounded errors-in-variables noise,”IEEE Control Syst. Lett., vol. 8, pp. 1655–1660, 2024. 14
work page 2024
-
[9]
J. J. Bramburger and G. Fantuzzi, “Auxiliary functions as Koopman observables: Data-driven analysis of dynamical systems via polynomial optimization,”J. Nonlinear Sci., vol. 34, Feb. 2024
work page 2024
-
[10]
Data-driven safe control of discrete-time non-linear systems,
J. Zheng, J. Miller, and M. Sznaier, “Data-driven safe control of discrete-time non-linear systems,”IEEE Control Syst. Lett., vol. 8, pp. 1553–1558, 2024
work page 2024
-
[11]
Stability of dynamical systems: A constructive approach,
R. Brayton and C. Tong, “Stability of dynamical systems: A constructive approach,”IEEE Trans. Circuits Syst., vol. 26, no. 4, pp. 224–234, 1979
work page 1979
-
[12]
Constructive stability and asymptotic stability of dynamical systems,
R. Brayton and C. Tong, “Constructive stability and asymptotic stability of dynamical systems,”IEEE Trans. Circuits Syst., vol. 27, no. 11, pp. 1121–1130, 1980
work page 1980
-
[13]
Computer generated Lyapunov functions for a class of nonlinear systems,
Y. Ohta, H. Imanishi, L. Gong, and H. Haneda, “Computer generated Lyapunov functions for a class of nonlinear systems,”IEEE Trans. Circuits Syst. I, vol. 40, no. 5, pp. 343–354, 1993
work page 1993
-
[14]
Vector norms as Lyapunov functions for linear systems,
H. Kiendl, J. Adamy, and P. Stelzner, “Vector norms as Lyapunov functions for linear systems,”IEEE Trans. Autom. Control, vol. 37, no. 6, pp. 839–842, 1992
work page 1992
-
[15]
A. Hmamed, H. Kiendl, J. Adamy, and P. Stelzner, “Comments on ”Vector norms as Lyapunov functions for linear systems” [with reply],”IEEE Trans. Autom. Control, vol. 39, no. 12, pp. 2522–2523, 1994
work page 1994
-
[16]
K. Loskot, A. Polanski, and R. Rudnicki, “Further comments on ”Vector norms as Lyapunov functions for linear systems”,”IEEE Trans. Autom. Control, vol. 43, no. 2, pp. 289–291, 1998
work page 1998
-
[17]
Stability margin evaluation for uncertain linear systems,
C. Gong and S. Thompson, “Stability margin evaluation for uncertain linear systems,”IEEE Trans. Autom. Control, vol. 39, no. 3, pp. 548–550, 1994
work page 1994
-
[18]
J.-H. Su, “Comments on ”Stability margin evaluation for uncertain linear systems”,”IEEE Trans. Autom. Control, vol. 39, no. 12, pp. 2523–2524, 1994
work page 1994
-
[19]
On reduction of differential inclusions and Lyapunov stability,
R. Kamalapurkar, W. E. Dixon, and A. R. Teel, “On reduction of differential inclusions and Lyapunov stability,”ESAIM Control Op. Ca. Va., vol. 26, p. 24, 2020
work page 2020
-
[20]
Robust control barrier functions with uncertainty estimation,
E. Da¸ s, S. X. Wei, and J. W. Burdick, “Robust control barrier functions with uncertainty estimation,” arXiv:2304.08538, 2023
-
[21]
A parametrization of piecewise linear Lyapunov functions via linear programming,
P. Julian, J. Guivant, and A. Desages, “A parametrization of piecewise linear Lyapunov functions via linear programming,”Int. J. Control, vol. 72, no. 7-8, pp. 702–715, 1999
work page 1999
-
[22]
Robustly learning regions of attraction from fixed data,
M. Tacchi, Y. Lian, and C. N. Jones, “Robustly learning regions of attraction from fixed data,”IEEE Trans. Autom. Control, vol. 70, no. 3, pp. 1576–1591, 2025
work page 2025
-
[23]
Sequentially learning regions of attraction from data,
O. Khattabi, M. Tacchi, and S. Olaru, “Sequentially learning regions of attraction from data,” inProc. IEEE Mediterr. Control Autom., pp. 589–594, 2025
work page 2025
-
[24]
M. Herceg, M. Kvasnica, C. N. Jones, and M. Morari, “Multi-Parametric Toolbox 3.0,” inProc. Eur. Control Conf., pp. 502–510, 2013
work page 2013
-
[25]
YALMIP: A toolbox for modeling and optimization in MATLAB,
J. L¨ ofberg, “YALMIP: A toolbox for modeling and optimization in MATLAB,” inProc. CACSD, (Taipei, Taiwan), 2004
work page 2004
-
[26]
The MOSEK optimization toolbox for MATLAB manual. Version 11.1.10.,
M. ApS, “The MOSEK optimization toolbox for MATLAB manual. Version 11.1.10.,” 2026. 15
work page 2026
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.