RadProPoser: Probabilistic Radar Tensor Human Pose Estimation That Knows Its Limits
Pith reviewed 2026-05-21 22:48 UTC · model grok-4.3
The pith
RadProPoser estimates 3D human poses from radar tensors with per-joint aleatoric uncertainties that calibrate to low error.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
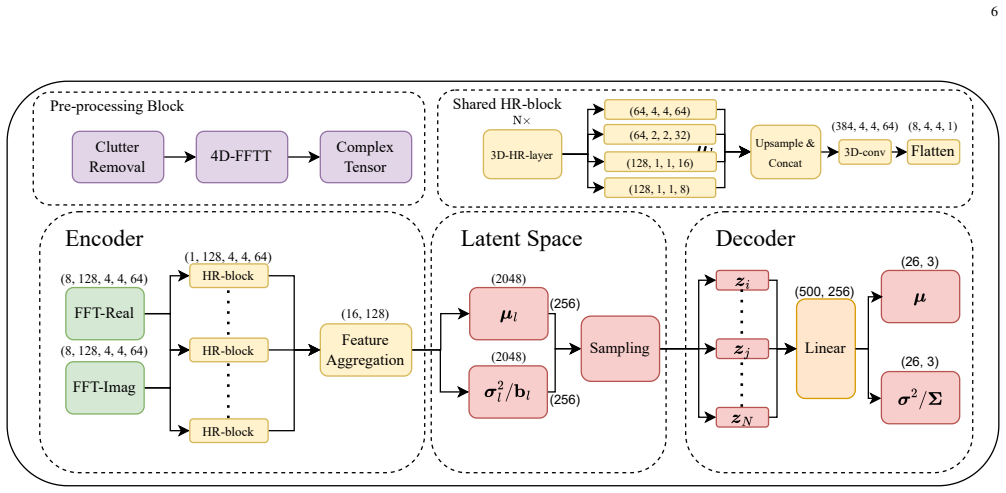
RadProPoser demonstrates that a variational encoder-decoder with spectral attention on radar tensors can jointly predict three-dimensional body joint positions and per-joint aleatoric uncertainties, modeled through learnable Gaussian and Laplace distributions, achieving 6.425 cm MPJPE on a new motion-capture benchmark and calibrated total uncertainty with 0.027 expected calibration error after isotonic recalibration, while extending to dual-radar setups at 5.042 cm MPJPE.
What carries the argument
Variational encoder-decoder with spectral attention fusing real and imaginary radar components across temporal frames; this mechanism enables simultaneous pose regression and uncertainty estimation from noisy radar data.
If this is right
- The approach extends to multi-radar configurations via input concatenation, yielding 5.042 cm MPJPE on the HuPR benchmark with dual orthogonal radars.
- Per-joint uncertainty outputs allow the model to indicate reliability, supporting deployment in applications where overconfident errors would be costly.
- The real-time performance at 89 FPS on an RTX 3090 exceeds the 15 Hz radar rate, enabling continuous tracking.
- Isotonic recalibration effectively calibrates the aggregated uncertainties without retraining the core model.
Where Pith is reading between the lines
- Uncertainty estimates could guide sensor fusion with complementary modalities like depth cameras to improve overall robustness in challenging conditions.
- The per-joint modeling might reveal which body parts are harder to track with radar, informing hardware design or preprocessing steps.
- Such frameworks could be adapted for other privacy-sensitive sensing like mmWave in smart homes to quantify tracking confidence.
Load-bearing premise
The optical motion-capture ground truth in the new benchmark dataset accurately represents the true poses and allows the model to learn aleatoric uncertainties that reflect real radar noise rather than dataset-specific artifacts.
What would settle it
Collecting new radar data in an unseen environment or with different radar hardware and checking whether the expected calibration error stays near 0.027 while MPJPE remains around 6.4 cm would test if the uncertainty quantification generalizes beyond the training distribution.
Figures






read the original abstract
Radar-based human pose estimation enables privacy-preserving motion tracking for ambient intelligence, yet the noisy nature of radar sensing makes uncertainty quantification essential. We present RadProPoser, an end-to-end probabilistic framework that predicts three-dimensional body joints with per-joint uncertainties from raw radar tensor data. Using a variational encoder-decoder with spectral attention that fuses real and imaginary radar components across temporal frames, we model aleatoric uncertainty through learnable Gaussian and Laplace distributions. Trained on a new benchmark dataset with optical motion-capture ground truth, our method achieves 6.425 cm mean per-joint position error. The model outputs per-joint aleatoric uncertainties, and isotonic recalibration yields calibrated total uncertainty with expected calibration error of 0.027. Since spectral attention operates on individual radar tensor components, extending to multi-radar configurations requires only concatenating additional input streams. On the HuPR benchmark with dual orthogonal radars, this achieves 5.042 cm MPJPE. The framework runs at 89 frames per second (FPS) on an NVIDIA RTX 3090, exceeding the 15 Hz radar frame rate.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces RadProPoser, an end-to-end variational encoder-decoder framework for 3D human pose estimation directly from radar tensor inputs. It incorporates spectral attention to fuse real and imaginary components across frames and models per-joint aleatoric uncertainty via learnable Gaussian and Laplace distributions. On a new optical motion-capture benchmark the method reports 6.425 cm MPJPE; on the HuPR dual-radar benchmark it reports 5.042 cm MPJPE. Isotonic recalibration is applied to the output uncertainties to reach an expected calibration error of 0.027, and the model runs at 89 FPS on an RTX 3090.
Significance. If the empirical results and uncertainty claims hold, the work is significant for privacy-preserving ambient sensing because it supplies both pose estimates and per-joint uncertainty measures that can be used for downstream safety filtering. The release of a new radar benchmark with motion-capture ground truth and the demonstration of straightforward multi-radar extension are concrete contributions. The reported speed and cross-benchmark numbers provide useful reference points for the community.
major comments (1)
- [Abstract and Results] Abstract and Results section: the headline claim that the model 'knows its limits' rests on per-joint aleatoric uncertainties, yet the reported ECE of 0.027 is obtained only after isotonic recalibration. Please state explicitly whether the recalibration parameters were fitted on a validation split or on the test set itself, and report the raw (pre-recalibration) ECE and negative log-likelihood values so that readers can assess whether the variational training alone produces well-calibrated uncertainties.
minor comments (2)
- [§3.2] §3.2: the spectral attention module is described at a high level; adding the explicit attention equations or a small diagram would improve reproducibility.
- [Table 2] Table 2: confirm that all competing methods were re-trained or evaluated under identical data splits and input preprocessing as RadProPoser.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback and positive assessment of the work's significance for privacy-preserving sensing. We address the major comment below and will revise the manuscript to provide the requested clarifications on uncertainty calibration.
read point-by-point responses
-
Referee: [Abstract and Results] Abstract and Results section: the headline claim that the model 'knows its limits' rests on per-joint aleatoric uncertainties, yet the reported ECE of 0.027 is obtained only after isotonic recalibration. Please state explicitly whether the recalibration parameters were fitted on a validation split or on the test set itself, and report the raw (pre-recalibration) ECE and negative log-likelihood values so that readers can assess whether the variational training alone produces well-calibrated uncertainties.
Authors: We agree that these details are important for rigorously supporting the uncertainty claims. The isotonic recalibration parameters were fitted on the validation split only, with no access to test data. In the revised manuscript we will explicitly state this and add the raw pre-recalibration ECE and negative log-likelihood values (for both Gaussian and Laplace heads) to the Results section and a new calibration table. This will allow readers to evaluate the calibration produced by the variational encoder-decoder and spectral attention alone. revision: yes
Circularity Check
No significant circularity; results from standard empirical training and held-out evaluation
full rationale
The paper presents an end-to-end variational encoder-decoder trained on a new radar tensor dataset with optical motion-capture ground truth. Reported metrics (6.425 cm MPJPE and post-recalibration ECE of 0.027) are obtained via supervised learning and standard evaluation on held-out data rather than any claimed prediction reducing by the paper's equations to quantities defined via fitted parameters or self-citations. The isotonic recalibration is an explicit post-hoc step for reporting calibration error and does not make the core pose estimation or uncertainty modeling self-definitional. No load-bearing self-citations or uniqueness theorems appear in the derivation chain.
Axiom & Free-Parameter Ledger
free parameters (1)
- learnable parameters of Gaussian and Laplace distributions
axioms (1)
- domain assumption Raw radar tensor data over temporal frames contains sufficient information to estimate 3D body joints when processed with spectral attention.
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
We use variational inference to model a distribution over latent variables... Gaussian and Laplacian priors... NLL(y, μ, σ²) = ||y−μ||²₂/σ² + γ Σ log(σ²_i)
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
isotonic recalibration yields calibrated total uncertainty with expected calibration error of 0.027
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Forward citations
Cited by 1 Pith paper
-
Doppler Prompting for Stable mmWave-based Human Pose Estimation
PULSE stabilizes mmWave human pose estimation by screening Doppler motion prompts before injecting them into spatial magnitude reasoning.
Reference graph
Works this paper leans on
-
[1]
Remote res- piratory monitoring in the time of covid-19,
C. Massaroni, A. Nicol `o, E. Schena, and M. Sacchetti, “Remote res- piratory monitoring in the time of covid-19,” Frontiers in physiology , vol. 11, p. 635, 2020
work page 2020
-
[2]
Heart rate variability assessment using doppler radar with linear demodulation,
O. Boric-Lubecke, W. Massagram, V . M. Lubecke, A. Host-Madsen, and B. Jokanovic, “Heart rate variability assessment using doppler radar with linear demodulation,” in 2008 38th European Microwave Conference . IEEE, 2008, pp. 420–423
work page 2008
-
[3]
M. Ogunsina, C. P. Efunniyi, O. S. Osundare, S. O. Folorunsho, and L. A. Akwawa, “Advanced sensor fusion and localization techniques for autonomous systems: A review and new approaches,” International Journal of Frontline Research in Engineering and Technology , vol. 2, no. 1, 2024
work page 2024
-
[4]
K. Shahriari and M. Shahriari, “Ieee standard review—ethically aligned design: A vision for prioritizing human wellbeing with artificial intel- ligence and autonomous systems,” in 2017 IEEE Canada International Humanitarian Technology Conference (IHTC) . IEEE, 2017, pp. 197– 201
work page 2017
-
[5]
A structured review of literature on uncertainty in machine learning & deep learning,
F. Fakour, A. Mosleh, and R. Ramezani, “A structured review of literature on uncertainty in machine learning & deep learning,” arXiv preprint arXiv:2406.00332, 2024
-
[6]
E. Union, “Regulation of the european parliament and of the council laying down harmonized rules on artificial intelligence (artificial intelligence act),” 2024, official Journal of the European Union. [Online]. Available: https://artificialintelligenceact.eu/article/13/
work page 2024
-
[7]
Hupr: A benchmark for human pose estimation using millimeter wave radar,
S.-P. Lee, N. P. Kini, W.-H. Peng, C.-W. Ma, and J.-N. Hwang, “Hupr: A benchmark for human pose estimation using millimeter wave radar,” in Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision, 2023, pp. 5715–5724
work page 2023
-
[8]
Task-specific feature purifying in radar-based human pose estimation,
Z. Cao, J. Zhang, R. Chen, X. Guo, and G. Wang, “Task-specific feature purifying in radar-based human pose estimation,” IEEE Transactions on Aerospace and Electronic Systems , 2023
work page 2023
-
[9]
A joint global–local network for human pose estimation with millimeter wave radar,
Z. Cao, W. Ding, R. Chen, J. Zhang, X. Guo, and G. Wang, “A joint global–local network for human pose estimation with millimeter wave radar,” IEEE Internet of Things Journal , vol. 10, no. 1, pp. 434–446, 2022
work page 2022
-
[10]
mm-pose: Real-time human skeletal posture estimation using mmwave radars and cnns,
A. Sengupta, F. Jin, R. Zhang, and S. Cao, “mm-pose: Real-time human skeletal posture estimation using mmwave radars and cnns,” IEEE Sensors Journal, vol. 20, no. 17, pp. 10 032–10 044, 2020
work page 2020
-
[11]
Rt-pose: A 4d radar tensor-based 3d human pose estimation and localization benchmark,
Y .-H. Ho, J.-H. Cheng, S. Y . Kuan, Z. Jiang, W. Chai, H.-W. Huang, C.- L. Lin, and J.-N. Hwang, “Rt-pose: A 4d radar tensor-based 3d human pose estimation and localization benchmark,” in European Conference on Computer Vision . Springer, 2024, pp. 107–125
work page 2024
-
[12]
B. Zhu, Z. He, W. Xiong, G. Ding, J. Liu, T. Huang, W. Chen, and W. Xiang, “Probradarm3f: mmwave radar based human skeletal pose estimation with probability map guided multi-format feature fusion,” arXiv preprint arXiv:2405.05164 , 2024
-
[13]
Lidar-based detection, tracking, and property estimation: A contemporary review,
M. Hasan, J. Hanawa, R. Goto, R. Suzuki, H. Fukuda, Y . Kuno, and Y . Kobayashi, “Lidar-based detection, tracking, and property estimation: A contemporary review,”Neurocomputing, vol. 506, pp. 393–405, 2022
work page 2022
-
[14]
Fetusmap: Fetal pose estimation in 3d ultrasound,
X. Yang, W. Shi, H. Dou, J. Qian, Y . Wang, W. Xue, S. Li, D. Ni, and P.- A. Heng, “Fetusmap: Fetal pose estimation in 3d ultrasound,” inMedical Image Computing and Computer Assisted Intervention–MICCAI 2019: 22nd International Conference, Shenzhen, China, October 13–17, 2019, Proceedings, Part V 22 . Springer, 2019, pp. 281–289
work page 2019
-
[15]
Deep learning-based human pose estimation: A survey,
C. Zheng, W. Wu, C. Chen, T. Yang, S. Zhu, J. Shen, N. Kehtarnavaz, and M. Shah, “Deep learning-based human pose estimation: A survey,” ACM Computing Surveys , vol. 56, no. 1, pp. 1–37, 2023
work page 2023
-
[16]
Noise in homodyne fmcw radar systems and its effects on ranging precision,
K. Thurn, R. Ebelt, and M. V ossiek, “Noise in homodyne fmcw radar systems and its effects on ranging precision,” in 2013 IEEE MTT-S International Microwave Symposium Digest (MTT) . IEEE, 2013, pp. 1–3
work page 2013
-
[17]
M. A. Richards et al. , Fundamentals of radar signal processing . Mcgraw-hill New York, 2005, vol. 1
work page 2005
-
[18]
Toward unobtrusive in-home gait analysis based on radar micro-doppler signatures,
A.-K. Seifert, M. G. Amin, and A. M. Zoubir, “Toward unobtrusive in-home gait analysis based on radar micro-doppler signatures,” IEEE Transactions on Biomedical Engineering, vol. 66, no. 9, pp. 2629–2640, 2019
work page 2019
-
[19]
A survey on radar-based continuous human activity recognition,
I. Ullmann, R. G. Guendel, N. C. Kruse, F. Fioranelli, and A. Yarovoy, “A survey on radar-based continuous human activity recognition,” IEEE Journal of Microwaves , vol. 3, no. 3, pp. 938–950, 2023
work page 2023
-
[20]
M. I. Skolnik et al., Introduction to radar systems . McGraw-hill New York, 1980, vol. 3
work page 1980
-
[21]
Nlp based skeletal pose estimation using mmwave radar point-cloud: A simulation approach,
A. Sengupta, F. Jin, and S. Cao, “Nlp based skeletal pose estimation using mmwave radar point-cloud: A simulation approach,” in2020 IEEE Radar Conference (RadarConf20) . IEEE, 2020, pp. 1–6
work page 2020
-
[22]
End-to-End Learning for Human Pose Estimation from Raw Millimeter Wave Radar Data,
J. M ¨uller, D. Krauß, L. Engel, M. V ossiek, B. Eskofier, and E. Dorschky, “End-to-End Learning for Human Pose Estimation from Raw Millimeter Wave Radar Data,” in Asilomar Conference on Signals, Systems, and Computers, 2024
work page 2024
-
[23]
A survey on depth ambiguity of 3d human pose estimation,
S. Zhang, C. Wang, W. Dong, and B. Fan, “A survey on depth ambiguity of 3d human pose estimation,” Applied Sciences , vol. 12, no. 20, p. 10591, 2022
work page 2022
-
[24]
How Robust is 3D Human Pose Estimation to Occlusion?
I. S ´ar´andi, T. Linder, K. O. Arras, and B. Leibe, “How robust is 3d human pose estimation to occlusion?” in Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Workshop on Robotic Co-Workers 4.0: Human Safety and Comfort in Human-Robot Interactive Social Environments , 2018, workshop paper. [Online]. Available...
work page internal anchor Pith review Pith/arXiv arXiv 2018
-
[25]
High- erhrnet: Scale-aware representation learning for bottom-up human pose estimation,
B. Cheng, B. Xiao, J. Wang, H. Shi, T. S. Huang, and L. Zhang, “High- erhrnet: Scale-aware representation learning for bottom-up human pose estimation,” in Proceedings of the IEEE/CVF conference on computer vision and pattern recognition , 2020, pp. 5386–5395
work page 2020
-
[26]
Back to optimization: Diffusion-based zero-shot 3d human pose estimation,
Z. Jiang, Z. Zhou, L. Li, W. Chai, C.-Y . Yang, and J.-N. Hwang, “Back to optimization: Diffusion-based zero-shot 3d human pose estimation,” in Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision, 2024, pp. 6142–6152
work page 2024
-
[27]
Re- covering human pose and shape from through-the-wall radar images,
Z. Zheng, J. Pan, Z. Ni, C. Shi, D. Zhang, X. Liu, and G. Fang, “Re- covering human pose and shape from through-the-wall radar images,” IEEE Transactions on Geoscience and Remote Sensing , vol. 60, pp. 1– 15, 2022
work page 2022
-
[28]
Diffusion model is a good pose estimator from 3d rf-vision,
J. Fan, J. Yang, Y . Xu, and L. Xie, “Diffusion model is a good pose estimator from 3d rf-vision,” in European Conference on Computer Vision. Springer, 2025, pp. 1–18
work page 2025
-
[29]
Enhancing skeletal pose estimation from mmwave point clouds through uncertainty reduction,
H.-C. Chiang, G.-H. Li, F. Wang, S. Shirmohammadi, and C.-H. Hsu, “Enhancing skeletal pose estimation from mmwave point clouds through uncertainty reduction,” in Proceedings of the 5th International Workshop on Human-centric Multimedia Analysis , 2024, pp. 45–53
work page 2024
-
[30]
Human tracking with mmwave radars: A deep learning approach with uncertainty estimation,
J. Pegoraro and M. Rossi, “Human tracking with mmwave radars: A deep learning approach with uncertainty estimation,” in 2022 IEEE 23rd International Workshop on Signal Processing Advances in Wireless Communication (SPAWC). IEEE, 2022, pp. 1–5
work page 2022
-
[31]
Leveraging heteroscedastic aleatoric uncertainties for robust real-time lidar 3d object detection,
D. Feng, L. Rosenbaum, F. Timm, and K. Dietmayer, “Leveraging heteroscedastic aleatoric uncertainties for robust real-time lidar 3d object detection,” in 2019 IEEE Intelligent Vehicles Symposium (IV) . IEEE, 2019, pp. 1280–1287
work page 2019
-
[32]
Incorporating point uncertainty in radar slam,
Y . Xu, Q. Huang, S. Shen, and H. Yin, “Incorporating point uncertainty in radar slam,” IEEE Robotics and Automation Letters , 2025. 15
work page 2025
-
[33]
Uncertainty-aware 3d human pose estimation from monocular video,
J. Zhang, Y . Chen, and Z. Tu, “Uncertainty-aware 3d human pose estimation from monocular video,” in Proceedings of the 30th ACM International Conference on Multimedia , 2022, pp. 5102–5113
work page 2022
-
[34]
Uncertainty-aware adaptation for self-supervised 3d human pose estimation,
J. N. Kundu, S. Seth, P. YM, V . Jampani, A. Chakraborty, and R. V . Babu, “Uncertainty-aware adaptation for self-supervised 3d human pose estimation,” in Proceedings of the IEEE/CVF conference on computer vision and pattern recognition , 2022, pp. 20 448–20 459
work page 2022
-
[35]
Diff- pose: Toward more reliable 3d pose estimation,
J. Gong, L. G. Foo, Z. Fan, Q. Ke, H. Rahmani, and J. Liu, “Diff- pose: Toward more reliable 3d pose estimation,” in Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , 2023, pp. 13 041–13 051
work page 2023
-
[36]
Diffpose: Spatiotemporal diffusion model for video-based human pose estimation,
R. Feng, Y . Gao, T. H. E. Tse, X. Ma, and H. J. Chang, “Diffpose: Spatiotemporal diffusion model for video-based human pose estimation,” in Proceedings of the IEEE/CVF International Conference on Computer Vision, 2023, pp. 14 861–14 872
work page 2023
-
[37]
Diffpose: Multi-hypothesis human pose estimation using diffusion models,
K. Holmquist and B. Wandt, “Diffpose: Multi-hypothesis human pose estimation using diffusion models,” in Proceedings of the IEEE/CVF international conference on computer vision , 2023, pp. 15 977–15 987
work page 2023
-
[38]
Human pose regression with residual log-likelihood estimation,
J. Li, S. Bian, A. Zeng, C. Wang, B. Pang, W. Liu, and C. Lu, “Human pose regression with residual log-likelihood estimation,” in Proceedings of the IEEE/CVF international conference on computer vision , 2021, pp. 11 025–11 034
work page 2021
-
[39]
Poco: 3d pose and shape estimation with confidence,
S. K. Dwivedi, C. Schmid, H. Yi, M. J. Black, and D. Tzionas, “Poco: 3d pose and shape estimation with confidence,” in 2024 International Conference on 3D Vision (3DV) . IEEE, 2024, pp. 85–95
work page 2024
-
[40]
Deep directional statistics: Pose estimation with uncertainty quantification,
S. Prokudin, P. Gehler, and S. Nowozin, “Deep directional statistics: Pose estimation with uncertainty quantification,” in Proceedings of the European conference on computer vision (ECCV) , 2018, pp. 534–551
work page 2018
-
[41]
Plausible uncertainties for human pose regression,
L. Bramlage, M. Karg, and C. Curio, “Plausible uncertainties for human pose regression,” in Proceedings of the IEEE/CVF International Conference on Computer Vision , 2023, pp. 15 133–15 142
work page 2023
-
[42]
Structured aleatoric uncertainty in human pose estimation
N. B. Gundavarapu, D. Srivastava, R. Mitra, A. Sharma, and A. Jain, “Structured aleatoric uncertainty in human pose estimation.” in CVPR Workshops, vol. 2, 2019, p. 2
work page 2019
-
[43]
What uncertainties do we need in bayesian deep learning for computer vision?
A. Kendall and Y . Gal, “What uncertainties do we need in bayesian deep learning for computer vision?” Advances in neural information processing systems, vol. 30, 2017
work page 2017
-
[44]
M. Stephan, T. Stadelmayer, A. Santra, G. Fischer, R. Weigel, and F. Lurz, “Radar image reconstruction from raw adc data using para- metric variational autoencoder with domain adaptation,” in 2020 25th International Conference on Pattern Recognition (ICPR) . IEEE, 2021, pp. 9529–9536
work page 2020
-
[45]
A variational bayesian inference-inspired unrolled deep network for mimo detection,
Q. Wan, J. Fang, Y . Huang, H. Duan, and H. Li, “A variational bayesian inference-inspired unrolled deep network for mimo detection,” IEEE Transactions on Signal Processing , vol. 70, pp. 423–437, 2022
work page 2022
-
[46]
User location tracking in massive mimo systems via dynamic variational bayesian inference,
L. Lian, A. Liu, and V . K. Lau, “User location tracking in massive mimo systems via dynamic variational bayesian inference,” IEEE Transactions on Signal Processing , vol. 67, no. 21, pp. 5628–5642, 2019
work page 2019
-
[47]
Fmcw radar sensing for indoor drones using variational auto-encoders,
A. Safa, T. Verbelen, O. Catal, T. Van de Maele, M. Hartmann, B. Dhoedt, and A. Bourdoux, “Fmcw radar sensing for indoor drones using variational auto-encoders,” in 2023 IEEE Radar Conference (RadarConf23). IEEE, 2023, pp. 1–6
work page 2023
-
[48]
mmfall: Fall detection using 4- d mmwave radar and a hybrid variational rnn autoencoder,
F. Jin, A. Sengupta, and S. Cao, “mmfall: Fall detection using 4- d mmwave radar and a hybrid variational rnn autoencoder,” IEEE Transactions on Automation Science and Engineering , vol. 19, no. 2, pp. 1245–1257, 2020
work page 2020
-
[49]
Accurate uncertainties for deep learning using calibrated regression,
V . Kuleshov, N. Fenner, and S. Ermon, “Accurate uncertainties for deep learning using calibrated regression,” in International conference on machine learning. PMLR, 2018, pp. 2796–2804
work page 2018
-
[50]
A review and tutorial on machine learning-enabled radar-based biomedical monitoring,
D. Krauss, L. Engel, T. Ott, J. Br ¨aunig, R. Richer, M. Gambietz, N. Al- brecht, E. M. Hille, I. Ullmann, M. Braun et al., “A review and tutorial on machine learning-enabled radar-based biomedical monitoring,” IEEE Open Journal of Engineering in Medicine and Biology , 2024
work page 2024
-
[51]
A survey on device-free indoor localization and tracking in the multi-resident environment,
K. Ngamakeur, S. Yongchareon, J. Yu, and S. U. Rehman, “A survey on device-free indoor localization and tracking in the multi-resident environment,” ACM Computing Surveys (CSUR) , vol. 53, no. 4, pp. 1– 29, 2020
work page 2020
-
[52]
Micro-doppler effect of micromotion dynamics: A review,
V . C. Chen, “Micro-doppler effect of micromotion dynamics: A review,” Independent Component Analyses, Wavelets, and Neural Networks , vol. 5102, pp. 240–249, 2003
work page 2003
-
[53]
Cubelearn: End-to-end learning for human motion recognition from raw mmwave radar signals,
P. Zhao, C. X. Lu, B. Wang, N. Trigoni, and A. Markham, “Cubelearn: End-to-end learning for human motion recognition from raw mmwave radar signals,” IEEE Internet of Things Journal , vol. 10, no. 12, pp. 10 236–10 249, 2023
work page 2023
-
[54]
T-fftradnet: Object detection with swin vision transformers from raw adc radar signals,
J. Giroux, M. Bouchard, and R. Laganiere, “T-fftradnet: Object detection with swin vision transformers from raw adc radar signals,” in Proceed- ings of the IEEE/CVF International Conference on Computer Vision , 2023, pp. 4030–4039
work page 2023
-
[55]
Cpformer: End-to-end multi-person human pose estimation from raw radar cubes with transformers,
L. Chen and G. Wang, “Cpformer: End-to-end multi-person human pose estimation from raw radar cubes with transformers,” IEEE Sensors Journal, 2025
work page 2025
-
[56]
Deep 3d human pose estimation: A review,
J. Wang, S. Tan, X. Zhen, S. Xu, F. Zheng, Z. He, and L. Shao, “Deep 3d human pose estimation: A review,” Computer Vision and Image Understanding, vol. 210, p. 103225, 2021
work page 2021
-
[57]
Mobilehumanpose: Toward real-time 3d human pose estimation in mobile devices,
S. Choi, S. Choi, and C. Kim, “Mobilehumanpose: Toward real-time 3d human pose estimation in mobile devices,” in Proceedings of the IEEE/CVF conference on computer vision and pattern recognition, 2021, pp. 2328–2338
work page 2021
-
[58]
H. S. Nguyen, M. Kim, C. Im, S. Han, and J. Han, “Convnextpose: A fast accurate method for 3d human pose estimation and its ar fitness application in mobile devices,” IEEE Access , vol. 11, pp. 117 393– 117 402, 2023
work page 2023
-
[59]
Motionbert: A unified perspective on learning human motion representations,
W. Zhu, X. Ma, Z. Liu, L. Liu, W. Wu, and Y . Wang, “Motionbert: A unified perspective on learning human motion representations,” in Proceedings of the IEEE/CVF international conference on computer vision, 2023, pp. 15 085–15 099
work page 2023
-
[60]
Motionagformer: Enhancing 3d human pose estimation with a transformer-gcnformer network,
S. Mehraban, V . Adeli, and B. Taati, “Motionagformer: Enhancing 3d human pose estimation with a transformer-gcnformer network,” in Proceedings of the IEEE/CVF winter conference on applications of computer vision, 2024, pp. 6920–6930
work page 2024
-
[61]
Simcc: A simple coordinate classification perspective for human pose estimation,
Y . Li, S. Yang, P. Liu, S. Zhang, Y . Wang, Z. Wang, W. Yang, and S.-T. Xia, “Simcc: A simple coordinate classification perspective for human pose estimation,” in European Conference on Computer Vision . Springer, 2022, pp. 89–106
work page 2022
-
[62]
Simple baselines for human pose estimation and tracking,
B. Xiao, H. Wu, and Y . Wei, “Simple baselines for human pose estimation and tracking,” in Proceedings of the European conference on computer vision (ECCV) , 2018, pp. 466–481
work page 2018
-
[63]
Integral human pose regression,
X. Sun, B. Xiao, F. Wei, S. Liang, and Y . Wei, “Integral human pose regression,” in Proceedings of the European conference on computer vision (ECCV), 2018, pp. 529–545
work page 2018
-
[64]
L. Engel, J. Mueller, E. J. F. Rendon, E. Dorschky, D. Krauss, I. Ull- mann, B. M. Eskofier, and M. V ossiek, “Advanced millimeter wave radar-based human pose estimation enabled by a deep learning neural network trained with optical motion capture ground truth data,” IEEE Journal of Microwaves , pp. 1–15, 2025
work page 2025
-
[65]
T. Instruments, “Radar system specifications,” available online: (https: //www.ti.224com/tool/IWR6843AOPEVM [Accessed: 11, 2024]
work page 2024
-
[66]
Optical motion capture system,
Optitrack, “Optical motion capture system,” available online: (https:// optitrack.com/cameras/flex-23913 [Accessed: 11, 2024]
work page 2024
-
[67]
Deep high-resolution representation learning for visual recognition,
J. Wang, K. Sun, T. Cheng, B. Jiang, C. Deng, Y . Zhao, D. Liu, Y . Mu, M. Tan, X. Wang et al. , “Deep high-resolution representation learning for visual recognition,” IEEE transactions on pattern analysis and machine intelligence , vol. 43, no. 10, pp. 3349–3364, 2020
work page 2020
-
[68]
How reparametrization trick broke differentially-private text representation learning,
I. Habernal, “How reparametrization trick broke differentially-private text representation learning,” in Proceedings of the 60th Annual Meeting of the Association for Computational Linguistics . Dublin, Ireland: Association for Computational Linguistics, 2022, p. (to appear). [Online]. Available: https://arxiv.org/abs/2202.12138
-
[69]
A. Amini, W. Schwarting, A. Soleimany, and D. Rus, “Deep evidential regression,” Advances in neural information processing systems, vol. 33, pp. 14 927–14 937, 2020
work page 2020
-
[70]
Density estimation using real nvp,
L. Dinh, J. Sohl-Dickstein, and S. Bengio, “Density estimation using real nvp,” in International Conference on Learning Representations (ICLR) , 2017
work page 2017
-
[71]
Variational inference with normalizing flows,
D. Rezende and S. Mohamed, “Variational inference with normalizing flows,” inInternational conference on machine learning. PMLR, 2015, pp. 1530–1538
work page 2015
-
[72]
Opensim: open-source soft- ware to create and analyze dynamic simulations of movement,
S. L. Delp, F. C. Anderson, A. S. Arnold, P. Loan, A. Habib, C. T. John, E. Guendelman, and D. G. Thelen, “Opensim: open-source soft- ware to create and analyze dynamic simulations of movement,” IEEE transactions on biomedical engineering, vol. 54, no. 11, pp. 1940–1950, 2007
work page 1940
-
[73]
The unreasonable effec- tiveness of deep evidential regression,
N. Meinert, J. Gawlikowski, and A. Lavin, “The unreasonable effec- tiveness of deep evidential regression,” in Proceedings of the AAAI Conference on Artificial Intelligence , vol. 37, no. 8, 2023, pp. 9134– 9142
work page 2023
-
[74]
Normalizing flow ensembles for rich aleatoric and epistemic uncertainty modeling,
L. Berry and D. Meger, “Normalizing flow ensembles for rich aleatoric and epistemic uncertainty modeling,” in Proceedings of the AAAI Con- ference on Artificial Intelligence , vol. 37, no. 6, 2023, pp. 6806–6814
work page 2023
-
[75]
Ray-tracing simulator for radar signals propagation in radar networks,
D. Gubelli, O. A. Krasnov, and O. Yarovyi, “Ray-tracing simulator for radar signals propagation in radar networks,” in 2013 European Radar Conference. IEEE, 2013, pp. 73–76. 16
work page 2013
-
[76]
A realistic radar ray tracing simulator for large mimo-arrays in automotive environments,
C. Sch ¨ußler, M. Hoffmann, J. Br ¨aunig, I. Ullmann, R. Ebelt, and M. V ossiek, “A realistic radar ray tracing simulator for large mimo-arrays in automotive environments,”IEEE Journal of Microwaves, vol. 1, no. 4, pp. 962–974, 2021
work page 2021
-
[77]
Domain randomization for transferring deep neural networks from simulation to the real world,
J. Tobin, R. Fong, A. Ray, J. Schneider, W. Zaremba, and P. Abbeel, “Domain randomization for transferring deep neural networks from simulation to the real world,” in2017 IEEE/RSJ international conference on intelligent robots and systems (IROS) . IEEE, 2017, pp. 23–30
work page 2017
-
[78]
C. A. Myers, P. J. Laz, K. B. Shelburne, and B. S. Davidson, “A probabilistic approach to quantify the impact of uncertainty propagation in musculoskeletal simulations,” Annals of biomedical engineering , vol. 43, pp. 1098–1111, 2015
work page 2015
-
[79]
J. M. Wakeling, M. Febrer-Nafr ´ıa, and F. De Groote, “A review of the efforts to develop muscle and musculoskeletal models for biomechanics in the last 50 years,” Journal of biomechanics , vol. 155, p. 111657, 2023
work page 2023
-
[80]
E. Dorschky, M. Nitschke, A.-K. Seifer, A. J. van den Bogert, and B. M. Eskofier, “Estimation of gait kinematics and kinetics from inertial sensor data using optimal control of musculoskeletal models,” Journal of biomechanics, vol. 95, p. 109278, 2019
work page 2019
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.