CEER: Compliant End-Effector and Root Control as a Unified Interface for Hierarchical Humanoid Loco-Manipulation
Pith reviewed 2026-05-20 04:54 UTC · model grok-4.3
The pith
Compliant end-effector and root control provides a unified interface for humanoid loco-manipulation.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The authors show that distilling a general motion-tracking controller via a teacher-student framework produces a low-level policy driven only by end-effector pose targets and root motion commands; this policy retains compliance-aware whole-body behavior and supports a hierarchical framework in which heterogeneous planners integrate through the same EE-root interface for diverse loco-manipulation tasks.
What carries the argument
The CEER abstraction, which defines an interpretable task space from root motion commands and end-effector pose targets to drive compliance-aware whole-body control.
If this is right
- Heterogeneous planners and task modules can integrate through the EE-root interface without retraining the underlying whole-body policy.
- End-effector tracking reaches 3.3 cm accuracy with substantially lower jerk than baseline methods.
- Stable contact-rich manipulation is maintained under teleoperation on hardware.
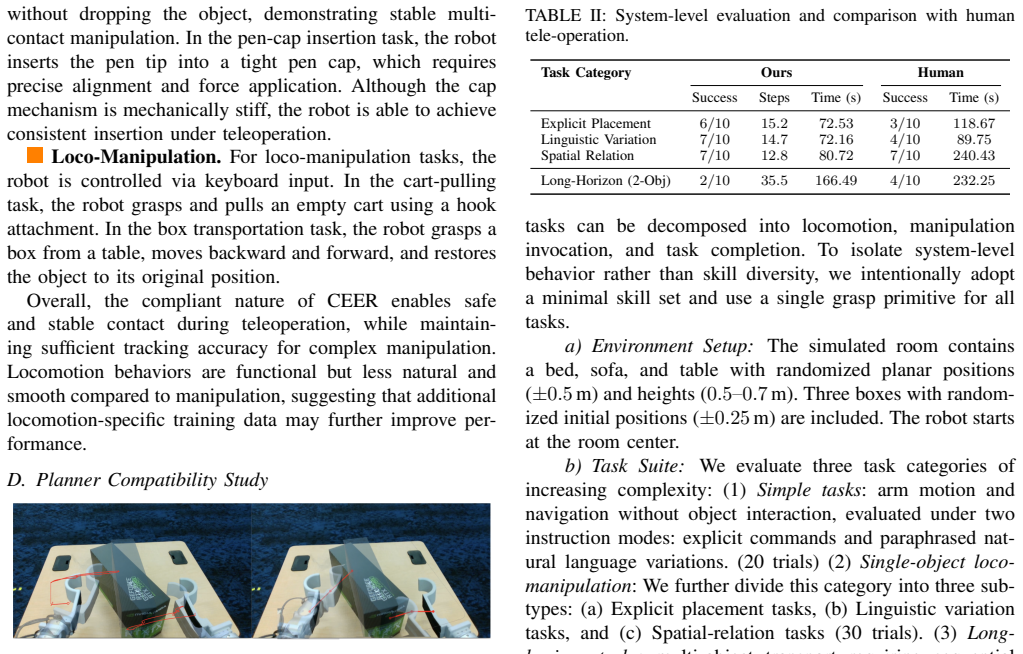
- Success rates reach up to 70 percent in simulated single-object loco-manipulation tasks inside room-scale environments.
Where Pith is reading between the lines
- The same EE-root interface could simplify transferring loco-manipulation skills across different humanoid platforms if the command space is treated as a standard.
- Pairing the interface with vision-based high-level planners might enable closed-loop autonomous operation without teleoperation.
- Scaling the hierarchy to multi-step or multi-object tasks would test whether the abstraction remains stable over longer horizons.
Load-bearing premise
The distilled low-level policy preserves the compliance and stability of the original whole-body controller when it receives only end-effector and root commands, especially during contact-rich tasks on physical hardware.
What would settle it
Hardware trials that show instability, loss of compliance, or markedly higher jerk and tracking error than the reported 3.3 cm during contact-rich manipulation would falsify the claim that the EE-root policy works as a reliable abstraction.
Figures



read the original abstract
Humanoid robots have achieved impressive locomotion performance, yet contact-rich and long-horizon manipulation remains a major bottleneck. Manipulation is inherently contact-rich and demands compliant whole-body control for stable interaction, while its diversity and long-horizon nature favor modular, planner-compatible interfaces over joint-space tracking. We propose CEER, a compliant end-effector-root (EE-root) control abstraction for modular humanoid loco-manipulation within a hierarchical planning framework. CEER enables compliance-aware whole-body control in an interpretable task space defined by root motion commands and end-effector pose targets, and supports plug-and-play integration with heterogeneous high-level planners. A teacher-student framework is adopted to distill a general motion-tracking controller into a low-level policy that consumes only EE-root commands. We further construct a hierarchical system that integrates heterogeneous planners and task modules through the EE-root interface, enabling diverse manipulation tasks without retraining the underlying whole-body policy. Experiments in simulation and on hardware demonstrate 3.3 cm end-effector tracking accuracy with substantially reduced jerk compared to baselines, stable contact-rich manipulation under teleoperation, and up to 70% success in simulated single-object loco-manipulation tasks within a room-scale environment. These results indicate that compliant EE-root control provides a practical abstraction for humanoid loco-manipulation, enabling modular and scalable integration of diverse skills.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes CEER, a compliant end-effector and root (EE-root) control abstraction as a unified interface for hierarchical humanoid loco-manipulation. It distills a whole-body teacher controller into a low-level policy that accepts only EE-root commands, enabling plug-and-play integration with heterogeneous high-level planners for diverse tasks. Simulation and hardware results report 3.3 cm end-effector tracking accuracy, reduced jerk relative to baselines, stable contact-rich teleoperated manipulation, and up to 70% success in room-scale single-object loco-manipulation.
Significance. If the distillation successfully transfers compliance and stability, CEER could offer a practical, interpretable task-space layer that decouples high-level planning from low-level whole-body control, supporting modular and scalable humanoid systems without per-task retraining. The hierarchical integration of diverse planners is a notable strength if the closed-loop behavior under contact is validated.
major comments (2)
- [Section 4] Section 4 (teacher-student distillation): The central claim requires that the low-level policy, driven only by EE-root commands, reproduces the compliance, contact-force behavior, and root stability of the original whole-body controller. The reported 3.3 cm tracking accuracy and jerk reduction are necessary but do not directly measure force compliance, contact-force variance, or recovery from unexpected collisions; additional hardware metrics (e.g., force/torque residuals or perturbation recovery) are needed to confirm preservation for contact-rich tasks.
- [Experiments] Experiments and abstract: The 70% success rate and accuracy figures are presented without trial counts, error bars, statistical tests, or explicit baseline implementations. This omission prevents independent assessment of robustness and undermines the quantitative support for the modular abstraction claim.
minor comments (2)
- The abstract states 'substantially reduced jerk compared to baselines' without naming the baselines or providing quantitative deltas; clarify these in the results section.
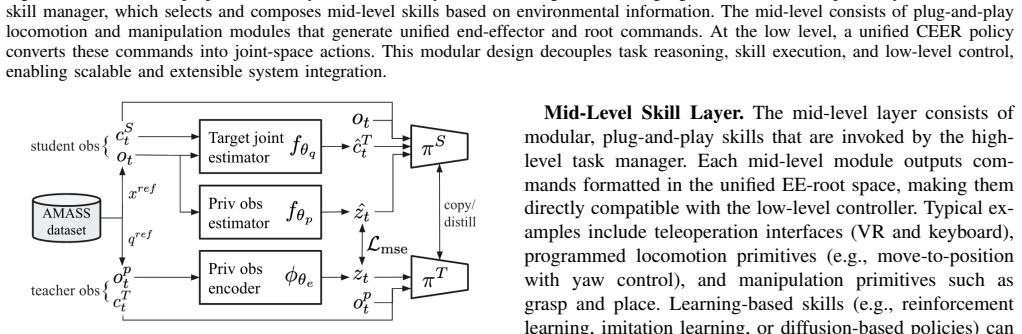
- Notation for the EE-root interface (root motion commands and end-effector pose targets) could be formalized earlier with a clear diagram of the command space.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive feedback. We address each major comment below and indicate the specific revisions planned for the next version of the manuscript.
read point-by-point responses
-
Referee: [Section 4] Section 4 (teacher-student distillation): The central claim requires that the low-level policy, driven only by EE-root commands, reproduces the compliance, contact-force behavior, and root stability of the original whole-body controller. The reported 3.3 cm tracking accuracy and jerk reduction are necessary but do not directly measure force compliance, contact-force variance, or recovery from unexpected collisions; additional hardware metrics (e.g., force/torque residuals or perturbation recovery) are needed to confirm preservation for contact-rich tasks.
Authors: We agree that direct measurements of force compliance, contact-force variance, and perturbation recovery would strengthen the evidence that the distilled policy preserves the teacher's behavior. The manuscript currently supports this indirectly through hardware demonstrations of stable contact-rich teleoperation and reduced jerk. In the revision we will add analysis of force/torque residuals measured during the existing hardware contact tasks and include simulation results showing recovery from unexpected external forces while tracking EE-root commands. We note that new hardware perturbation experiments were not performed for this study. revision: partial
-
Referee: [Experiments] Experiments and abstract: The 70% success rate and accuracy figures are presented without trial counts, error bars, statistical tests, or explicit baseline implementations. This omission prevents independent assessment of robustness and undermines the quantitative support for the modular abstraction claim.
Authors: We acknowledge that the absence of trial counts, error bars, statistical tests, and explicit baseline details limits the ability to assess robustness. In the revised manuscript we will update the Experiments section and abstract to report the exact number of trials for each metric, include error bars or standard deviations on the 3.3 cm accuracy and success-rate figures, describe the statistical tests applied, and provide clear specifications of all baseline controllers and their implementations. revision: yes
Circularity Check
No circularity: claims rest on experimental validation of the EE-root interface rather than self-referential definitions or fitted predictions
full rationale
The paper introduces CEER as a task-space abstraction for humanoid control, distills a whole-body teacher into an EE-root student policy, and validates the approach via simulation and hardware experiments reporting 3.3 cm tracking accuracy, reduced jerk, and task success rates. No equations, parameter fits, or definitions are shown to reduce to their own inputs by construction. The teacher-student step is presented as a training procedure whose closed-loop properties are assessed empirically rather than assumed tautologically. No load-bearing self-citations or uniqueness theorems imported from prior author work are invoked to force the central result. The derivation chain therefore remains self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption End-effector pose targets and root motion commands are sufficient to produce stable, compliant whole-body control for contact-rich tasks.
invented entities (1)
-
CEER interface
no independent evidence
Reference graph
Works this paper leans on
-
[1]
Deepmimic: example-guided deep reinforcement learning of physics- based character skills,
X. B. Peng, P. Abbeel, S. Levine, and M. van de Panne, “Deepmimic: example-guided deep reinforcement learning of physics- based character skills,”ACM Transactions on Graphics, vol. 37, no. 4, p. 1–14, July 2018. [Online]. Available: http://dx.doi.org/10. 1145/3197517.3201311
-
[2]
BeyondMimic: From Motion Tracking to Versatile Humanoid Control via Guided Diffusion
Q. Liao, T. E. Truong, X. Huang, Y . Gao, G. Tevet, K. Sreenath, and C. K. Liu, “Beyondmimic: From motion tracking to versatile humanoid control via guided diffusion,” 2025. [Online]. Available: https://arxiv.org/abs/2508.08241
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[3]
arXiv preprint arXiv:2509.26633 (2025)
L. Yang, X. Huang, Z. Wu, A. Kanazawa, P. Abbeel, C. Sferrazza, C. K. Liu, R. Duan, and G. Shi, “Omniretarget: Interaction-preserving data generation for humanoid whole-body loco-manipulation and scene interaction,” 2025. [Online]. Available: https://arxiv.org/abs/ 2509.26633
-
[4]
H. Weng, Y . Li, N. Sobanbabu, Z. Wang, Z. Luo, T. He, D. Ramanan, and G. Shi, “Hdmi: Learning interactive humanoid whole-body control from human videos,” 2025. [Online]. Available: https://arxiv.org/abs/2509.16757
-
[5]
AMASS: Archive of Motion Capture as Surface Shapes
N. Mahmood, N. Ghorbani, N. F. Troje, G. Pons-Moll, and M. J. Black, “Amass: Archive of motion capture as surface shapes,” 2019. [Online]. Available: https://arxiv.org/abs/1904.03278
work page internal anchor Pith review Pith/arXiv arXiv 2019
-
[6]
Learning a unified policy for position and force control in legged loco-manipulation,
P. Zhi, P. Li, J. Yin, B. Jia, and S. Huang, “Learning a unified policy for position and force control in legged loco-manipulation,” 2025. [Online]. Available: https://arxiv.org/abs/2505.20829
-
[7]
Gentlehumanoid: Learning upper-body compliance for contact- rich human and object interaction,
Q. Lu, Y . Feng, B. Shi, M. Piseno, Z. Bao, and C. K. Liu, “Gentlehumanoid: Learning upper-body compliance for contact- rich human and object interaction,” 2025. [Online]. Available: https://arxiv.org/abs/2511.04679
-
[8]
Expressive whole-body control for humanoid robots,
X. Cheng, Y . Ji, J. Chen, R. Yang, G. Yang, and X. Wang, “Expressive whole-body control for humanoid robots,”Robotics: Science and Systems, 2024
work page 2024
-
[9]
arXiv preprint arXiv:2412.13196 (2024)
M. Ji, X. Peng, F. Liu, J. Li, G. Yang, X. Cheng, and X. Wang, “Exbody2: Advanced expressive humanoid whole-body control,”arXiv preprint arXiv: 2412.13196, 2024
- [10]
-
[11]
arXiv preprint arXiv:2406.08858 (2024)
T. He, Z. Luo, X. He, W. Xiao, C. Zhang, W. Zhang, K. Kitani, C. Liu, and G. Shi, “Omnih2o: Universal and dexterous human-to-humanoid whole-body teleoperation and learning,” 2024. [Online]. Available: https://arxiv.org/abs/2406.08858
-
[12]
Mobile-television: Predictive motion priors for humanoid whole-body control,
C. Lu, X. Cheng, J. Li, S. Yang, M. Ji, C. Yuan, G. Yang, S. Yi, and X. Wang, “Mobile-television: Predictive motion priors for humanoid whole-body control,” in2025 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2025, pp. 5364–5371
work page 2025
-
[14]
Available: https://arxiv.org/abs/2506.12851
[Online]. Available: https://arxiv.org/abs/2506.12851
-
[15]
Visualmimic: Visual humanoid loco-manipulation via motion tracking and generation,
S. Yin, Y . Ze, H.-X. Yu, C. K. Liu, and J. Wu, “Visualmimic: Visual humanoid loco-manipulation via motion tracking and generation,”
-
[16]
Available: https://arxiv.org/abs/2509.20322
[Online]. Available: https://arxiv.org/abs/2509.20322
-
[17]
Softmimic: Learning compliant whole-body control from examples,
G. B. Margolis, M. Wang, N. Fey, and P. Agrawal, “Softmimic: Learning compliant whole-body control from examples,” 2025. [Online]. Available: https://arxiv.org/abs/2510.17792
-
[18]
Chip: Adaptive compliance for humanoid control through hindsight perturbation,
S. Chen, Z. ang Cao, Z. Luo, F. Casta ˜neda, C. Li, T. Wang, Y . Yuan, L. J. Fan, C. K. Liu, and Y . Zhu, “Chip: Adaptive compliance for humanoid control through hindsight perturbation,” 2026. [Online]. Available: https://arxiv.org/abs/2512.14689
-
[19]
arXiv preprint arXiv:2505.06776 (2025)
Y . Zhang, Y . Yuan, P. Gurunath, I. Gupta, S. Omidshafiei, A. akbar Agha-mohammadi, M. Vazquez-Chanlatte, L. Pedersen, T. He, and G. Shi, “Falcon: Learning force-adaptive humanoid loco-manipulation,” 2025. [Online]. Available: https://arxiv.org/abs/ 2505.06776
-
[20]
Facet: Force-adaptive control via impedance reference tracking for legged robots,
B. Xu, H. Weng, Q. Lu, Y . Gao, and H. Xu, “Facet: Force-adaptive control via impedance reference tracking for legged robots,” 2025. [Online]. Available: https://arxiv.org/abs/2505.06883
-
[21]
Twist2: Scalable, portable, and holistic humanoid data collection system
Y . Ze, S. Zhao, W. Wang, A. Kanazawa, R. Duan, P. Abbeel, G. Shi, J. Wu, and C. K. Liu, “Twist2: Scalable, portable, and holistic humanoid data collection system,” 2025. [Online]. Available: https://arxiv.org/abs/2511.02832
-
[22]
Hover: Versatile neural whole-body controller for humanoid robots,
T. He, W. Xiao, T. Lin, Z. Luo, Z. Xu, Z. Jiang, J. Kautz, C. Liu, G. Shi, X. Wang, L. Fan, and Y . Zhu, “Hover: Versatile neural whole-body controller for humanoid robots,” 2025. [Online]. Available: https://arxiv.org/abs/2410.21229
-
[23]
Z. Luo, Y . Yuan, T. Wang, C. Li, S. Chen, F. Casta ˜neda, Z.-A. Cao, J. Li, D. Minor, Q. Ben, X. Da, R. Ding, C. Hogg, L. Song, E. Lim, E. Jeong, T. He, H. Xue, W. Xiao, Z. Wang, S. Yuen, J. Kautz, Y . Chang, U. Iqbal, L. J. Fan, and Y . Zhu, “Sonic: Supersizing motion tracking for natural humanoid whole-body control,” 2025. [Online]. Available: https://...
work page internal anchor Pith review arXiv 2025
-
[24]
Learning humanoid end-effector control for open-vocabulary visual loco-manipulation,
R. Dong, Z. Li, X. He, and S. Gupta, “Learning humanoid end-effector control for open-vocabulary visual loco-manipulation,”
-
[25]
Available: https://arxiv.org/abs/2602.16705
[Online]. Available: https://arxiv.org/abs/2602.16705
-
[26]
ReAct: Synergizing Reasoning and Acting in Language Models
S. Yao, J. Zhao, D. Yu, N. Du, I. Shafran, K. R. Narasimhan, and Y . Cao, “React: Synergizing reasoning and acting in language models,” inThe Eleventh International Conference on Learning Representations, ICLR 2023, Kigali, Rwanda, May 1-5, 2023, 2023. [Online]. Available: https://arxiv.org/abs/2210.03629
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[27]
A plug-and-play deploy framework for robots. just deploy, just do
P. L. Zihan Zhuang, Yi Dong, “A plug-and-play deploy framework for robots. just deploy, just do.” 2025. [Online]. Available: https://github.com/HansZ8/RoboJuDo
work page 2025
-
[28]
Skillblender: Towards versatile humanoid whole-body loco-manipulation via skill blending,
Y . Kuang, H. Geng, A. Elhafsi, T.-D. Do, P. Abbeel, J. Malik, M. Pavone, and Y . Wang, “Skillblender: Towards versatile humanoid whole-body loco-manipulation via skill blending,” 2025. [Online]. Available: https://arxiv.org/abs/2506.09366
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.