Adaptive Human-Robot Collaboration for Masonry Construction Under Material and Assembly Uncertainty
Pith reviewed 2026-05-21 07:36 UTC · model grok-4.3
The pith
An end-effector-mounted projector and laser scanning let a robot and human collaborate on brickwork while correcting for material variations and tolerance buildup.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
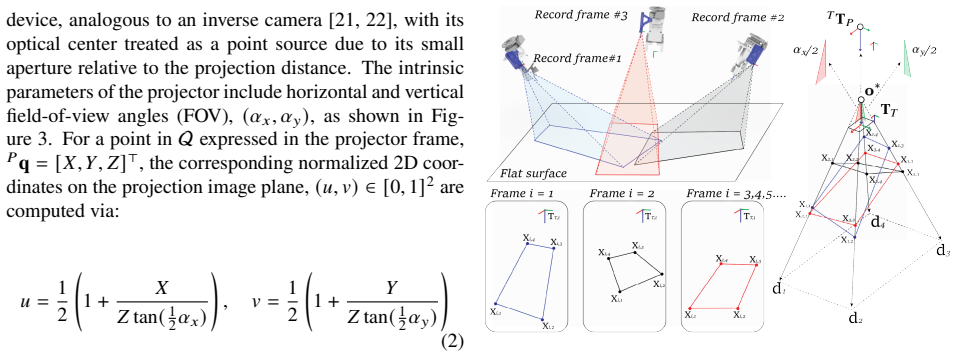
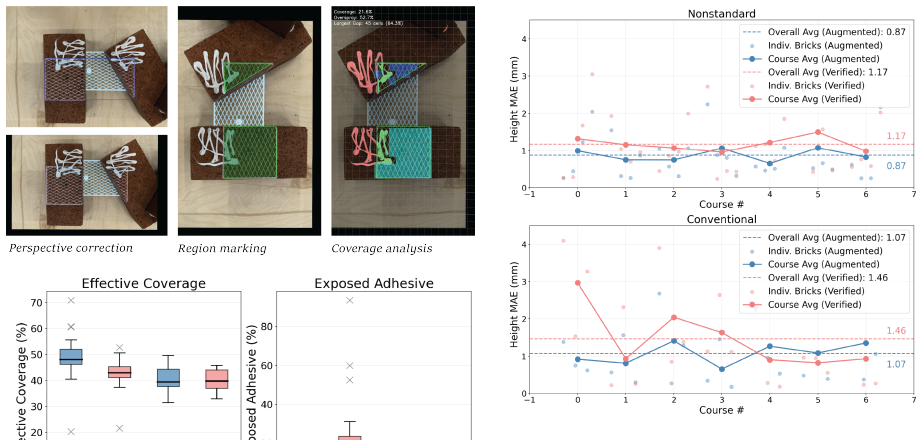
The central claim is that mounting a projector on the robot end-effector to deliver spatially registered just-in-time guidance for manual adhesive application, combined with laser scanning for feedback-driven grasping and placement pose correction, enables the collaborative system to adjust human and robotic actions to material variability and accumulated assembly tolerances, thereby improving adhesive consistency, reducing application time, maintaining level courses, and avoiding collision failures in both conventional and nonstandard brick configurations.
What carries the argument
End-effector-mounted projector for spatially registered projection guidance together with laser scanning for real-time feedback-driven pose correction.
Load-bearing premise
The projector must deliver accurate, visible, and usable guidance for adhesive application under real construction lighting and surface conditions, and laser scanning must supply timely and precise enough feedback to correct errors before tolerances cause failures.
What would settle it
A demonstration in which bright site lighting renders the projector guidance unusable or laser scans arrive too late to prevent level deviations and collisions when brick dimensions vary beyond the tested range.
Figures







read the original abstract
Human-robot collaboration in construction is often challenged by limited robot-to-human communication and the need to adapt to tolerance accumulation arising from material and assembly uncertainties. We present an adaptive human-robot collaborative workflow for masonry construction that addresses communication limitations and tolerance accumulation, demonstrated through a brickwork case study in which a robot places bricks while a human applies adhesive. This workflow is enabled by two complementary mechanisms: 1) an end-effector-mounted projector that provides spatially registered, just-in-time projection guidance for manual adhesive application, and 2) laser scanning for feedback-driven grasping and placement pose correction. Together, these mechanisms enable adjustment of human and robotic actions in response to material variability and accumulated assembly tolerances. Full-scale experiments across conventional running-bond and nonstandard configurations demonstrate that projection guidance improves adhesive application consistency and reduces application time, while laser-based correction maintains level courses and avoids collision-prone failures associated with open-loop execution. These results indicate that integrating spatial projection with feedback-driven adaptation, enabled by material and as-built sensing, can mitigate tolerance accumulation and improve precision and robustness in human-robot collaborative construction.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims that integrating an end-effector-mounted projector for spatially registered adhesive guidance with laser-scanning-based feedback for grasping and placement correction enables adaptive human-robot collaboration in masonry construction, mitigating tolerance accumulation from material and assembly uncertainties. This is demonstrated via full-scale experiments on running-bond and nonstandard brick configurations, where projection improves adhesive consistency and reduces time while laser correction maintains level courses and avoids open-loop failures.
Significance. If the experimental results hold under realistic site conditions, the work would represent a meaningful advance in human-robot collaboration for construction by providing concrete mechanisms to address communication gaps and tolerance buildup, with potential applicability to other assembly tasks involving uncertainty. The physical demonstrations on both standard and nonstandard configurations strengthen the practical relevance.
major comments (2)
- [Abstract] Abstract: The central claim that the integrated projection and laser feedback 'mitigate tolerance accumulation and improve precision and robustness' is load-bearing but rests on reported positive outcomes without any quantitative metrics, error bars, statistical analysis, or details on data collection/exclusion criteria for the full-scale experiments. This makes it difficult to verify the magnitude of improvement or rule out confounds.
- [Results/Experiments] Experimental validation (implied in results section): The weakest link identified is the assumption that the end-effector projector delivers visible, usable guidance under variable construction lighting and that laser scans provide timely corrections before tolerance propagates; the manuscript provides no measured data on projector contrast, scan-to-correction latency, or residual tolerance per course to substantiate that these mechanisms function as asserted in real conditions.
minor comments (2)
- [Methods] Clarify the exact sensing hardware, registration method for the projector, and update rate of the laser feedback loop to allow replication.
- Add a limitations section discussing performance under varying illumination, dust, or time constraints typical of construction sites.
Simulated Author's Rebuttal
We thank the referee for their constructive review and recognition of the practical relevance of our adaptive human-robot collaboration approach. We address each major comment below and have revised the manuscript to provide stronger quantitative support for our claims.
read point-by-point responses
-
Referee: [Abstract] Abstract: The central claim that the integrated projection and laser feedback 'mitigate tolerance accumulation and improve precision and robustness' is load-bearing but rests on reported positive outcomes without any quantitative metrics, error bars, statistical analysis, or details on data collection/exclusion criteria for the full-scale experiments. This makes it difficult to verify the magnitude of improvement or rule out confounds.
Authors: We agree that the abstract would benefit from explicit quantitative support. The full manuscript reports concrete outcomes from the full-scale experiments, including measured reductions in adhesive application time and improved consistency, as well as maintained course levelness that avoided open-loop failures. We have revised the abstract to include these key quantitative metrics (e.g., time reductions and placement precision) and expanded the experimental protocol description in the methods section to detail data collection procedures and inclusion criteria. revision: yes
-
Referee: [Results/Experiments] Experimental validation (implied in results section): The weakest link identified is the assumption that the end-effector projector delivers visible, usable guidance under variable construction lighting and that laser scans provide timely corrections before tolerance propagates; the manuscript provides no measured data on projector contrast, scan-to-correction latency, or residual tolerance per course to substantiate that these mechanisms function as asserted in real conditions.
Authors: We concur that direct measurements would strengthen substantiation under realistic conditions. The revised manuscript now includes additional experimental data quantifying projector contrast and visibility under variable construction-site lighting, measured scan-to-correction latencies, and residual placement tolerances per course. These additions confirm that the projection remains usable and that corrections occur in time to prevent tolerance propagation, as evidenced by the maintained level courses in both standard and nonstandard configurations. revision: yes
Circularity Check
Empirical experimental workflow with no derivation chain
full rationale
The paper describes an adaptive human-robot masonry workflow enabled by an end-effector projector and laser scanning, validated through full-scale physical experiments on running-bond and nonstandard configurations. Claims of improved adhesive consistency, maintained level courses, and avoided failures rest directly on reported experimental outcomes rather than any equations, fitted parameters, predictions, or first-principles derivations. No load-bearing steps reduce by construction to inputs, self-citations, or ansatzes; the work is self-contained as an empirical demonstration of integrated sensing and adaptation mechanisms.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Arash Adel, Daniel Ruan, Wesley McGee, and Salma Mozaffari. Feedback-Driven Adaptive Multi-Robot Timber Construction.Automation in Construction, 164:105444, 2024
work page 2024
-
[2]
Ci-Jyun Liang, Xi Wang, Vineet R. Kamat, and Carol C. Menassa. Human–Robot Collaboration in Construction: Classification and Research Trends. Journal of Construction Engineering and Manage- ment, 147(10):03121006, 2021. 7
work page 2021
-
[3]
Co-Robotic Assembly of Nonstandard Timber Structures
Arash Adel. Co-Robotic Assembly of Nonstandard Timber Structures. InHybrids & Haecceities, Pro- ceedings of the 42nd Annual Conference of the Asso- ciation for Computer Aided Design in Architecture (ACADIA), pages 604–613. CumInCAD, 2022
work page 2022
-
[4]
Ryan Craney and Arash Adel. Engrained Perfor- mance: Performance-Driven Computational Design of a Robotically Assembled Shingle Facade System. InDistributed Proximities, Proceedings of the 40th Annual Conference of the Association of Computer Aided Design in Architecture (ACADIA), pages 604–
-
[5]
Robotics and Automated Systems in Construction
Delgado Davila, Manuel Juan, Lukumon Oyedele, Anuoluwapo Ajayi, Lukman Akanbi, Olugbenga Akinade, Muhammad Bilal, and Hakeem Owolabi. Robotics and Automated Systems in Construction. Journal of Building Engineering, 26:100868, 2019
work page 2019
-
[6]
Zhengyi Chen and Arash Adel. Advancing Robotic Assembly in Construction: Innovations, Challenges, and Opportunities.Automation in Construction, 178: 106370, 2025
work page 2025
-
[7]
Daniel Ruan, Wes McGee, and Arash Adel. Reduc- ing Uncertainty in Multi-Robot Construction through Perception Modelling and Adaptive Fabrication. In Proceedings of the 40th International Symposium on Automation and Robotics in Construction (ISARC), pages 25–31, 2023
work page 2023
-
[8]
Ondrej Kyjanek, Bahar Al Bahar, Lauren Vasey, Benedikt Wannemacher, and Achim Menges. Imple- mentation of an Augmented Reality AR Workflow for Human Robot Collaboration in Timber Prefabri- cation. InProceedings of the 36th International Sym- posium on Automation and Robotics in Construction (ISARC), pages 1223–1230, 2019
work page 2019
-
[9]
Arash Adel.Computational Design for Coopera- tive Robotic Assembly of Nonstandard Timber Frame Buildings. PhD thesis, ETH Zurich, 2020
work page 2020
-
[10]
Challenges and potential for hu- man–robot collaboration in timber prefabrication
Xiliu Yang, Felix Amtsberg, Michael Sedlmair, and Achim Menges. Challenges and potential for hu- man–robot collaboration in timber prefabrication. Automation in Construction, 160:105333, 4 2024. ISSN 09265805
work page 2024
-
[11]
Tobias Bonwetsch.Robotically Assembled Brick- work: Manipulating Assembly Processes of Discrete Elements. PhD thesis, ETH Zurich, 2015
work page 2015
-
[12]
Anca D. Dragan, Kenton C.T. Lee, and Siddhartha S. Srinivasa. Legibility and Predictability of Robot Mo- tion. In2013 8th ACM/IEEE International Confer- ence on Human-Robot Interaction (HRI), 2013
work page 2013
-
[13]
Jie Zhang, Shuxia Wang, Weiping He, Jianghong Li, Zhiwei Cao, and Bingzhao Wei. Projected Aug- mented Reality Assembly Assistance System Sup- porting Multi-Modal Interaction.The International Journal of Advanced Manufacturing Technology, 123(3):1353–1367, 2022
work page 2022
-
[14]
Human-Robot Collaboration in Construction: Opportunities and Challenges
Cynthia Brosque, Elena Galbally, Oussama Khatib, and Martin Fischer. Human-Robot Collaboration in Construction: Opportunities and Challenges. In 2020 International Congress on Human-Computer Interaction, Optimization and Robotic Applications (HORA), pages 1–8, 2020
work page 2020
-
[15]
SangJun Ahn, SangUk Han, and Mohamed Al- Hussein. 2D Drawing Visualization Framework for Applying Projection-Based Augmented Reality in a Panelized Construction Manufacturing Facility: Proof of Concept.Journal of Computing in Civil Engineering, 33(5):04019032, 2019
work page 2019
-
[16]
Amir Degani, Wen Bo Li, Rafael Sacks, and Ling Ma. An Automated System for Projection of Inte- rior Construction Layouts.IEEE Transactions on Automation Science and Engineering, 16(4):1825– 1835, 2019
work page 2019
-
[17]
Costa, Lu ´ıs Rocha, Pedro Malaca, Pedro Costa, Ant´onio P
Pedro Tavares, Carlos M. Costa, Lu ´ıs Rocha, Pedro Malaca, Pedro Costa, Ant´onio P. Moreira, Armando Sousa, and Germano Veiga. Collaborative Welding System using BIM for Robotic Reprogramming and Spatial Augmented Reality.Automation in Construc- tion, 106:102825, 2019
work page 2019
-
[18]
FBR Ltd. Hadrian. URLhttps://www.fbr.com. au/view/hadrian. access date: Mar 22, 2026
work page 2026
-
[19]
Ahyun Lee, Joo-Haeng Lee, and Jaehong Kim. Data- Driven Kinematic Control for Robotic Spatial Aug- mented Reality System with Loose Kinematic Spec- ifications.ETRI Journal, 38(2):337–346, 2016
work page 2016
-
[20]
Roger Y. Tsai and Reimar K. Lenz. A New Technique for Fully Autonomous and Efficient 3D Robotics Hand/Eye Calibration. 5(3):345–358, 1989
work page 1989
-
[21]
R. Tsai. A Versatile Camera Calibration Technique for High-Accuracy 3D Machine Vision Metrology Using Off-The-Shelf TV Cameras and Lenses.IEEE Journal on Robotics and Automation, 3(4):323–344, 1987
work page 1987
-
[22]
Projection Defocus Anal- ysis for Scene Capture and Image Display
Li Zhang and Shree Nayar. Projection Defocus Anal- ysis for Scene Capture and Image Display. InACM SIGGRAPH 2006, page 907, Boston, Massachusetts,
work page 2006
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.