From Pixels to Newtons: Predicting In Vivo Joint Contact Forces from Monocular Video
Pith reviewed 2026-06-28 02:05 UTC · model grok-4.3
The pith
A physics-free pipeline predicts 3D hip and knee contact forces from ordinary monocular video at accuracy matching subject-specific simulations.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
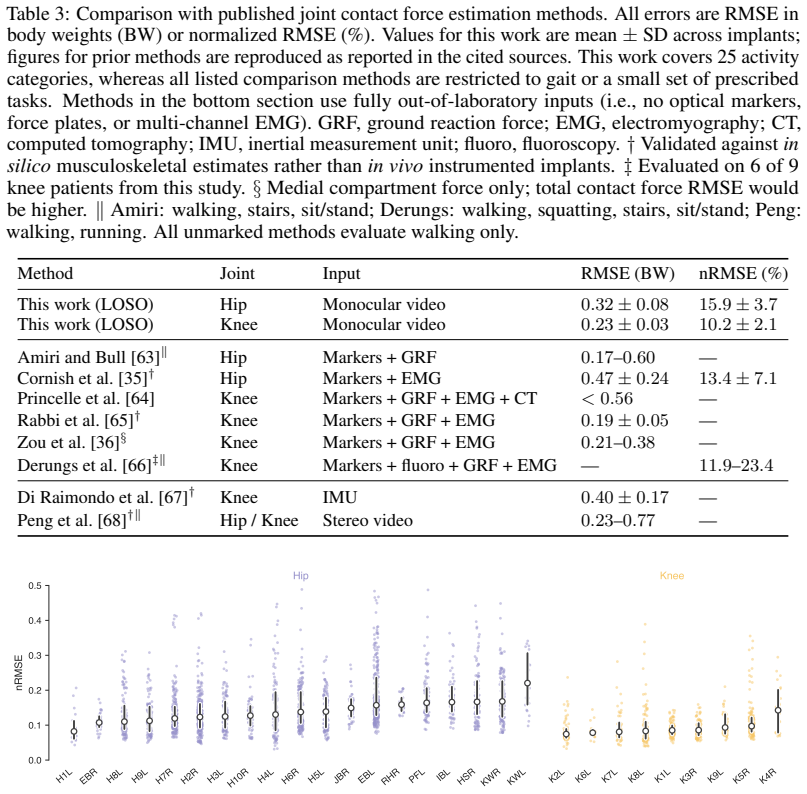
Kinematic features recovered from parametric body meshes per frame, together with adaptive modulation signals from body shape, joint, side, activity text, and V-JEPA 2 video tokens, contain sufficient information for a transformer to decode instantaneous 3D hip and knee contact forces at the accuracy level of subject-specific musculoskeletal simulations, as shown by leave-one-subject-out cross-validation on 26 patients across 25 activity categories.
What carries the argument
The adaptively modulated transformer that takes per-frame kinematic features from parametric body meshes and decodes them into contact forces, with per-layer modulation by body shape, joint, side, activity text, and self-supervised video tokens.
If this is right
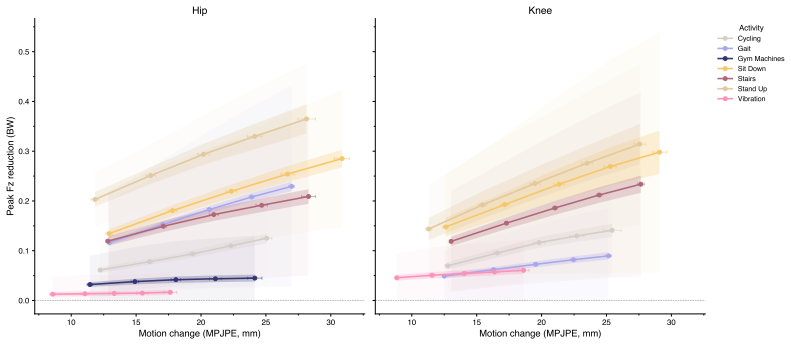
- The pipeline resolves peak force changes smaller than those reported for gait retraining and osteoarthritis progression.
- Zero-shot application to an independent instrumented cohort rivals or outperforms prior published methods.
- Accuracy is preserved when activity labels are removed and only video features are used.
- A generative motion prior driven by the predictor produces biomechanically plausible variants with reduced peak loading.
Where Pith is reading between the lines
- Archived clinical videos could be re-analyzed for historical joint loading patterns without new data collection.
- Smartphone footage might support at-home monitoring of rehabilitation progress or osteoarthritis risk.
- The approach could be tested on broader populations by combining it with existing large video datasets of daily activities.
Load-bearing premise
The kinematic features recovered from parametric body meshes per frame contain sufficient information to decode instantaneous contact forces without any physics-based model or subject-specific calibration.
What would settle it
Simultaneous in vivo force measurements from instrumented implants on new subjects performing activities outside the training distribution, compared directly against the video-based predictions.
Figures





read the original abstract
Joint contact forces govern implant longevity, cartilage health, and rehabilitation outcomes, shaping who develops osteoarthritis, who recovers well from joint replacement, and who benefits from biomechanical interventions. Yet they remain measurable only invasively, in a few dozen patients with instrumented implants. I present a physics-free pipeline to predict instantaneous 3D hip and knee contact forces from an uncalibrated monocular video: no markers, force plates, electromyography, subject-specific imaging, or musculoskeletal model. Parametric body meshes are recovered per frame, encoded as kinematic features, and decoded into forces by a transformer whose pose stream is adaptively modulated at every layer by body shape, joint, side, activity text, and self-supervised video tokens (V-JEPA 2), unifying hip and knee in a single model. Under leave-one-subject-out cross-validation across 26 patients and 25 activity categories from the in vivo OrthoLoad database, the pipeline matches the accuracy of subject-specific musculoskeletal simulations ($0.32 \pm 0.08$ BW RMSE for hip; $0.23 \pm 0.03$ BW for knee) and resolves peak force changes smaller than those reported for gait retraining and osteoarthritis progression. Applied zero-shot to an independent instrumented cohort, it rivals or outperforms prior published methods. Even without curated activity labels, video features alone preserve accuracy and enable end-to-end inference on raw footage. Driven by the predictor, a generative motion prior produces biomechanically plausible variants with reduced peak loading, rediscovering strategies from the predictive simulation literature. This pipeline establishes uncalibrated monocular video as a viable modality for estimating joint loading, opening a path toward retrospective analysis of archived clinical recordings, primary-care screening, and at-home rehabilitation tracking.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents a physics-free pipeline to predict instantaneous 3D hip and knee joint contact forces from uncalibrated monocular video. Parametric body meshes are recovered per frame to extract kinematic features; these are decoded by a transformer whose pose stream is adaptively modulated at every layer by body shape, joint, side, activity text, and V-JEPA 2 tokens. Under leave-one-subject-out cross-validation on 26 patients and 25 activity categories from the OrthoLoad database, the model reports RMSE of 0.32 ± 0.08 BW (hip) and 0.23 ± 0.03 BW (knee), matching subject-specific musculoskeletal simulations. Zero-shot transfer is shown on an independent instrumented cohort, and the predictor is used to drive a generative motion prior that produces variants with reduced peak loading.
Significance. If the central empirical result holds, the work is significant because it establishes monocular video as a viable modality for non-invasive joint-load estimation without markers, force plates, EMG, or subject-specific models. The leave-one-subject-out design across 26 patients and multiple activities, together with explicit zero-shot testing on a separate cohort, supplies credible evidence against overfitting. Credit is due for the unified hip-knee model, the incorporation of self-supervised video tokens, and the downstream generative application that rediscovers known reduced-loading strategies. These elements could support retrospective analysis of clinical recordings and at-home rehabilitation tracking.
major comments (1)
- [Abstract / kinematic encoding] Abstract and kinematic-feature section: The central claim requires that per-frame parametric-mesh kinematics plus the listed modulation signals suffice to decode instantaneous contact forces without any physics-based model or subject-specific calibration. Monocular mesh recovery is known to suffer from depth and scale ambiguities that directly corrupt joint angles and velocities. The manuscript must demonstrate that the reported RMSE is not produced by dataset-specific correlations; an ablation that removes or perturbs individual modulation streams (shape, activity, V-JEPA) or injects controlled kinematic noise would directly test this sufficiency. Absent such evidence, the match to subject-specific MSK simulations remains difficult to interpret.
minor comments (2)
- [Abstract] The abstract states that the pipeline 'resolves peak force changes smaller than those reported for gait retraining'; supply the numerical threshold and the specific literature reference used for comparison.
- [Results / figures] Ensure that all force values are consistently normalized to body weight (BW) in text, tables, and figures; any un-normalized quantities should be explicitly labeled.
Simulated Author's Rebuttal
We thank the referee for their constructive comments. We address the major comment below.
read point-by-point responses
-
Referee: [Abstract / kinematic encoding] Abstract and kinematic-feature section: The central claim requires that per-frame parametric-mesh kinematics plus the listed modulation signals suffice to decode instantaneous contact forces without any physics-based model or subject-specific calibration. Monocular mesh recovery is known to suffer from depth and scale ambiguities that directly corrupt joint angles and velocities. The manuscript must demonstrate that the reported RMSE is not produced by dataset-specific correlations; an ablation that removes or perturbs individual modulation streams (shape, activity, V-JEPA) or injects controlled kinematic noise would directly test this sufficiency. Absent such evidence, the match to subject-specific MSK simulations remains difficult to interpret.
Authors: We appreciate the referee's concern regarding potential depth and scale ambiguities inherent to monocular mesh recovery and the need to rule out dataset-specific correlations. Our model incorporates several mechanisms to address these issues: the adaptive modulation at every transformer layer by body shape parameters helps resolve scale ambiguities, while the V-JEPA 2 tokens, extracted from the raw video, provide additional visual context that is independent of the parametric mesh. The activity text and joint/side embeddings further condition the prediction. Critically, the leave-one-subject-out validation on 26 patients and the zero-shot evaluation on an independent instrumented cohort demonstrate generalization beyond the training distribution, making it unlikely that the performance stems solely from dataset-specific correlations. The fact that the model achieves accuracy comparable to subject-specific musculoskeletal simulations—which explicitly model physics—further supports that it has learned meaningful biomechanical mappings. We agree that targeted ablations, such as removing modulation streams or injecting kinematic noise, would provide additional evidence of sufficiency. We will add these experiments to the revised manuscript. revision: yes
Circularity Check
No circularity; validation is external to fitted values
full rationale
The paper trains a transformer on kinematic features from parametric meshes plus modulation tokens, then evaluates under leave-one-subject-out cross-validation on 26 patients plus zero-shot transfer to a separate instrumented cohort. No equation or step reduces a claimed prediction to a fitted input by construction, no self-citation chain is load-bearing for the central sufficiency claim, and no ansatz or uniqueness theorem is imported from prior author work. The reported RMSE values are therefore not forced by the training procedure itself.
Axiom & Free-Parameter Ledger
free parameters (1)
- Transformer weights and modulation parameters
axioms (1)
- domain assumption Parametric body meshes recovered per frame provide kinematic features that are sufficient for force decoding
Reference graph
Works this paper leans on
-
[1]
Bioinspired technologies to connect musculoskeletal mechanobiology to the person for training and rehabilitation.Frontiers in computational neuroscience, 11:96, 2017
Claudio Pizzolato, David G Lloyd, Rod S Barrett, Jill L Cook, Ming H Zheng, Thor F Besier, and David J Saxby. Bioinspired technologies to connect musculoskeletal mechanobiology to the person for training and rehabilitation.Frontiers in computational neuroscience, 11:96, 2017
2017
-
[2]
Determination of muscle loading at the hip joint for use in pre-clinical testing.Journal of biomechanics, 38(5):1155–1163, 2005
Markus O Heller, Georg Bergmann, J-P Kassi, Lutz Claes, NP Haas, and GN Duda. Determination of muscle loading at the hip joint for use in pre-clinical testing.Journal of biomechanics, 38(5):1155–1163, 2005
2005
-
[3]
Feasibility of personalised hip load modification using real-time biofeedback in hip osteoarthritis: A pilot study.Osteoarthritis and Cartilage Open, 4(1):100230, 2022
Laura E Diamond, Daniel Devaprakash, Bradley Cornish, Melanie L Plinsinga, Andrea Hams, Michelle Hall, Rana S Hinman, Claudio Pizzolato, and David J Saxby. Feasibility of personalised hip load modification using real-time biofeedback in hip osteoarthritis: A pilot study.Osteoarthritis and Cartilage Open, 4(1):100230, 2022
2022
-
[4]
Altered loading in the injured knee after acl rupture.Journal of Orthopaedic Research, 31(3):458–464, 2013
Emily S Gardinier, Kurt Manal, Thomas S Buchanan, and Lynn Snyder-Mackler. Altered loading in the injured knee after acl rupture.Journal of Orthopaedic Research, 31(3):458–464, 2013
2013
-
[5]
Osteoarthritis year in review 2023: biomechanics
Laura E Diamond, Tamara Grant, and Scott D Uhlrich. Osteoarthritis year in review 2023: biomechanics. Osteoarthritis and cartilage, 32(2):138–147, 2024
2023
-
[6]
An implantable telemetry device to measure intra-articular tibial forces.Journal of biomechanics, 38(2): 299–304, 2005
Darryl D D’Lima, Christopher P Townsend, Steven W Arms, Beverly A Morris, and Clifford W Colwell Jr. An implantable telemetry device to measure intra-articular tibial forces.Journal of biomechanics, 38(2): 299–304, 2005
2005
-
[7]
Multichannel strain gauge telemetry for orthopaedic implants.Journal of biomechanics, 21(2):169–176, 1988
G Bergmann, F Graichen, J Siraky, H Jendrzynski, and A Rohlmann. Multichannel strain gauge telemetry for orthopaedic implants.Journal of biomechanics, 21(2):169–176, 1988
1988
-
[8]
Total hip joint prosthesis for in vivo measurement of forces and moments.Medical engineering & physics, 32(1): 95–100, 2010
Philipp Damm, Friedmar Graichen, Antonius Rohlmann, Alwina Bender, and Georg Bergmann. Total hip joint prosthesis for in vivo measurement of forces and moments.Medical engineering & physics, 32(1): 95–100, 2010
2010
-
[9]
Design, calibration and pre-clinical testing of an instrumented tibial tray.Journal of biomechanics, 40:S4–S10, 2007
Bernd Heinlein, Friedmar Graichen, Alwina Bender, Antonius Rohlmann, and Georg Bergmann. Design, calibration and pre-clinical testing of an instrumented tibial tray.Journal of biomechanics, 40:S4–S10, 2007. 22
2007
-
[10]
Tibial forces measured in vivo after total knee arthroplasty.The Journal of arthroplasty, 21(2):255–262, 2006
Darryl D D’lima, Shantanu Patil, Nikolai Steklov, John E Slamin, and Clifford W Colwell Jr. Tibial forces measured in vivo after total knee arthroplasty.The Journal of arthroplasty, 21(2):255–262, 2006
2006
-
[11]
Grand challenge competition to predict in vivo knee loads.Journal of orthopaedic research, 30(4):503–513, 2012
Benjamin J Fregly, Thor F Besier, David G Lloyd, Scott L Delp, Scott A Banks, Marcus G Pandy, and Darryl D D’lima. Grand challenge competition to predict in vivo knee loads.Journal of orthopaedic research, 30(4):503–513, 2012
2012
-
[12]
Complete data of total knee replacement loading for level walking and stair climbing measured in vivo with a follow-up of 6–10 months.Clin Biomech, 24(4):315–326, 2009
Bernd Heinlein, Ines Kutzner, Friedmar Graichen, Alwina Bender, Antonius Rohlmann, Andreas M Halder, Alexander Beier, and Georg Bergmann. Complete data of total knee replacement loading for level walking and stair climbing measured in vivo with a follow-up of 6–10 months.Clin Biomech, 24(4):315–326, 2009
2009
-
[13]
Standardized loads acting in hip implants.PloS one, 11(5):e0155612, 2016
Georg Bergmann, Alwina Bender, Jörn Dymke, Georg Duda, and Philipp Damm. Standardized loads acting in hip implants.PloS one, 11(5):e0155612, 2016
2016
-
[14]
Forces acting on the femoral head-prosthesis: a study on strain gauge supplied prostheses in living persons.Acta Orthopaedica Scandinavica, 37(sup88):1–132, 1966
Nils W Rydell. Forces acting on the femoral head-prosthesis: a study on strain gauge supplied prostheses in living persons.Acta Orthopaedica Scandinavica, 37(sup88):1–132, 1966
1966
-
[15]
In vivo records of hip loads using a femoral implant with telemetric output (a prelimary report).Journal of biomedical engineering, 1(2):111–115, 1979
TA English and M Kilvington. In vivo records of hip loads using a femoral implant with telemetric output (a prelimary report).Journal of biomedical engineering, 1(2):111–115, 1979
1979
-
[16]
In vivo glenohumeral contact forces—measurements in the first patient 7 months postoperatively.Journal of biomechanics, 40 (10):2139–2149, 2007
G Bergmann, F Graichen, A Bender, M Kääb, A Rohlmann, and P Westerhoff. In vivo glenohumeral contact forces—measurements in the first patient 7 months postoperatively.Journal of biomechanics, 40 (10):2139–2149, 2007
2007
-
[17]
On the estimation of hip joint loads through musculoskeletal modeling.Biomechanics and Modeling in Mechanobiology, 22(2):379–400, 2023
Matilde Tomasi, Alessio Artoni, Lorenza Mattei, and Francesca Di Puccio. On the estimation of hip joint loads through musculoskeletal modeling.Biomechanics and Modeling in Mechanobiology, 22(2):379–400, 2023
2023
-
[18]
Full-body musculoskeletal model for muscle-driven simulation of human gait.IEEE transactions on biomedical engineering, 63(10):2068–2079, 2016
Apoorva Rajagopal, Christopher L Dembia, Matthew S DeMers, Denny D Delp, Jennifer L Hicks, and Scott L Delp. Full-body musculoskeletal model for muscle-driven simulation of human gait.IEEE transactions on biomedical engineering, 63(10):2068–2079, 2016
2068
-
[19]
Static and dynamic optimization solutions for gait are practically equivalent.Journal of biomechanics, 34(2):153–161, 2001
Frank C Anderson and Marcus G Pandy. Static and dynamic optimization solutions for gait are practically equivalent.Journal of biomechanics, 34(2):153–161, 2001
2001
-
[20]
An interactive graphics-based model of the lower extremity to study orthopaedic surgical procedures.IEEE Transactions on Biomedical engineering, 37(8):757–767, 1990
Scott L Delp, J Peter Loan, Melissa G Hoy, Felix E Zajac, Eric L Topp, and Joseph M Rosen. An interactive graphics-based model of the lower extremity to study orthopaedic surgical procedures.IEEE Transactions on Biomedical engineering, 37(8):757–767, 1990
1990
-
[21]
Subject-specific musculoskeletal modelling in patients before and after total hip arthroplasty.Computer methods in biomechanics and biomedical engineering, 19(15):1683–1691, 2016
Mariska Wesseling, Friedl De Groote, Christophe Meyer, Kristoff Corten, Jean-Pierre Simon, Kaat Desloovere, and Ilse Jonkers. Subject-specific musculoskeletal modelling in patients before and after total hip arthroplasty.Computer methods in biomechanics and biomedical engineering, 19(15):1683–1691, 2016
2016
-
[22]
Ekaterina Stansfield, Willi Koller, Basílio Gonçalves, and Hans Kainz. Do we need medical imaging- informed musculoskeletal models for simulations in healthy adults? a new workflow based on magnetic resonance imaging highlights the importance of personalized geometry.PLOS Computational Biology, 22 (3):e1014073, 2026
2026
-
[23]
Claudio Pizzolato, David G Lloyd, Massimo Sartori, Elena Ceseracciu, Thor F Besier, Benjamin J Fregly, and Monica Reggiani. Ceinms: A toolbox to investigate the influence of different neural control solutions on the prediction of muscle excitation and joint moments during dynamic motor tasks.Journal of biomechanics, 48(14):3929–3936, 2015
2015
-
[24]
Hybrid neuromusculoskeletal modeling to best track joint moments using a balance between muscle excitations derived from electromyograms and optimization
Massimo Sartori, Dario Farina, and David G Lloyd. Hybrid neuromusculoskeletal modeling to best track joint moments using a balance between muscle excitations derived from electromyograms and optimization. Journal of biomechanics, 47(15):3613–3621, 2014
2014
-
[25]
An emg-driven musculoskeletal model to estimate muscle forces and knee joint moments in vivo.Journal of biomechanics, 36(6):765–776, 2003
David G Lloyd and Thor F Besier. An emg-driven musculoskeletal model to estimate muscle forces and knee joint moments in vivo.Journal of biomechanics, 36(6):765–776, 2003
2003
-
[26]
Uncertainty in muscle–tendon parameters can greatly influence the accuracy of knee contact force estimates of musculoskeletal models
Seyyed Hamed Hosseini Nasab, Colin R Smith, Allan Maas, Alexandra V ollenweider, Jörn Dymke, Pascal Schütz, Philipp Damm, Adam Trepczynski, and William R Taylor. Uncertainty in muscle–tendon parameters can greatly influence the accuracy of knee contact force estimates of musculoskeletal models. Frontiers in Bioengineering and Biotechnology, 10:808027, 2022
2022
-
[27]
Florent Moissenet, Luca Modenese, and Raphaël Dumas. Alterations of musculoskeletal models for a more accurate estimation of lower limb joint contact forces during normal gait: a systematic review.Journal of biomechanics, 63:8–20, 2017. 23
2017
-
[28]
Neural localizer fields for continuous 3d human pose and shape estimation.Advances in Neural Information Processing Systems, 37:140032–140065, 2024
István Sárándi and Gerard Pons-Moll. Neural localizer fields for continuous 3d human pose and shape estimation.Advances in Neural Information Processing Systems, 37:140032–140065, 2024
2024
-
[29]
Prompthmr: Promptable human mesh recovery
Yufu Wang, Yu Sun, Priyanka Patel, Kostas Daniilidis, Michael J Black, and Muhammed Kocabas. Prompthmr: Promptable human mesh recovery. InProceedings of the computer vision and pattern recognition conference, pages 1148–1159, 2025
2025
-
[30]
Sam 3d body: Robust full-body human mesh recovery
Xitong Yang, Devansh Kukreja, Don Pinkus, Anushka Sagar, Taosha Fan, Jinhyung Park, Soyong Shin, Jinkun Cao, Jiawei Liu, Nicolas Ugrinovic, et al. Sam 3d body: Robust full-body human mesh recovery. arXiv preprint arXiv:2602.15989, 2026
-
[31]
Integrating machine learning with musculoskeletal simulation improves opencap video-based dynamics estimation.bioRxiv, pages 2025–12, 2025
Emily Y Miller, Tian Tan, Antoine Falisse, and Scott D Uhlrich. Integrating machine learning with musculoskeletal simulation improves opencap video-based dynamics estimation.bioRxiv, pages 2025–12, 2025
2025
-
[32]
Selim Gilon, Emily Y Miller, and Scott D Uhlrich. Opencap monocular: 3d human kinematics and musculoskeletal dynamics from a single smartphone video.arXiv preprint arXiv:2603.24733, 2026
-
[33]
Opencap: Human movement dynamics from smartphone videos.PLoS computational biology, 19(10):e1011462, 2023
Scott D Uhlrich, Antoine Falisse, Łukasz Kidzi ´nski, Julie Muccini, Michael Ko, Akshay S Chaudhari, Jennifer L Hicks, and Scott L Delp. Opencap: Human movement dynamics from smartphone videos.PLoS computational biology, 19(10):e1011462, 2023
2023
-
[34]
Estimation of knee joint forces in sport movements using wearable sensors and machine learning.Sensors, 19(17):3690, 2019
Bernd J Stetter, Steffen Ringhof, Frieder C Krafft, Stefan Sell, and Thorsten Stein. Estimation of knee joint forces in sport movements using wearable sensors and machine learning.Sensors, 19(17):3690, 2019
2019
-
[35]
Bradley M Cornish, Claudio Pizzolato, David J Saxby, Zhengliang Xia, Daniel Devaprakash, and Laura E Diamond. Hip contact forces can be predicted with a neural network using only synthesised key points and electromyography in people with hip osteoarthritis.Osteoarthritis and Cartilage, 32(6):730–739, 2024
2024
-
[36]
Prediction of medial knee contact force using multisource fusion recurrent neural network and transfer learning.Medical & Biological Engineering & Computing, 62(5):1333–1346, 2024
Jianjun Zou, Xiaogang Zhang, Yali Zhang, and Zhongmin Jin. Prediction of medial knee contact force using multisource fusion recurrent neural network and transfer learning.Medical & Biological Engineering & Computing, 62(5):1333–1346, 2024
2024
-
[37]
Tianxiao Chen, Zhifeng Zhou, Datao Xu, Yi Yuan, Huiyu Zhou, Qincheng Ge, Tianle Jie, Meizi Wang, Liangliang Xiang, Gusztáv Fekete, et al. Ai-powered biomechanical modeling for acl-reconstructed knees: predicting knee joint contact forces via computer vision and deep learning.Journal of NeuroEngineering and Rehabilitation, 2026
2026
-
[38]
OrthoLoad
Georg Bergmann and Philipp Damm. OrthoLoad. https://orthoload.com, 2008. Editors. Retrieved January 3, 2026
2008
-
[39]
V-JEPA 2: Self-Supervised Video Models Enable Understanding, Prediction and Planning
Mido Assran, Adrien Bardes, David Fan, Quentin Garrido, Russell Howes, Matthew Muckley, Ammar Rizvi, Claire Roberts, Koustuv Sinha, Artem Zholus, et al. V-jepa 2: Self-supervised video models enable understanding, prediction and planning.arXiv preprint arXiv:2506.09985, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[40]
Smpl: A skinned multi-person linear model
Matthew Loper, Naureen Mahmood, Javier Romero, Gerard Pons-Moll, and Michael J Black. Smpl: A skinned multi-person linear model. InSeminal Graphics Papers: Pushing the Boundaries, Volume 2, pages 851–866. ACM, 2023
2023
-
[41]
SAM 3: Segment Anything with Concepts
Nicolas Carion, Laura Gustafson, Yuan-Ting Hu, Shoubhik Debnath, Ronghang Hu, Didac Suris, Chaitanya Ryali, Kalyan Vasudev Alwala, Haitham Khedr, Andrew Huang, et al. Sam 3: Segment anything with concepts.arXiv preprint arXiv:2511.16719, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[42]
Depth Anything 3: Recovering the Visual Space from Any Views
Haotong Lin, Sili Chen, Junhao Liew, Donny Y Chen, Zhenyu Li, Guang Shi, Jiashi Feng, and Bingyi Kang. Depth anything 3: Recovering the visual space from any views.arXiv preprint arXiv:2511.10647, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[43]
Multi-track timeline control for text-driven 3d human motion generation
Mathis Petrovich, Or Litany, Umar Iqbal, Michael J Black, Gul Varol, Xue Bin Peng, and Davis Rempe. Multi-track timeline control for text-driven 3d human motion generation. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 1911–1921, 2024
1911
-
[44]
On the continuity of rotation represen- tations in neural networks
Yi Zhou, Connelly Barnes, Jingwan Lu, Jimei Yang, and Hao Li. On the continuity of rotation represen- tations in neural networks. InProceedings of the IEEE/CVF conference on computer vision and pattern recognition, pages 5745–5753, 2019
2019
-
[45]
Rotary position embedding for vision transformer
Byeongho Heo, Song Park, Dongyoon Han, and Sangdoo Yun. Rotary position embedding for vision transformer. InEuropean Conference on Computer Vision, pages 289–305. Springer, 2024. 24
2024
-
[46]
Scalable diffusion models with transformers
William Peebles and Saining Xie. Scalable diffusion models with transformers. InProceedings of the IEEE/CVF international conference on computer vision, pages 4195–4205, 2023
2023
-
[47]
Maximilian Seitzer, Arash Tavakoli, Dimitrije Antic, and Georg Martius. On the pitfalls of heteroscedastic uncertainty estimation with probabilistic neural networks.arXiv preprint arXiv:2203.09168, 2022
-
[48]
Decoupled Weight Decay Regularization
Ilya Loshchilov and Frank Hutter. Decoupled weight decay regularization.arXiv preprint arXiv:1711.05101, 2017
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[49]
Evaluating and calibrating uncertainty prediction in regression tasks.Sensors, 22(15):5540, 2022
Dan Levi, Liran Gispan, Niv Giladi, and Ethan Fetaya. Evaluating and calibrating uncertainty prediction in regression tasks.Sensors, 22(15):5540, 2022
2022
-
[50]
Flow Matching for Generative Modeling
Yaron Lipman, Ricky TQ Chen, Heli Ben-Hamu, Maximilian Nickel, and Matt Le. Flow matching for generative modeling.arXiv preprint arXiv:2210.02747, 2022
work page internal anchor Pith review Pith/arXiv arXiv 2022
-
[51]
Flow Straight and Fast: Learning to Generate and Transfer Data with Rectified Flow
Xingchao Liu, Chengyue Gong, and Qiang Liu. Flow straight and fast: Learning to generate and transfer data with rectified flow.arXiv preprint arXiv:2209.03003, 2022
work page internal anchor Pith review Pith/arXiv arXiv 2022
-
[52]
SDEdit: Guided Image Synthesis and Editing with Stochastic Differential Equations
Chenlin Meng, Yutong He, Yang Song, Jiaming Song, Jiajun Wu, Jun-Yan Zhu, and Stefano Ermon. Sdedit: Guided image synthesis and editing with stochastic differential equations.arXiv preprint arXiv:2108.01073, 2021
work page internal anchor Pith review Pith/arXiv arXiv 2021
-
[53]
Diffusion Posterior Sampling for General Noisy Inverse Problems
Hyungjin Chung, Jeongsol Kim, Michael T Mccann, Marc L Klasky, and Jong Chul Ye. Diffusion posterior sampling for general noisy inverse problems.arXiv preprint arXiv:2209.14687, 2022
work page internal anchor Pith review Pith/arXiv arXiv 2022
-
[54]
Phil DB Price, Conor Gissane, and Daniel J Cleather. Reliability and minimal detectable change values for predictions of knee forces during gait and stair ascent derived from the freebody musculoskeletal model of the lower limb.Frontiers in bioengineering and biotechnology, 5:74, 2017
2017
-
[55]
Quantifying test-retest reliability using the intraclass correlation coefficient and the sem
Joseph P Weir. Quantifying test-retest reliability using the intraclass correlation coefficient and the sem. The Journal of Strength & Conditioning Research, 19(1):231–240, 2005
2005
-
[56]
Amass: Archive of motion capture as surface shapes
Naureen Mahmood, Nima Ghorbani, Nikolaus F Troje, Gerard Pons-Moll, and Michael J Black. Amass: Archive of motion capture as surface shapes. InProceedings of the IEEE/CVF international conference on computer vision, pages 5442–5451, 2019
2019
-
[57]
LE Diamond, HX Hoang, RS Barrett, A Loureiro, M Constantinou, DG Lloyd, and C Pizzolato. Individuals with mild-to-moderate hip osteoarthritis walk with lower hip joint contact forces despite higher levels of muscle co-contraction compared to healthy individuals.Osteoarthritis and Cartilage, 28(7):924–931, 2020
2020
-
[58]
The biomechanical fingerprint of hip and knee osteoarthritis patients during activities of daily living.Clinical Biomechanics, 101:105858, 2023
Sam Van Rossom, Jill Emmerzaal, Rob van der Straaten, Mariska Wesseling, Kristoff Corten, Johan Belle- mans, Jan Truijen, Jan Malcorps, Annick Timmermans, Benedicte Vanwanseele, et al. The biomechanical fingerprint of hip and knee osteoarthritis patients during activities of daily living.Clinical Biomechanics, 101:105858, 2023
2023
-
[59]
Simulated hip abductor strengthening reduces peak joint contact forces in patients with total hip arthroplasty.Journal of biomechanics, 93:18–27, 2019
Casey A Myers, Peter J Laz, Kevin B Shelburne, Dana L Judd, Joshua D Winters, Jennifer E Stevens- Lapsley, and Bradley S Davidson. Simulated hip abductor strengthening reduces peak joint contact forces in patients with total hip arthroplasty.Journal of biomechanics, 93:18–27, 2019
2019
-
[60]
High tibiofemoral contact and muscle forces during gait are associated with radiographic knee oa progression over 3 years.The knee, 41:245–256, 2023
Pouya Amiri, Elysia M Davis, Jereme Outerleys, Ross H Miller, Scott Brandon, and Janie L Astephen Wilson. High tibiofemoral contact and muscle forces during gait are associated with radiographic knee oa progression over 3 years.The knee, 41:245–256, 2023
2023
-
[61]
Minimum detectable change for knee joint contact force estimates using an emg-driven model.Gait & posture, 38(4):1051–1053, 2013
Emily S Gardinier, Kurt Manal, Thomas S Buchanan, and Lynn Snyder-Mackler. Minimum detectable change for knee joint contact force estimates using an emg-driven model.Gait & posture, 38(4):1051–1053, 2013
2013
-
[62]
Muscle coordination retraining inspired by musculoskeletal simulations reduces knee contact force.Scientific reports, 12(1): 9842, 2022
Scott D Uhlrich, Rachel W Jackson, Ajay Seth, Julie A Kolesar, and Scott L Delp. Muscle coordination retraining inspired by musculoskeletal simulations reduces knee contact force.Scientific reports, 12(1): 9842, 2022
2022
-
[63]
Pouya Amiri and Anthony MJ Bull. Prediction of in vivo hip contact forces during common activities of daily living using a segment-based musculoskeletal model.Frontiers in Bioengineering and Biotechnology, 10:995279, 2022
2022
-
[64]
Emg-informed neuromusculoskeletal simula- tions increase the accuracy of the estimation of knee joint contact forces during sub-optimal level walking
Domitille Princelle, Marco Viceconti, and Giorgio Davico. Emg-informed neuromusculoskeletal simula- tions increase the accuracy of the estimation of knee joint contact forces during sub-optimal level walking. Annals of Biomedical Engineering, 53(6):1399–1408, 2025. 25
2025
-
[65]
Mohammad Fazle Rabbi, Giorgio Davico, David G Lloyd, Christopher P Carty, Laura E Diamond, and Claudio Pizzolato. Muscle synergy-informed neuromusculoskeletal modelling to estimate knee contact forces in children with cerebral palsy.Biomechanics and Modeling in Mechanobiology, 23(3):1077–1090, 2024
2024
-
[66]
Machine learning-based estimation of knee joint mechanics from kinematic and neuromuscular inputs: A proof-of-concept using the cams-knee datasets
Yara N Derungs, Martin Bertsch, Kushal Malla, Allan Maas, Thomas M Grupp, Adam Trepczynski, Philipp Damm, and Seyyed Hamed Hosseini Nasab. Machine learning-based estimation of knee joint mechanics from kinematic and neuromuscular inputs: A proof-of-concept using the cams-knee datasets. Bioengineering, 13(2):173, 2026
2026
-
[67]
Giacomo Di Raimondo, Miel Willems, Bryce Adrian Killen, Sara Havashinezhadian, Katia Turcot, Benedicte Vanwanseele, and Ilse Jonkers. Peak tibiofemoral contact forces estimated using imu-based approaches are not significantly different from motion capture-based estimations in patients with knee osteoarthritis.Sensors, 23(9):4484, 2023
2023
-
[68]
Yinghu Peng, Wei Wang, Lin Wang, Hao Zhou, Zhenxian Chen, Qida Zhang, and Guanglin Li. Smartphone videos-driven musculoskeletal multibody dynamics modelling workflow to estimate the lower limb joint contact forces and ground reaction forces.Medical & Biological Engineering & Computing, 62(12): 3841–3853, 2024
2024
-
[69]
Co-simulation of neuromuscular dynamics and knee mechanics during human walking.Journal of biomechanical engineering, 136(2):021033, 2014
Darryl G Thelen, Kwang Won Choi, and Anne M Schmitz. Co-simulation of neuromuscular dynamics and knee mechanics during human walking.Journal of biomechanical engineering, 136(2):021033, 2014
2014
-
[70]
Effect of joint center location on in-vivo joint contact forces during walking
Yoon-Hyuk Kim, Won-Man Park, and Bui Thi Thanh Phuong. Effect of joint center location on in-vivo joint contact forces during walking. InSummer Bioengineering Conference, volume 44038, pages 267–268. American Society of Mechanical Engineers, 2010
2010
-
[71]
Dual-joint modeling for estimation of total knee replacement contact forces during locomotion.Journal of biomechanical engineering, 135(2):021013, 2013
Michael W Hast and Stephen J Piazza. Dual-joint modeling for estimation of total knee replacement contact forces during locomotion.Journal of biomechanical engineering, 135(2):021013, 2013
2013
-
[72]
Predictions of condylar contact during normal and medial thrust gait
Kurt Manal and Thomas S Buchanan. Predictions of condylar contact during normal and medial thrust gait. InSummer Bioengineering Conference, volume 44809, pages 197–198. American Society of Mechanical Engineers, 2012
2012
-
[73]
Grand challenge competition: A parametric numerical model to predict in vivo medial and lateral knee forces in walking gaits
Christopher B Knowlton, Markus A Wimmer, and Hannah J Lundberg. Grand challenge competition: A parametric numerical model to predict in vivo medial and lateral knee forces in walking gaits. InSummer Bioengineering Conference, volume 44809, pages 199–200. American Society of Mechanical Engineers, 2012
2012
-
[74]
A subject-specific musculoskeletal modeling framework to predict in vivo mechanics of total knee arthroplasty.Journal of biomechanical engineering, 137(2):020904, 2015
Marco A Marra, Valentine Vanheule, René Fluit, Bart HFJM Koopman, John Rasmussen, Nico Verdonschot, and Michael S Andersen. A subject-specific musculoskeletal modeling framework to predict in vivo mechanics of total knee arthroplasty.Journal of biomechanical engineering, 137(2):020904, 2015
2015
-
[75]
Yihwan Jung, Cong-Bo Phan, and Seungbum Koo. Intra-articular knee contact force estimation dur- ing walking using force-reaction elements and subject-specific joint model.Journal of biomechanical engineering, 138(2):021016, 2016
2016
-
[76]
A planar neuromuscular controller to simulate compensation strategies in the sit-to-walk movement.PLoS one, 19(6):e0305328, 2024
Eline van der Kruk and Thomas Geijtenbeek. A planar neuromuscular controller to simulate compensation strategies in the sit-to-walk movement.PLoS one, 19(6):e0305328, 2024
2024
-
[77]
Altered control strategy between leading and trailing leg increases knee adduction moment in the elderly while descending stairs.Journal of biomechanics, 44(4): 706–711, 2011
Kiros Karamanidis and Adamantios Arampatzis. Altered control strategy between leading and trailing leg increases knee adduction moment in the elderly while descending stairs.Journal of biomechanics, 44(4): 706–711, 2011
2011
-
[78]
Effects of body positions on the saddle on pedalling technique for cyclists and triathletes.European journal of sport science, 14(sup1): S413–S420, 2014
Rodrigo Rico Bini, Patria A Hume, Fabio J Lanferdini, and Marco A Vaz. Effects of body positions on the saddle on pedalling technique for cyclists and triathletes.European journal of sport science, 14(sup1): S413–S420, 2014
2014
-
[79]
Early quadriceps strength loss after total knee arthroplasty: the contributions of muscle atrophy and failure of voluntary muscle activation.JBJS, 87(5):1047–1053, 2005
Ryan L Mizner, Stephanie C Petterson, Jennifer E Stevens, Krista Vandenborne, and Lynn Snyder-Mackler. Early quadriceps strength loss after total knee arthroplasty: the contributions of muscle atrophy and failure of voluntary muscle activation.JBJS, 87(5):1047–1053, 2005
2005
-
[80]
Balance sheets of knee and functional scores 5 years after total knee arthroplasty for osteoarthritis: a source for patient information
Achim König, Markus Walther, Stephan Kirschner, and Frank Gohlke. Balance sheets of knee and functional scores 5 years after total knee arthroplasty for osteoarthritis: a source for patient information. The Journal of arthroplasty, 15(3):289–294, 2000. 26 A Supplementary Material This supplementary material provides per-activity, per-implant breakdowns of...
2000
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.