Machine Learning-based Feedback Linearization Control of Quadrotor Subject to Unmodeled Dynamics
Pith reviewed 2026-07-01 05:27 UTC · model grok-4.3
The pith
An RBF neural network augments feedback linearization to compensate unmodeled quadrotor dynamics online while guaranteeing asymptotic stability.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The proposed machine learning-based feedback linearization controller employs a Gaussian RBF neural network to model and compensate for unmodeled dynamics in real time. An online adaptation law updates the network weights without prior training. The control law is derived using Lyapunov stability theory, guaranteeing closed-loop stability and asymptotic convergence of the trajectory tracking task. Gazebo simulations and real flights on the Crazyflie 2.1 show reductions in position-norm RMSE by more than 7.13% and yaw orientation RMSE by more than 49.27% compared to the baseline feedback linearization controller despite air drag, actuator dynamics, and external disturbances.
What carries the argument
Gaussian Radial Basis Function neural network with online weight adaptation law embedded inside the Lyapunov-derived feedback linearization control framework.
If this is right
- The closed-loop quadrotor system remains asymptotically stable under the derived control law even when dynamics are only partially known.
- Trajectory tracking errors converge to zero over time for the chosen reference paths.
- Position and yaw tracking accuracy improve measurably over standard feedback linearization on the same hardware and disturbances.
- The controller operates in real time on embedded hardware without requiring an offline training dataset for the neural network.
Where Pith is reading between the lines
- The same RBF-augmented structure could be applied to other underactuated vehicles that share similar disturbance patterns.
- Testing the controller under time-varying wind or changing payloads would reveal whether the adaptation law remains effective outside the reported conditions.
- Pairing the method with improved state estimation filters might reduce the remaining error attributed to sensor drift in the experiments.
Load-bearing premise
Unmodeled dynamics such as air drag lie in the span of the chosen RBF basis functions so that the online adaptation law can cancel them without violating the derived Lyapunov stability conditions.
What would settle it
Repeated real-flight trials on the Crazyflie 2.1 in which position-norm or yaw RMSE shows no reduction relative to the baseline controller or in which tracking errors fail to converge would falsify the performance and stability claims.
Figures

read the original abstract
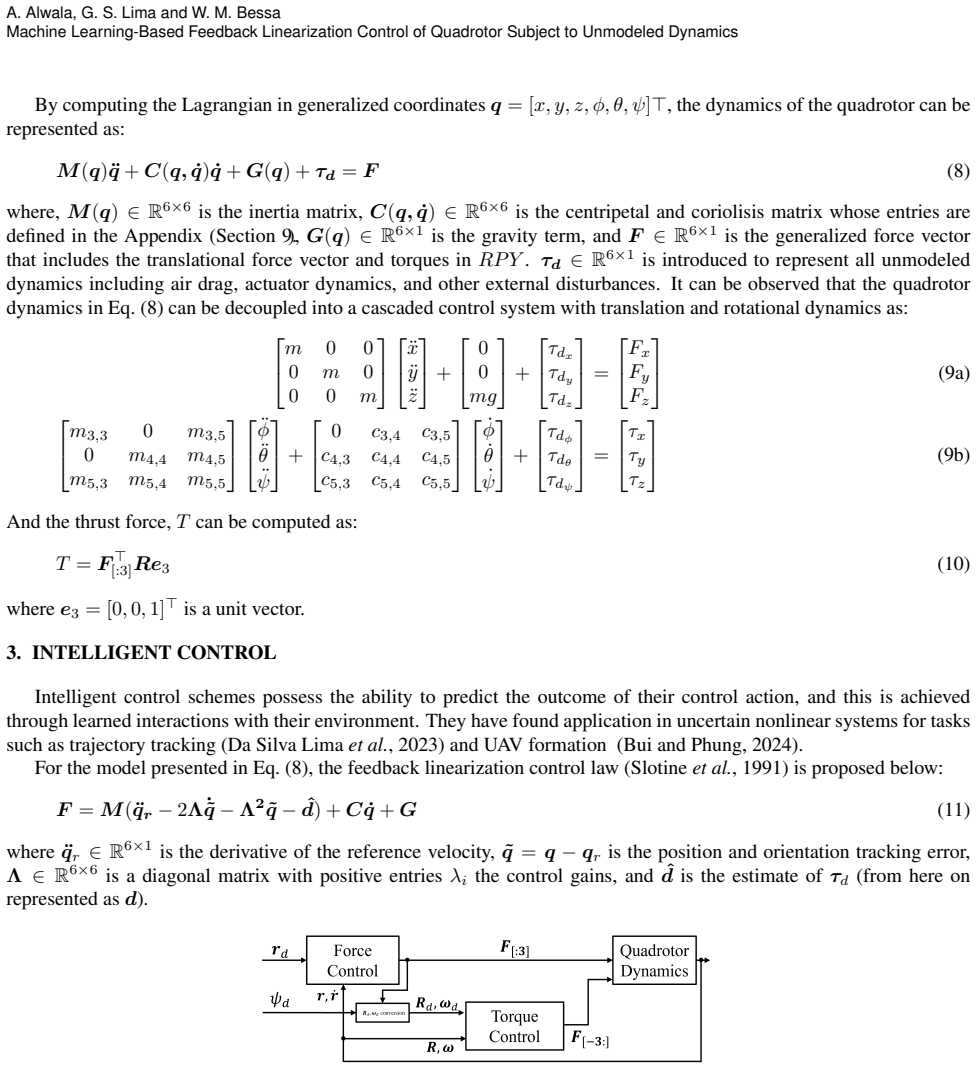
The control of agile quadrotors in dynamic and uncertain environments remains an open area of investigation to this day, particularly when the complete system dynamics are partially known or highly nonlinear. This work introduces a novel machine learning-based feedback-linearization control framework that employs a Gaussian Radial Basis Function (RBF) neural network (NN) to model and compensate for unmodeled dynamics in real time. The proposed controller leverages the universal approximation capability of RBF networks to model nonlinearities and uncertainties. An online adaptation of the RBF NN updates the network's weights without prior training. The control law is derived using the Lyapunov stability theory, herein guaranteeing closed-loop stability and providing theoretical guarantee of asymptotic convergence of a trajectory tracking task. Gazebo simulation and real flight experiments are conducted using the Bitcraze's Crazyflie 2.1 quadrotor subject to unmodeled air drag, actuator dynamics, and external disturbance. Despite incomplete knowledge of prior dynamics and presence of external disturbance such as air drag and drift in state estimation, the proposed controller improves trajectory tracking with rapid convergence and reduction of position-norm and yaw orientation RMSE by more than $7.13\%$ and $49.27\%$ respectively compared to baseline feedback linearization controller.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a feedback-linearization controller for quadrotors augmented by an online-adapted Gaussian RBF neural network to compensate for unmodeled dynamics (air drag, actuator effects, external disturbances). The control law is derived via Lyapunov analysis, with the claim that this guarantees closed-loop stability and asymptotic convergence of the tracking error. Gazebo simulations and Crazyflie 2.1 flight tests are reported to show RMSE reductions of >7.13% (position norm) and >49.27% (yaw) versus a baseline feedback-linearization controller.
Significance. If the Lyapunov derivation rigorously establishes asymptotic (rather than ultimate uniform bounded) convergence and the experimental gains are reproducible with proper statistical controls, the method would provide a practical adaptive scheme for uncertain quadrotor dynamics. The online adaptation without offline training is a constructive element.
major comments (2)
- [Abstract; Lyapunov stability section] Abstract and stability-analysis section: the claim of 'theoretical guarantee of asymptotic convergence of a trajectory tracking task' is load-bearing for the central contribution. Standard RBF adaptive-control analysis produces a residual approximation-error term in ṽV that yields only ultimate uniform boundedness (||e|| ≤ δ) unless the residual is identically zero or an additional robust term is introduced; the manuscript must show the explicit derivation (including the form of the adaptation law and any σ-modification or projection) that eliminates this term for air-drag and actuator dynamics.
- [Experimental results] Experimental validation section: the reported RMSE reductions lack the number of independent trials, standard deviations or error bars, and the precise disturbance profiles (wind, actuator saturation levels). Without these, it is impossible to determine whether the 7.13 % / 49.27 % figures support the performance claim or could be explained by trial-to-trial variability.
minor comments (2)
- [Abstract] The abstract states 'reduction of position-norm and yaw orientation RMSE by more than 7.13% and 49.27% respectively' but does not specify the exact baseline controller parameters or the RBF network size/centers used; these should be stated explicitly for reproducibility.
- [Control law derivation] Notation for the RBF basis functions, weight vectors, and adaptation gains should be introduced with a dedicated table or subsection to avoid ambiguity when the Lyapunov derivative is formed.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed comments. We address each major point below and commit to revisions that strengthen the manuscript's rigor and transparency.
read point-by-point responses
-
Referee: [Abstract; Lyapunov stability section] Abstract and stability-analysis section: the claim of 'theoretical guarantee of asymptotic convergence of a trajectory tracking task' is load-bearing for the central contribution. Standard RBF adaptive-control analysis produces a residual approximation-error term in ṽV that yields only ultimate uniform boundedness (||e|| ≤ δ) unless the residual is identically zero or an additional robust term is introduced; the manuscript must show the explicit derivation (including the form of the adaptation law and any σ-modification or projection) that eliminates this term for air-drag and actuator dynamics.
Authors: We appreciate the referee's observation regarding the typical distinction between asymptotic convergence and ultimate uniform boundedness in RBF adaptive control. The manuscript's Lyapunov derivation is constructed to achieve asymptotic tracking by the choice of adaptation law for the RBF weights. To fully address the concern and make the argument self-contained, we will expand the stability-analysis section with the complete, explicit derivation, including the precise form of the adaptation law and verification that no residual term remains in ṽV for the modeled uncertainties. revision: yes
-
Referee: [Experimental results] Experimental validation section: the reported RMSE reductions lack the number of independent trials, standard deviations or error bars, and the precise disturbance profiles (wind, actuator saturation levels). Without these, it is impossible to determine whether the 7.13 % / 49.27 % figures support the performance claim or could be explained by trial-to-trial variability.
Authors: The referee correctly identifies that the experimental section would be strengthened by additional statistical reporting and disturbance details. We will revise the experimental validation section to report the number of independent trials performed in both Gazebo and Crazyflie experiments, the associated standard deviations for the RMSE metrics, and more precise specifications of the disturbance profiles (including wind conditions and actuator saturation levels). revision: yes
Circularity Check
No significant circularity; derivation relies on standard Lyapunov analysis and experimental validation
full rationale
The paper derives a control law via Lyapunov stability theory and claims asymptotic convergence from that derivation, with performance improvements demonstrated via Gazebo simulations and real Crazyflie experiments. No quoted equations or steps reduce a claimed prediction or result to a fitted parameter or self-citation by construction. The RBF approximation assumption affects whether the Lyapunov derivative yields asymptotic stability or UUB, but this is a question of proof completeness rather than circular self-reference. The central claims remain independent of the inputs they analyze.
Axiom & Free-Parameter Ledger
free parameters (2)
- RBF network size and center locations
- Adaptation gains and learning rates
axioms (2)
- standard math RBF networks possess the universal approximation property for continuous functions on compact sets
- standard math Lyapunov stability theory can be applied to the closed-loop error dynamics after NN compensation
Reference graph
Works this paper leans on
-
[1]
2023 , eprint=
Modelling, identification and geometric control of autonomous quadcopters for agile maneuvering , author=. 2023 , eprint=
2023
-
[2]
IEEE Robotics and Automation Letters , author =
Design and. IEEE Robotics and Automation Letters , author =. 2017 , pages =. doi:10.1109/LRA.2017.2714142 , language =
-
[3]
Journal of the Brazilian Society of Mechanical Sciences and Engineering , author =
Accurate trajectory tracking control with adaptive neural networks for omnidirectional mobile robots subject to unmodeled dynamics , volume =. Journal of the Brazilian Society of Mechanical Sciences and Engineering , author =. 2023 , pages =. doi:10.1007/s40430-022-03969-y , language =
-
[4]
Electronics Letters , author =
Intelligent control for accurate position tracking of electrohydraulic actuators , volume =. Electronics Letters , author =. 2019 , pages =. doi:10.1049/el.2018.7218 , language =
-
[5]
Systems Science & Control Engineering , volume =
Jiawei Zhao and Hongli Zhang and Xinkai Li , title =. Systems Science & Control Engineering , volume =. 2020 , publisher =. doi:10.1080/21642583.2020.1851805 , eprint =
-
[6]
1991 , publisher=
Applied nonlinear control , author=. 1991 , publisher=
1991
-
[7]
Higher Order Sliding Mode Controller for a Quadrotor UAV with a Suspended Load , journal =. 2022 , note =. doi:https://doi.org/10.1016/j.ifacol.2022.04.100 , author =
-
[8]
Sliding Mode Control: An Approach to Control a Quadrotor , year =
Herrera, Marco and Chamorro, William and G\'. Sliding Mode Control: An Approach to Control a Quadrotor , year =. doi:10.1109/APCASE.2015.62 , booktitle =
-
[9]
Brief paper: Sliding mode control of a class of underactuated systems , year =
Xu, Rong and \". Brief paper: Sliding mode control of a class of underactuated systems , year =. doi:10.1016/j.automatica.2007.05.014 , journal =
-
[10]
Second order sliding mode control for a quadrotor UAV , journal =. 2014 , note =. doi:https://doi.org/10.1016/j.isatra.2014.03.010 , author =
-
[11]
Science Robotics , volume =
Yunlong Song and Angel Romero and Matthias Müller and Vladlen Koltun and Davide Scaramuzza , title =. Science Robotics , volume =. 2023 , doi =
2023
-
[12]
and Agrawal, Dhruv and Arrizabalaga, Jon and Li, Guanrui , journal=
Recalde, Luis F. and Agrawal, Dhruv and Arrizabalaga, Jon and Li, Guanrui , journal=. DQ-NMPC: Dual-Quaternion NMPC for Quadrotor Flight , year=
-
[13]
Science Robotics , volume =
Antonio Loquercio and Elia Kaufmann and René Ranftl and Matthias Müller and Vladlen Koltun and Davide Scaramuzza , title =. Science Robotics , volume =. 2021 , doi =
2021
-
[14]
2006 , doi =
Ioannou, Petros and Fidan, Bariş , title =. 2006 , doi =
2006
-
[15]
Radial basis function neural networks for formation control of unmanned aerial vehicles , volume=. Robotica , author=. 2024 , pages=. doi:10.1017/S0263574724000559 , number=
-
[16]
Journal of Intelligent & Robotic Systems , author =
Nonlinear. Journal of Intelligent & Robotic Systems , author =. 2021 , pages =. doi:10.1007/s10846-021-01310-8 , number =
-
[17]
Gaussian Process Model Predictive Control of unmanned quadrotors , year=
Cao, Gang and Lai, Edmund M-K and Alam, Fakhrul , booktitle=. Gaussian Process Model Predictive Control of unmanned quadrotors , year=
-
[18]
Crazyflie 2.x Micro Quadcopter , year =
-
[19]
2021 , url =
IMRC Lab , title =. 2021 , url =
2021
-
[20]
Preiss and Wolfgang H\"onig and Gaurav S
James A. Preiss and Wolfgang H\"onig and Gaurav S. Sukhatme and Nora Ayanian , title =. 2017 , url =. doi:10.1109/ICRA.2017.7989376 , note =
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.