Robust synchronization for multi-agent systems governed by PDEs with observable and unobservable disturbances
Pith reviewed 2026-05-20 03:50 UTC · model grok-4.3
The pith
A disturbance observer and distributed controllers achieve robust synchronization for multi-agent parabolic PDE systems using only boundary measurements.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
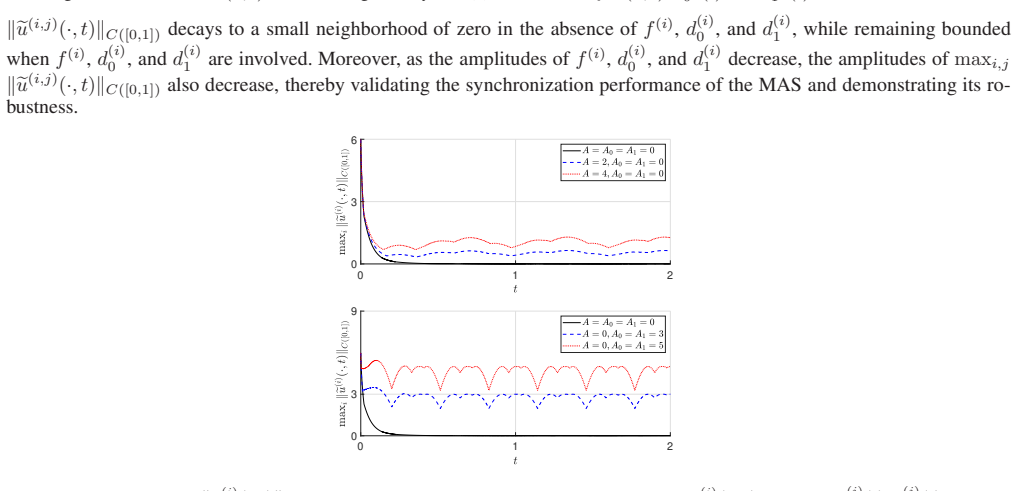
Using only boundary output measurements, a disturbance observer is designed to estimate observable Dirichlet boundary disturbances while ensuring robustness of the observer error system with unobservable disturbances occurring in the domain. Distributed synchronization controllers are then constructed from the reference signal and local output information to enable all agents to track the reference trajectory. Exponential tracking is achieved in the absence of unobservable disturbances, while robustness is preserved when additional unobservable disturbances occur during controller implementation. The impact of unobservable Dirichlet-Robin boundary disturbances is analyzed by proving bounded,
What carries the argument
Disturbance observer for observable Dirichlet boundary disturbances together with distributed synchronization controllers, whose closed-loop error system is analyzed via the generalized Lyapunov method and recursion technique after well-posedness is established by the lifting technique and semigroup theory.
If this is right
- Exponential tracking of the reference trajectory by every agent when unobservable disturbances are absent.
- Preservation of robustness with bounded synchronization errors when unobservable disturbances appear during operation.
- Input-to-state stability of the overall closed-loop system with respect to the combined effect of all disturbances.
- Bounded solutions of the synchronization error system under unobservable Dirichlet-Robin boundary disturbances.
Where Pith is reading between the lines
- The same observer-plus-controller structure could be tested on networks governed by other linear parabolic PDEs arising in diffusion or reaction processes.
- Performance under time-varying or stochastic unobservable disturbances remains an open question that follows directly from the ISS result.
- The boundary-measurement requirement suggests possible hardware implementations using only edge sensors in spatially distributed plants.
Load-bearing premise
The underlying PDE systems must admit well-posed solutions under the chosen boundary conditions so that the generalized Lyapunov method and recursion technique can establish boundedness and input-to-state stability for the assumed classes of observable and unobservable disturbances.
What would settle it
A concrete numerical simulation or analysis in which the synchronization error grows unbounded or the input-to-state stability estimate fails when unobservable disturbances are added would disprove the robustness claims.
Figures





read the original abstract
This paper investigates robust synchronization for multi-agent systems (MASs) governed by parabolic partial differential equations in the presence of both observable and unobservable disturbances. Using only boundary output measurements, a disturbance observer is designed to estimate observable Dirichlet boundary disturbances while ensuring robustness of the observer error system with unobservable disturbances occurring in the domain. Using only the reference signal and local output information, distributed synchronization controllers are then constructed to enable all agents to track the reference trajectory. In particular, exponential tracking is achieved in the absence of unobservable disturbances, while robustness is preserved when additional unobservable disturbances occur during controller implementation. We further analyze the impact of unobservable Dirichlet-Robin boundary disturbances on synchronization performance by proving the boundedness of solutions to the synchronization error system. Moreover, to characterize the influence of all disturbances, input-to-state stability (ISS) is established for the closed-loop system. For the involved systems, the generalized Lyapunov method and the recursion technique are extensively employed in the stability analysis, and the lifting technique and semigroup theory are used to prove the well-posedness. Simulation results validate the proposed control scheme, demonstrating effective disturbance estimation and rejection, robust synchronization, and the ISS properties under various scenarios.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a robust synchronization control scheme for multi-agent systems governed by parabolic PDEs subject to both observable Dirichlet boundary disturbances and unobservable domain disturbances. A disturbance observer is designed using only boundary output measurements to estimate the observable disturbances while remaining robust to unobservable ones; distributed controllers are then constructed from the reference signal and local outputs to achieve synchronization. The paper claims exponential tracking in the absence of unobservable disturbances, preservation of robustness when they are present, boundedness of the synchronization error system under unobservable Dirichlet-Robin boundary disturbances, and input-to-state stability (ISS) of the closed-loop system. Proofs rely on the generalized Lyapunov method combined with a recursion technique, while well-posedness is established via the lifting technique and semigroup theory. Simulation results are provided to illustrate disturbance estimation, rejection, and ISS properties.
Significance. If the well-posedness and stability results hold, the work advances robust observer-based synchronization for infinite-dimensional multi-agent systems by explicitly handling mixed observable and unobservable disturbances with boundary-only measurements. The combination of established tools (semigroup theory, lifting, generalized Lyapunov, recursion) with ISS analysis and numerical validation provides a concrete contribution to PDE control literature, with potential relevance to applications such as networked heat or fluid systems where interior disturbances are common.
major comments (1)
- [well-posedness analysis (referenced in abstract and stability sections)] The well-posedness analysis invokes the lifting technique and semigroup theory to guarantee existence of solutions for the closed-loop system. However, unobservable disturbances are described as occurring in the domain (interior forcing terms), whereas the lifting technique is standardly applied to boundary disturbances. For interior disturbances to preserve the generation of a C0-semigroup, the perturbation must typically satisfy admissibility or relative boundedness conditions with respect to the generator (e.g., via Lumer-Phillips or perturbation theorems). No explicit verification of these conditions for the assumed class of unobservable disturbances is apparent, which directly underpins the subsequent boundedness and ISS claims.
minor comments (1)
- [Abstract / Introduction] The abstract refers to the 'generalized Lyapunov method and the recursion technique' without a brief introductory reference or one-sentence explanation; adding a short pointer to the relevant literature or a high-level outline would improve accessibility for readers outside the immediate subfield.
Simulated Author's Rebuttal
We thank the referee for the careful and constructive review of our manuscript. The comment on well-posedness is well-taken and highlights an area where additional rigor will strengthen the presentation. We address it point by point below and will revise the manuscript accordingly.
read point-by-point responses
-
Referee: The well-posedness analysis invokes the lifting technique and semigroup theory to guarantee existence of solutions for the closed-loop system. However, unobservable disturbances are described as occurring in the domain (interior forcing terms), whereas the lifting technique is standardly applied to boundary disturbances. For interior disturbances to preserve the generation of a C0-semigroup, the perturbation must typically satisfy admissibility or relative boundedness conditions with respect to the generator (e.g., via Lumer-Phillips or perturbation theorems). No explicit verification of these conditions for the assumed class of unobservable disturbances is apparent, which directly underpins the subsequent boundedness and ISS claims.
Authors: We agree that the well-posedness argument for the closed-loop system with interior unobservable disturbances requires explicit verification of the perturbation conditions. In the original manuscript the lifting technique was applied to the observable Dirichlet boundary disturbances, while the unobservable domain disturbances were treated as forcing terms in the abstract evolution equation. To address the referee's concern, the revised version will add a dedicated paragraph in the well-posedness section that invokes the standard bounded-perturbation theorem for C0-semigroups: we will show that the operator induced by the unobservable domain disturbance is bounded (or relatively bounded with relative bound <1) with respect to the generator of the nominal parabolic operator. This directly implies that the perturbed operator still generates a C0-semigroup, thereby justifying existence and uniqueness of mild solutions. The same argument will be used to support the subsequent boundedness and ISS results. We view this addition as a clarification rather than a change in the underlying mathematics. revision: yes
Circularity Check
No circularity: derivation applies standard external techniques to constructed systems
full rationale
The paper constructs a disturbance observer and distributed controllers, then invokes lifting technique plus semigroup theory for well-posedness of the abstract evolution equation and generalized Lyapunov method plus recursion for boundedness and ISS of the synchronization error system. These are established, externally verifiable mathematical tools applied after the controller design; no parameter is fitted to a data subset and then renamed a prediction, no central claim reduces by definition to a self-citation chain, and no ansatz is smuggled via prior work by the same authors. The analysis remains self-contained against external benchmarks such as Lumer-Phillips or ISS definitions.
Axiom & Free-Parameter Ledger
axioms (3)
- domain assumption The multi-agent systems are governed by parabolic partial differential equations with Dirichlet boundary conditions.
- standard math Semigroup theory and the lifting technique guarantee well-posedness of the closed-loop systems.
- domain assumption The generalized Lyapunov method and recursion technique apply to the observer error and synchronization error systems.
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/AbsoluteFloorClosure.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
lifting technique and semigroup theory are used to prove the well-posedness... generalized Lyapunov method and the recursion technique... ISS
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Theorem 4.1... Lumer-Phillips... dissipativity and surjectivity of I-A
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
L. Aguilar, Y . Orlov, and A. Pisano. Leader-follower syn chronization and ISS analysis for a network of boundary-con trolled wave PDEs. IEEE Control Systems Letters, 5(2):683–688, 2021
work page 2021
-
[2]
Y . Chen, Z. Zuo, and Y . Wang. Bipartite consensus for a net work of wave equations with time-varying disturbances. Systems & Control Letters , 136,
-
[3]
Y . Chen, Z. Zuo, and Y . Wang. Bipartite consensus for a net work of wave PDEs over a signed directed graph. Automatica, 129, 2021. 109640. 21
work page 2021
-
[4]
Z. Chen, J. Y ang, and X. Zong. Leader-follower synchroni zation controller design for a network of boundary-control led wave PDEs with structured time-varying perturbations and general disturbances. Journal of the Franklin Institute, 358(1):834–855, 2021
work page 2021
-
[5]
M. A. Demetriou. Synchronization and consensus control lers for a class of parabolic distributed parameter systems . Systems & Control Letters, 62(1):70– 76, 2013
work page 2013
-
[6]
M. A. Demetriou. Design of adaptive output feedback sync hronizing controllers for networked PDEs with boundary and in-domain structured perturbations and disturbances. Automatica, 90:220–229, 2018
work page 2018
- [7]
-
[8]
L. C. Evans. Partial Differential Equations. American Mathematical Society, Providence, Rhode Island , 2010
work page 2010
-
[9]
P . Frihauf and M. Krstic. Leader-enabled deployment ont o planar curves: A PDE-based approach. IEEE Transactions on Automatic Control, 56(8):1791– 1806, 2011
work page 2011
-
[10]
N. Ghods and M. Krstic. Multiagent deployment over a sou rce. IEEE Transactions on Control Systems Technology, 20(1):277–285, 2012
work page 2012
-
[11]
B. Z. Guo and H. C. Zhou. The active disturbance rejectio n control to stabilization for multi-dimensional wave equa tion with boundary control matched disturbance. IEEE Transactions on Automatic Control, 60(1):143–157, 2015
work page 2015
-
[12]
J. Han. From PID to active disturbance rejection contro l. IEEE Transactions on Industrial Electronics, 56(3):900–906, 2009
work page 2009
-
[13]
P . He. Consensus of uncertain parabolic PDE agents via a daptive unit-vector control scheme. IET Control Theory & Applications , 12(18):2488–2494, 2018
work page 2018
-
[14]
S. Konduri, P . R. Pagilla, and S. Darbha. V ehicle formations using directed information flow graphs. In 2013 American Control Conference (ACC), pages 3045–3050, Washington, DC, USA, 2013
work page 2013
-
[15]
S. R. Kumar and D. Mukherjee. Cooperative salvo guidanc e using finite-time consensus over directed cycles. IEEE Transactions on Aerospace and Electronic Systems, 56(2):1504–1514, 2020
work page 2020
- [16]
-
[17]
Y . J. Liu, X. Shang, L. Tang, and S. Zhang. Finite-time co nsensus adaptive neural network control for nonlinear mult iagent systems under PDE models. IEEE Transactions on Neural Networks and Learning Systems , 36(4):6218–6228, 2025
work page 2025
-
[18]
J. Marshall, M. Broucke, and B. Francis. Formations of v ehicles in cyclic pursuit. IEEE Transactions on Automatic Control, 49(11):1963–1974, 2004
work page 1963
-
[19]
S. D. J. McArthur, E. M. Davidson, V . M. Catterson, A. L. D imeas, N. D. Hatziargyriou, F. Ponci, et al. Multi-agent sys tems for power engineering applications—part I: Concepts, approaches and technical c hallenges. IEEE Transactions on Power Systems, 22(4):1743–1752, 2007
work page 2007
-
[20]
T. Meurer and M. Krstic. Finite-time multi-agent deplo yment: A nonlinear PDE motion planning approach. Automatica, 47(11):2534–2542, 2011
work page 2011
-
[21]
A. Mironchenko. Input-to-state stability of distribu ted parameter systems. arXiv:2302.00535
-
[22]
A. Mironchenko and C. Prieur. Input-to-state stabilit y of infinite-dimensional systems: Recent results and open q uestions. SIAM Review, 62(3):529–614, 2020
work page 2020
-
[23]
T. Morstyn, B. Hredzak, and V . G. Agelidis. Cooperative multi-agent control of heterogeneous storage devices dist ributed in a DC microgrid. IEEE Transactions on Power Systems, 31(4):2974–2986, 2016
work page 2016
- [24]
-
[25]
A. Pazy. Semigroups of Linear Operators and Applications to Partial Differential Equations. Springer, New Y ork, NY , 1983
work page 1983
-
[26]
A. Pilloni, A. Pisano, Y . Orlov, and E. Usai. Consensus-based control for a network of diffusion PDEs with boundary local interaction. IEEE Transactions on Automatic Control, 61(9):2708–2713, 2016
work page 2016
- [27]
-
[28]
J. Qi, R. V azquez, and M. Krstic. Multi-agent deploymen t in 3-D via PDE control. IEEE Transactions on Automatic Control, 60(4):891–906, 2015
work page 2015
-
[29]
J. Qi, S. Wang, J.-A. Fang, and M. Diagne. Control of mult i-agent systems with input delay via PDE-based method. Automatica, 106:91–100, 2019
work page 2019
-
[30]
J. Qi, J. Zhang, and Y . Ding. Wave equation-based time-v arying formation control of multiagent systems. IEEE Transactions on Control Systems Technology, 26(5):1578–1591, 2018
work page 2018
- [31]
-
[32]
J. A. Rogge and D. Aeyels. V ehicle platoons through ring coupling. IEEE Transactions on Automatic Control, 53(6):1370–1377, 2008
work page 2008
-
[33]
S. X. Tang, J. Qi, and J. Zhang. Formation tracking contr ol for multi-agent systems: A wave-equation based approach . International Journal of Control, Automation and Systems, 15:2704–2713, 2017
work page 2017
-
[34]
S. Wang, M. Diagne, and J. Qi. Delay-adaptive compensat ion for 3-D formation control of leader-actuated multi-age nt systems. Automatica, 164, 2024. 111645
work page 2024
-
[35]
X. Y an, K. Li, C. Y ang, J. Zhuang, and J. Cao. Consensus offractional-order multi-agent systems via observer-based boundary control. IEEE Transactions on Network Science and Engineering , 11(4):3370–3382, 2024
work page 2024
- [36]
-
[37]
Q. Y ao, Q. Li, C. Huang, and H. Jahanshahi. PDE-based dis tributed adaptive fault-tolerant attitude consensus of mu ltiple flexible spacecraft. Aerospace Science and Technology, 146, 2024. 108934
work page 2024
-
[38]
Y . Y u, Z. Li, X. Wang, and L. Shen. Bearing-only circumna vigation control of the multi-agent system around a moving t arget. IET Control Theory & Applications, 13(17):2747–2757, 2019
work page 2019
-
[39]
J. Zhan, L. Zhang, and J. Qiao. Boundary consensus of net worked hyperbolic systems of conservation laws. IEEE Transactions on Automatic Control , 70(8):4989–5004, 2025
work page 2025
- [40]
- [41]
- [42]
-
[43]
W. Zhao, Y . Liu, and X. Y ao. PDE-based boundary adaptive consensus control of multiagent systems with input constra ints. IEEE Transactions on Neural Networks and Learning Systems , 35(9):12617–12626, 2024
work page 2024
-
[44]
J. Zheng and G. Zhu. Input-to-state stability with resp ect to boundary disturbances for a class of semi-linear para bolic equations. Automatica, 97(8):271– 277, 2018
work page 2018
-
[45]
J. Zheng and G. Zhu. Global ISS for the viscous Burgers’ e quation with Dirichlet boundary disturbances. IEEE Transactions on Automatic Control , 69(10):7174–7181, 2024
work page 2024
-
[46]
J. Zheng and G. Zhu. Generalized Lyapunov functionals f or the input-to-state stability of infinite-dimensional sy stems. Automatica, 172, 2025. 112005
work page 2025
-
[47]
X. Zong, J. Zheng, J. Wei, and J. Y ang. Synchronizing controller design for networked heat equations with boundary structured time-varying perturbations and general disturbances. Journal of Process Control, 107:94–102, 2021. 23
work page 2021
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.