Neural Network-based Co-design of Output-Feedback Control Barrier Function and Observer with Input Constraints
Pith reviewed 2026-05-21 22:03 UTC · model grok-4.3
The pith
Neural networks can jointly design a controller, observer, and control barrier function to keep partially observed systems safe under input constraints.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
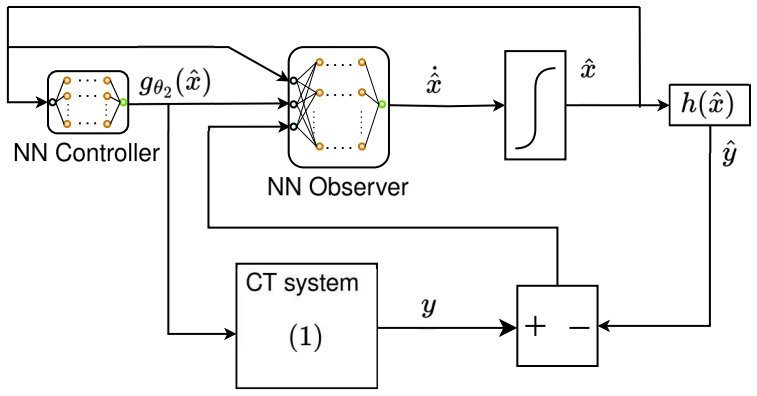
We propose a neural network-based framework for the co-design of a safety controller, observer, and CBF for partially observed continuous-time systems with input constraints. By formulating barrier conditions over an augmented state space, our approach ensures safety without requiring bounded estimation errors or handcrafted barrier functions. All components are jointly trained by formulating appropriate loss functions, and we introduce a validity condition to provide formal safety guarantees beyond the training data.
What carries the argument
Formulation of barrier conditions over an augmented state space that combines true and estimated states, trained jointly with a validity condition for generalization.
If this is right
- The true system state remains inside the safe set for all time.
- The controller satisfies the given input constraints at every step.
- Safety guarantees hold for initial conditions and trajectories not present in the training dataset.
- The approach applies directly to continuous-time systems that provide only partial observations.
Where Pith is reading between the lines
- This co-design could reduce reliance on costly full-state sensors in robotic or vehicle applications.
- One testable extension is to check whether the validity condition still holds when the system is subjected to unmodeled disturbances.
- The framework might be combined with existing observer designs to improve performance on high-dimensional systems.
Load-bearing premise
The trained neural networks satisfy the barrier conditions and validity condition for states outside the training distribution in a way that keeps the actual system safe.
What would settle it
A simulation or experiment showing the true state leaving the safe set for an unseen initial condition, even when the validity condition is claimed to hold, would disprove the formal guarantee.
Figures




read the original abstract
Control Barrier Functions (CBFs) provide a powerful framework for ensuring safety in dynamical systems. However, their application typically relies on full state information, which is often violated in real-world due to the availability of partial state information. In this work, we propose a neural network-based framework for the co-design of a safety controller, observer, and CBF for partially observed continuous-time systems with input constraints. By formulating barrier conditions over an augmented state space, our approach ensures safety without requiring bounded estimation errors or handcrafted barrier functions. All components are jointly trained by formulating appropriate loss functions, and we introduce a validity condition to provide formal safety guarantees beyond the training data. Finally, we demonstrate the effectiveness of the proposed approach through several case studies.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a neural network-based co-design of an output-feedback controller, observer, and Control Barrier Function (CBF) for partially observed continuous-time systems subject to input constraints. Barrier conditions are defined over an augmented state space that includes the estimated state and observer dynamics; all components are trained jointly via loss functions that penalize violations of the barrier inequalities and input limits; a validity condition is introduced to convert satisfaction of the augmented-state conditions into a formal safety guarantee for the true system without requiring explicit bounds on estimation error or handcrafted barrier functions. Effectiveness is shown on several case studies.
Significance. If the validity condition can be shown to rigorously certify safety for the true closed-loop system from approximate satisfaction of the augmented-state inequalities by the trained networks, the work would offer a meaningful advance for safe output-feedback control. It removes the common requirement for bounded observer errors and avoids manual CBF construction, which could simplify deployment in partially observed settings where full-state CBFs are impractical.
major comments (3)
- [Abstract / validity condition section] Abstract and the section defining the validity condition: the manuscript states that the validity condition supplies formal safety guarantees beyond the training data, yet provides neither an explicit mathematical statement of the condition nor a derivation showing how satisfaction of the augmented-state barrier inequalities implies invariance of the safe set for the true system when observer error is unbounded. Without this derivation the central safety claim rests on an unproven transfer from training loss to global certificate.
- [Training loss formulation] Training procedure (loss functions for barrier conditions): the loss is minimized over finite samples drawn from a distribution; the manuscript does not describe any post-training verification (dense sampling, interval bounds, or Lipschitz-based certificates) that would establish the barrier decrease condition holds with sufficient accuracy over the entire relevant domain of the augmented state. In continuous time, even localized violations can allow trajectories to exit the safe set, so the formal guarantee cannot be supported by the training procedure alone.
- [Controller and constraint section] Input-constraint handling: while the abstract claims the controller respects input constraints, the manuscript does not clarify whether the constraint is enforced exactly (e.g., via projection or saturation in the control law) or only approximately through an additional loss term; if the latter, the interaction between the barrier loss and the constraint loss must be analyzed to ensure the closed-loop vector field remains well-defined.
minor comments (2)
- [Preliminaries / notation] Notation for the augmented state vector and the observer dynamics should be introduced earlier and used consistently; the current presentation makes it difficult to track which variables are estimated versus true.
- [Numerical examples] The case-study figures would benefit from explicit labeling of the safe set boundary and the estimated versus true trajectories so that visual inspection of safety can be performed without referring back to the text.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback. The comments highlight important points for strengthening the formal aspects of the safety guarantees and clarifying implementation details. We address each major comment below and will revise the manuscript accordingly to improve clarity and rigor.
read point-by-point responses
-
Referee: [Abstract / validity condition section] Abstract and the section defining the validity condition: the manuscript states that the validity condition supplies formal safety guarantees beyond the training data, yet provides neither an explicit mathematical statement of the condition nor a derivation showing how satisfaction of the augmented-state barrier inequalities implies invariance of the safe set for the true system when observer error is unbounded. Without this derivation the central safety claim rests on an unproven transfer from training loss to global certificate.
Authors: We agree that an explicit statement and derivation are necessary to rigorously support the safety claim. In the revised manuscript we will add a precise mathematical formulation of the validity condition and a step-by-step derivation that shows how satisfaction of the augmented-state barrier inequalities, together with the observer dynamics, implies forward invariance of the safe set for the true system. The derivation will rely on the structure of the augmented state rather than any assumption of bounded estimation error. This addition will be placed in the validity-condition section and cross-referenced from the abstract. revision: yes
-
Referee: [Training loss formulation] Training procedure (loss functions for barrier conditions): the loss is minimized over finite samples drawn from a distribution; the manuscript does not describe any post-training verification (dense sampling, interval bounds, or Lipschitz-based certificates) that would establish the barrier decrease condition holds with sufficient accuracy over the entire relevant domain of the augmented state. In continuous time, even localized violations can allow trajectories to exit the safe set, so the formal guarantee cannot be supported by the training procedure alone.
Authors: The referee correctly identifies that finite-sample minimization alone cannot guarantee the barrier condition everywhere. While the validity condition is intended to convert approximate satisfaction into a formal certificate, we will strengthen the training section by adding a post-training verification step. This will include dense sampling over a fine grid covering the relevant augmented-state domain together with a Lipschitz-based bound on the maximum possible violation of the barrier inequality. The revised text will explicitly state that the formal guarantee is obtained only after this verification confirms that the learned functions satisfy the conditions to within a controllable tolerance. revision: yes
-
Referee: [Controller and constraint section] Input-constraint handling: while the abstract claims the controller respects input constraints, the manuscript does not clarify whether the constraint is enforced exactly (e.g., via projection or saturation in the control law) or only approximately through an additional loss term; if the latter, the interaction between the barrier loss and the constraint loss must be analyzed to ensure the closed-loop vector field remains well-defined.
Authors: We appreciate the request for clarification. The input constraints are enforced exactly by a projection operator that is applied directly to the output of the learned control law before it is applied to the system; the projection is part of the deployed controller and guarantees that the control input always lies in the admissible set. The constraint-related loss term is used only during training to encourage the network to produce values that are easy to project. In the revision we will explicitly describe the projection operator, prove that the resulting closed-loop vector field remains Lipschitz (hence well-defined), and discuss the interaction with the barrier loss to confirm that the safety certificate is unaffected. revision: yes
Circularity Check
Validity condition converts training-loss satisfaction on augmented state into 'formal' safety guarantee without independent global certificate
specific steps
-
fitted input called prediction
[Abstract; formulation and training paragraphs]
"All components are jointly trained by formulating appropriate loss functions, and we introduce a validity condition to provide formal safety guarantees beyond the training data."
The validity condition is presented as supplying formal safety for the true system even without bounded observer error. However, the only mechanism described for satisfying the underlying barrier conditions is minimization of loss functions on finite training samples drawn from the augmented-state distribution. Thus the 'formal guarantee beyond training data' is obtained simply by declaring that satisfaction of the training losses implies the desired property, without an additional certificate that the inequalities hold globally or on unseen states.
full rationale
The paper's central safety claim rests on jointly training NNs via loss functions that penalize violations of barrier conditions over an augmented state, then invoking a validity condition to extend this to formal guarantees for the true system beyond training data. Because the validity condition is defined directly in terms of the same barrier inequalities whose approximate satisfaction is the training objective, the formal guarantee reduces to a re-statement of the fitted loss minimum rather than an independent verification step. No post-training global check, interval arithmetic, or dense sampling argument is supplied to establish that the inequalities hold everywhere in the domain. This matches the 'fitted_input_called_prediction' pattern: the safety result is statistically forced by the training procedure on the data distribution used to define the losses.
Axiom & Free-Parameter Ledger
free parameters (2)
- neural network weights and biases
- loss weighting coefficients
axioms (2)
- domain assumption The system dynamics are known and continuous-time
- domain assumption Neural networks can approximate the required functions sufficiently well
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
By formulating barrier conditions over an augmented state space... validity condition to provide formal safety guarantees beyond the training data (Theorem 2, Lmaxϵ + η∗SOP ≤ 0)
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
neural network-based framework for the co-design of a safety controller, observer, and CBF
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Control barrier functions: Theory and applications,
A. D. Ames, S. Coogan, M. Egerstedt, G. Notomista, K. Sree nath, and P . Tabuada, “Control barrier functions: Theory and applications,” in 18th European control conference (ECC), 2019, pp. 3420–3431
work page 2019
-
[2]
Formal synthesis of stochastic systems via control barrier certificates,
P . Jagtap, S. Soudjani, and M. Zamani, “Formal synthesis of stochastic systems via control barrier certificates,” IEEE Transactions on Automatic Control, vol. 66, no. 7, pp. 3097–3110, 2021
work page 2021
-
[3]
Cou nterexample-guided synthesis of robust discrete- time control barrier functions,
E. Shakhesi, A. Katriniok, and W . P . M. H. M. Heemels, “Cou nterexample-guided synthesis of robust discrete- time control barrier functions,” IEEE Control Systems Letters, vol. 9, pp. 1574–1579, 2025
work page 2025
-
[4]
Control barrier functions for complete and in complete information stochastic systems,
A. Clark, “Control barrier functions for complete and in complete information stochastic systems,” in American Control Conference (ACC), 2019, pp. 2928–2935
work page 2019
-
[5]
D. S. Sundarsingh, J. Bhagiya, J. Chatrola, A. Saoud, and P . Jagtap, “Scalable distributed controller synthesis for multi-agent systems using barrier functions and symbolic c ontrol,” in 62nd IEEE Conference on Decision and Control (CDC), 2023, pp. 6436–6441
work page 2023
-
[6]
Safety-critical mod el predictive control with discrete-time control barrier function,
J. Zeng, B. Zhang, and K. Sreenath, “Safety-critical mod el predictive control with discrete-time control barrier function,” in American Control Conference (ACC), 2021, pp. 3882–3889
work page 2021
-
[7]
R. Cheng, G. Orosz, R. M. Murray, and J. W . Burdick, “End-t o-end safe reinforcement learning through bar- rier functions for safety-critical continuous control tas ks,” in Proceedings of the AAAI conference on artificial intelligence, vol. 33, no. 01, 2019, pp. 3387–3395
work page 2019
-
[8]
Adaptive safety with control barrier functions,
A. J. Taylor and A. D. Ames, “Adaptive safety with control barrier functions,” in American Control Conference (ACC), 2020, pp. 1399–1405
work page 2020
-
[9]
Guar anteeing safety of learned perception modules via measurement-robust control barrier functions,
S. Dean, A. Taylor, R. Cosner, B. Recht, and A. Ames, “Guar anteeing safety of learned perception modules via measurement-robust control barrier functions,” in Conference on Robot Learning , 2021, pp. 654–670
work page 2021
-
[10]
Robust safe control synthesis with disturbance observer-based control barrier func- tions,
E. Da¸ s and R. M. Murray, “Robust safe control synthesis with disturbance observer-based control barrier func- tions,” in IEEE 61st Conference on Decision and Control (CDC) , 2022, pp. 5566–5573
work page 2022
-
[11]
Safe and robust observer- controller synthesis using control barrier functions,
D. R. Agrawal and D. Panagou, “Safe and robust observer- controller synthesis using control barrier functions,” IEEE Control Systems Letters, vol. 7, pp. 127–132, 2022
work page 2022
-
[12]
Synthesis of p artially observed jump-diffusion systems via control barrier functions,
N. Jahanshahi, P . Jagtap, and M. Zamani, “Synthesis of p artially observed jump-diffusion systems via control barrier functions,” IEEE Control Systems Letters, vol. 5, no. 1, pp. 253–258, 2020
work page 2020
-
[13]
Formally verified neural networ k control barrier certificates for unknown systems,
M. Anand and M. Zamani, “Formally verified neural networ k control barrier certificates for unknown systems,” IF AC-PapersOnLine, vol. 56, no. 2, pp. 2431–2436, 2023
work page 2023
-
[14]
Data-driven synthesis of safe ty controllers via multiple control barrier certificates,
A. Nejati and M. Zamani, “Data-driven synthesis of safe ty controllers via multiple control barrier certificates,” IEEE Control Systems Letters, vol. 7, pp. 2497–2502, 2023
work page 2023
-
[15]
Synthesis of controllers for partially-observable systems: A data-driven ap- proach,
N. Jahanshahi and M. Zamani, “Synthesis of controllers for partially-observable systems: A data-driven ap- proach,” IF AC-PapersOnLine, vol. 56, no. 2, pp. 5525–5530, 2023
work page 2023
-
[16]
Safety certification for stochastic systems via neural barrier functions,
F. B. Mathiesen, S. C. Calvert, and L. Laurenti, “Safety certification for stochastic systems via neural barrier functions,” IEEE Control Systems Letters, vol. 7, pp. 973–978, 2022
work page 2022
-
[17]
Fossil 2.0: Forma l certificate synthesis for the verification and control of dynamical models,
A. Edwards, A. Peruffo, and A. Abate, “Fossil 2.0: Forma l certificate synthesis for the verification and control of dynamical models,” in Proceedings of the 27th ACM International Conference on Hyb rid Systems: Computation and Control, 2024, pp. 1–10
work page 2024
-
[18]
Khalil, Nonlinear Systems, ser
H. Khalil, Nonlinear Systems, ser. Pearson Education. Prentice Hall, 2002
work page 2002
-
[19]
The extended Luenberger observer for nonlin ear systems,
M. Zeitz, “The extended Luenberger observer for nonlin ear systems,” Systems & Control Letters , vol. 9, no. 2, pp. 149–156, 1987
work page 1987
-
[20]
A. Basu, B. S. Dey, and P . Jagtap, “Neural incremental in put-to-state stable control Lyapunov functions for unknown continuous-time systems,” 2025. [Online]. Availa ble: https://arxiv.org/abs/2504.18330
-
[21]
Formal verification of unknown discrete-and continuous-time systems: A data-driven approach,
A. Nejati, A. Lavaei, P . Jagtap, S. Soudjani, and M. Zama ni, “Formal verification of unknown discrete-and continuous-time systems: A data-driven approach,” IEEE Transactions on Automatic Control , vol. 68, no. 5, pp. 3011–3024, 2023
work page 2023
-
[22]
Efficient and accurate estimation of Lipschitz constants for deep neural networks,
M. Fazlyab, A. Robey, H. Hassani, M. Morari, and G. Pappa s, “Efficient and accurate estimation of Lipschitz constants for deep neural networks,” Advances in neural information processing systems , vol. 32, 2019
work page 2019
-
[23]
Lipschitz constant estimation for general neural network archi- tectures using control tools,
P . Pauli, D. Gramlich, and F. Allgöwer, “Lipschitz cons tant estimation for general neural network architectures using control tools,” 2024. [Online]. Available: https:// arxiv.org/abs/2405.01125
-
[24]
Learn ing safe neural network controllers with barrier certificates,
H. Zhao, X. Zeng, T. Chen, Z. Liu, and J. Woodcock, “Learn ing safe neural network controllers with barrier certificates,” F ormal Aspects of Computing, vol. 33, no. 3, pp. 437–455, 2021
work page 2021
-
[25]
Y . Li, C. Wei, and T. Ma, “Towards explaining the regular ization effect of initial large learning rate in training neural networks,” Advances in neural information processing systems , vol. 32, 2019
work page 2019
-
[26]
Adam: A Method for Stochastic Optimization
D. P . Kingma and J. Ba, “ADAM: A method for stochastic opt imization,” 2017. [Online]. Available: https://arxiv.org/abs/1412.6980
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[27]
ECLipsE: Efficient compositi onal Lipschitz constant estimation for deep neural networks,
Y . Xu and S. Sivaranjani, “ECLipsE: Efficient compositi onal Lipschitz constant estimation for deep neural networks,” 2024. [Online]. Available: https://arxiv.org /abs/2404.04375
-
[28]
V . Jagabathula, A. Basu, and P . Jagtap, “Neural network -based co-design of output-feedback control barrier function and observer,” 2025. [Online]. Available: https: //arxiv.org/abs/2509.26597
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[29]
Real-time parameter estimation of PMDC motors using quan tized sensors,
M. A. Obeidat, F. Lin et al., “Real-time parameter estimation of PMDC motors using quan tized sensors,” IEEE Transactions on V ehicular T echnology, vol. 62, no. 7, pp. 2977–2986, 2013
work page 2013
-
[30]
Observing a three-tank system,
M. Hou, Y . Xiong, and R. Patton, “Observing a three-tank system,” IEEE Transactions on Control Systems T echnology, vol. 13, no. 3, pp. 478–484, 2005
work page 2005
-
[31]
Observer-based control barrier func tions for safety critical systems,
Y . Wang and X. Xu, “Observer-based control barrier func tions for safety critical systems,” in American Control Conference (ACC), 2022, pp. 709–714
work page 2022
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.