Embodied Interpretability: Linking Causal Understanding to Generalization in Vision-Language-Action Models
Pith reviewed 2026-07-01 08:19 UTC · model grok-4.3
The pith
Interventional attribution via ISS and NMR diagnoses causal misalignment in VLA policies and predicts their generalization.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
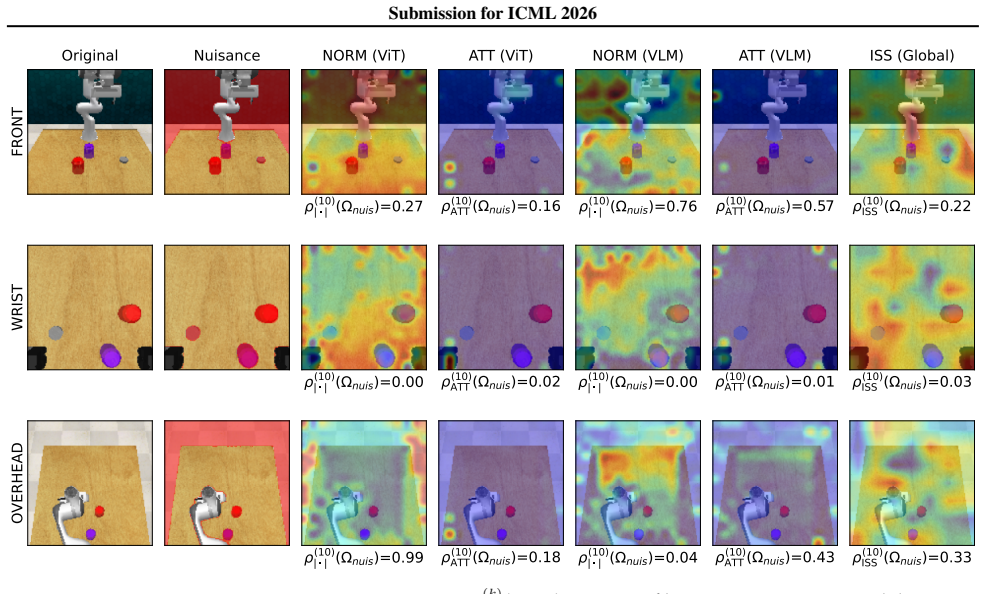
We formulate visual-action attribution as an interventional estimation problem. Accordingly, we introduce the Interventional Significance Score (ISS), an interventional masking procedure for estimating the causal influence of visual regions on action predictions, and the Nuisance Mass Ratio (NMR), a scalar measure of attribution to task-irrelevant features. We analyze the statistical properties of ISS and show that it admits unbiased estimation, and we characterize conditions under which action prediction error provides a valid proxy for causal influence. Experiments across diverse manipulation tasks indicate that NMR predicts generalization behavior and that ISS yields more faithful explana
What carries the argument
The Interventional Significance Score (ISS), an interventional masking procedure that estimates causal influence of visual regions on action predictions by comparing prediction errors with and without masked regions.
If this is right
- NMR serves as a predictor of generalization behavior across manipulation tasks under distribution shift.
- ISS yields explanations that more faithfully reflect causal influences than existing interpretability methods.
- Action prediction error acts as a proxy for causal influence when the stated conditions on the policy hold.
- Unbiased estimation of causal attribution is possible through the ISS interventional masking procedure.
- Interventional attribution provides a diagnostic for identifying causal misalignment in embodied policies.
Where Pith is reading between the lines
- Policies with low NMR could be selected or retrained to improve robustness in environments with changing backgrounds or distractors.
- The ISS procedure might be incorporated into training loops to directly penalize nuisance attribution.
- Similar interventional masking could be tested on non-manipulation tasks such as navigation to check if the NMR-generalization link holds more broadly.
Load-bearing premise
That visual-action attribution can be validly formulated as an interventional estimation problem and that action prediction error provides a valid proxy for causal influence under the characterized conditions.
What would settle it
A collection of VLA policies where NMR values do not correlate with measured generalization error on held-out tasks that alter task-irrelevant visual features.
Figures












read the original abstract
Vision-Language-Action (VLA) policies often fail under distribution shift, suggesting that decisions may depend on spurious visual correlations rather than task-relevant causes. We formulate visual-action attribution as an interventional estimation problem. Accordingly, we introduce the Interventional Significance Score (ISS), an interventional masking procedure for estimating the causal influence of visual regions on action predictions, and the Nuisance Mass Ratio (NMR), a scalar measure of attribution to task-irrelevant features. We analyze the statistical properties of ISS and show that it admits unbiased estimation, and we characterize conditions under which action prediction error provides a valid proxy for causal influence. Experiments across diverse manipulation tasks indicate that NMR predicts generalization behavior and that ISS yields more faithful explanations than existing interpretability methods. These results suggest that interventional attribution provides a simple diagnostic approach for identifying causal misalignment in embodied policies.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript formulates visual-action attribution in Vision-Language-Action (VLA) policies as an interventional estimation problem. It introduces the Interventional Significance Score (ISS) via an interventional masking procedure to estimate causal influence of visual regions on action predictions, and the Nuisance Mass Ratio (NMR) as a scalar measure of attribution to task-irrelevant features. The paper asserts that ISS admits unbiased estimation, characterizes conditions under which action prediction error serves as a valid proxy for causal influence, and reports experiments across manipulation tasks showing that NMR predicts generalization behavior while ISS yields more faithful explanations than existing interpretability methods.
Significance. If the statistical analysis establishing unbiasedness of ISS and the experimental validation of the NMR-generalization link hold under the stated conditions, the work would supply a concrete diagnostic for causal misalignment in embodied policies. This could meaningfully connect interpretability techniques to robustness in robotics, particularly if the new scores are shown to be non-circular and the proxy conditions are empirically verified.
major comments (2)
- [Abstract] Abstract: the claims that 'ISS admits unbiased estimation' and that 'conditions under which action prediction error provides a valid proxy for causal influence' are characterized are stated without any equations, proof sketches, or section references. These derivations are load-bearing for both the NMR-generalization correlation and the claim that ISS is more faithful than baselines.
- [Abstract] The experimental results are described only at the level of the abstract ('experiments across diverse manipulation tasks indicate that NMR predicts generalization behavior'). No details are supplied on how the paper's own characterized conditions for the prediction-error proxy were verified in the reported tasks, leaving the central empirical claim uncheckable.
Simulated Author's Rebuttal
We thank the referee for the feedback on the abstract. We address each major comment below and will make targeted revisions for clarity.
read point-by-point responses
-
Referee: [Abstract] Abstract: the claims that 'ISS admits unbiased estimation' and that 'conditions under which action prediction error provides a valid proxy for causal influence' are characterized are stated without any equations, proof sketches, or section references. These derivations are load-bearing for both the NMR-generalization correlation and the claim that ISS is more faithful than baselines.
Authors: The abstract is a concise summary and follows standard practice by omitting equations and proofs. The unbiasedness of ISS is established with equations and proof in Section 3.1; the conditions for the prediction-error proxy are characterized in Section 3.2. We will revise the abstract to add explicit section references (e.g., 'as analyzed in Sec. 3.1') so readers can immediately locate the derivations. This change improves navigability without altering technical content. revision: yes
-
Referee: [Abstract] The experimental results are described only at the level of the abstract ('experiments across diverse manipulation tasks indicate that NMR predicts generalization behavior'). No details are supplied on how the paper's own characterized conditions for the prediction-error proxy were verified in the reported tasks, leaving the central empirical claim uncheckable.
Authors: The abstract summarizes results at a high level. Full experimental details, including verification that the characterized conditions for the prediction-error proxy hold in the reported manipulation tasks, the specific correlation analyses between NMR and generalization, and comparisons showing ISS faithfulness, appear in Section 4 with tables, figures, and ablations. We will revise the abstract to briefly indicate that the proxy conditions were empirically checked (e.g., 'conditions verified across tasks'), while preserving conciseness. The claims remain fully verifiable in the main text. revision: partial
Circularity Check
No significant circularity; derivation introduces independent interventional measures and statistical analysis
full rationale
The abstract formulates visual-action attribution as an interventional estimation problem and defines ISS via a new masking procedure plus NMR as a derived scalar; it then separately analyzes ISS for unbiasedness and characterizes proxy conditions without reducing either quantity to a fitted parameter or prior self-citation. No equations or steps in the provided text equate a claimed prediction or uniqueness result back to its own inputs by construction. The central claims therefore rest on externally verifiable interventional definitions and statistical properties rather than self-referential loops.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Visual regions can be masked to perform interventional estimation of causal influence on action predictions
invented entities (2)
-
Interventional Significance Score (ISS)
no independent evidence
-
Nuisance Mass Ratio (NMR)
no independent evidence
Forward citations
Cited by 1 Pith paper
-
Bridge-WA: Predicting Where and How the World Changes for Robotic Action
Bridge-WA introduces a lightweight distillation-based world-action model that uses future-change priors to improve robotic task success and robustness without deployment-time dense rollouts.
Reference graph
Works this paper leans on
-
[1]
URL https://openreview.net/forum? id=SPXCXAStbi. Williams, R. J. and Zipser, D. A learning algorithm for con- tinually running fully recurrent neural networks.Neural computation, 1(2):270–280, 1989. Wu, Y ., Li, A., Hermans, T., Ramos, F., Bajcsy, A., and P´erez-D’Arpino, C. Do what you say: Steering vision- language-action models via runtime reasoning-ac...
-
[2]
A Survey on Vision-Language-Action Models: An Action Tokenization Perspective
URL https://openreview.net/forum? id=b1CVu9l5GO. Zhong, Y ., Bai, F., Cai, S., Huang, X., Chen, Z., Zhang, X., Wang, Y ., Guo, S., Guan, T., Lui, K. N., et al. A survey on vision-language-action models: An action tokenization perspective.Arxiv Preprint Arxiv:2507.01925, 2025. Zhou, J., Ye, K., Liu, J., Ma, T., Wang, Z., Qiu, R., Lin, K.-Y ., Zhao, Z., and...
work page internal anchor Pith review Pith/arXiv arXiv 2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.