Adversarial Objects Against LiDAR-Based Autonomous Driving Systems
Pith reviewed 2026-05-24 22:50 UTC · model grok-4.3
The pith
LiDAR detection in autonomous vehicles can be evaded by optimized adversarial objects.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
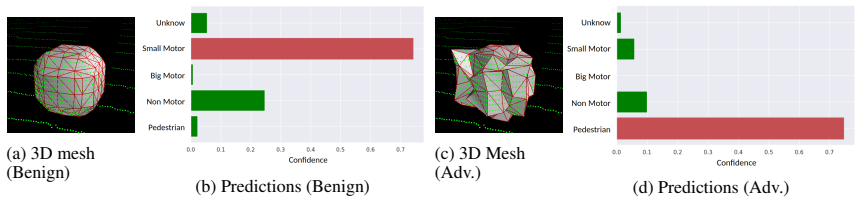
Adversarial objects can be created using optimization to cause LiDAR-based autonomous driving detection systems to miss them under various conditions. This is shown first with a blackbox evolution-based algorithm and then with the gradient-based LiDAR-Adv approach. The effectiveness is verified both on the Baidu Apollo platform and with 3D-printed objects in the real world.
What carries the argument
LiDAR-Adv, the gradient-based optimization approach for creating 3D adversarial objects that evade LiDAR detection.
If this is right
- The Baidu Apollo autonomous driving platform can be attacked by these objects in simulation.
- 3D-printed adversarial objects maintain their ability to evade detection in physical tests.
- Both blackbox and gradient-based optimization can generate successful attacks.
- Such attacks are possible under various real-world conditions.
Where Pith is reading between the lines
- Defenses against these attacks might require changes to how LiDAR data is processed or interpreted.
- The same approach could be applied to other types of sensors used in autonomous systems.
- This work highlights the need for testing physical robustness in addition to digital security for vehicle perception.
Load-bearing premise
The objects optimized in simulation or by querying the system will keep their adversarial properties when physically manufactured and used in actual environments.
What would settle it
Placing a 3D-printed adversarial object in the path of a LiDAR-equipped vehicle and observing whether the detection system identifies it correctly or fails to detect it.
Figures



read the original abstract
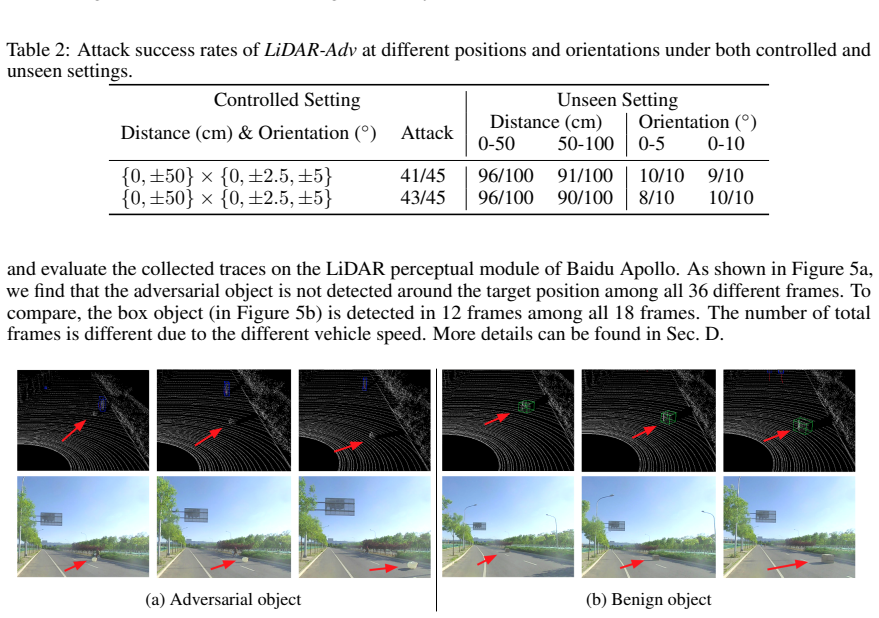
Deep neural networks (DNNs) are found to be vulnerable against adversarial examples, which are carefully crafted inputs with a small magnitude of perturbation aiming to induce arbitrarily incorrect predictions. Recent studies show that adversarial examples can pose a threat to real-world security-critical applications: a "physical adversarial Stop Sign" can be synthesized such that the autonomous driving cars will misrecognize it as others (e.g., a speed limit sign). However, these image-space adversarial examples cannot easily alter 3D scans of widely equipped LiDAR or radar on autonomous vehicles. In this paper, we reveal the potential vulnerabilities of LiDAR-based autonomous driving detection systems, by proposing an optimization based approach LiDAR-Adv to generate adversarial objects that can evade the LiDAR-based detection system under various conditions. We first show the vulnerabilities using a blackbox evolution-based algorithm, and then explore how much a strong adversary can do, using our gradient-based approach LiDAR-Adv. We test the generated adversarial objects on the Baidu Apollo autonomous driving platform and show that such physical systems are indeed vulnerable to the proposed attacks. We also 3D-print our adversarial objects and perform physical experiments to illustrate that such vulnerability exists in the real world. Please find more visualizations and results on the anonymous website: https://sites.google.com/view/lidar-adv.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes LiDAR-Adv, an optimization framework (black-box evolutionary and gradient-based) to synthesize 3D adversarial objects that evade LiDAR-based object detectors. It evaluates the objects against the Baidu Apollo autonomous driving platform in simulation and claims to demonstrate the same vulnerability with 3D-printed physical objects in real-world LiDAR scans.
Significance. If the physical transfer results hold with adequate controls and metrics, the work would be significant for highlighting a new attack surface on LiDAR sensors in safety-critical autonomous systems, extending prior image-domain adversarial research to 3D point clouds with both algorithmic and fabrication-based validation.
major comments (1)
- [Physical experiments] Physical experiments section: the central claim that 3D-printed objects retain their adversarial effect in real-world LiDAR scans is load-bearing, yet the manuscript provides no quantitative transfer metrics (e.g., detection rate or point-cloud distance between simulation and physical scans), no fabrication tolerance analysis, no controls for sensor pose/height/angle, and no environmental variation tests. This leaves the real-world vulnerability demonstration unverified even if the simulation results are correct.
minor comments (2)
- [Abstract] The abstract and introduction should explicitly state the LiDAR model and detection algorithm version used in Apollo experiments for reproducibility.
- [Figures] Figure captions for the 3D-printed objects should include scale, material, and placement distance from the sensor.
Simulated Author's Rebuttal
We thank the referee for the constructive review and the recommendation for major revision. We address the single major comment on the physical experiments below.
read point-by-point responses
-
Referee: [Physical experiments] Physical experiments section: the central claim that 3D-printed objects retain their adversarial effect in real-world LiDAR scans is load-bearing, yet the manuscript provides no quantitative transfer metrics (e.g., detection rate or point-cloud distance between simulation and physical scans), no fabrication tolerance analysis, no controls for sensor pose/height/angle, and no environmental variation tests. This leaves the real-world vulnerability demonstration unverified even if the simulation results are correct.
Authors: We agree that the physical experiments section would be strengthened by quantitative transfer metrics, fabrication tolerance analysis, explicit sensor pose controls, and environmental variation tests. The current manuscript presents the 3D-printed objects primarily as an illustrative demonstration that the simulated adversarial effect can appear in real LiDAR scans, without the detailed quantitative comparisons requested. We will revise the manuscript to add these elements, including detection-rate tables comparing simulation versus physical scans, a brief fabrication tolerance discussion, and documentation of the sensor positioning protocol used in the physical trials. revision: yes
Circularity Check
No circularity: empirical attack generation and testing
full rationale
The paper presents an optimization procedure (evolution-based black-box and gradient-based LiDAR-Adv) to synthesize adversarial 3D objects, followed by direct evaluation on the Baidu Apollo platform in simulation and via 3D-printed physical objects. No equations, parameters, or claims are defined in terms of their own outputs; no predictions are obtained by fitting to a subset and then relabeled; no uniqueness theorems or ansatzes are imported via self-citation. The central results rest on experimental outcomes rather than any self-referential reduction. This is a standard empirical demonstration whose validity hinges on experimental controls, not on internal definitional loops.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Standard assumptions in adversarial machine learning such as the ability to optimize perturbations via gradients or evolution strategies.
Forward citations
Cited by 2 Pith papers
-
Adversarial Trust Poisoning in Vehicular Collaborative Perception
TrustFlip weaponizes consistency-based trust defenses in vehicular collaborative perception by using physical adversarial objects to induce inconsistencies that are misattributed to benign vehicles, leading to their e...
-
Safety in Embodied AI: A Survey of Risks, Attacks, and Defenses
The survey organizes over 400 papers on embodied AI safety into a multi-level taxonomy and flags overlooked issues such as fragile multimodal fusion and unstable planning under jailbreaks.
Reference graph
Works this paper leans on
-
[1]
Synthesizing Robust Adversarial Examples
A. Athalye and I. Sutskever. Synthesizing robust adversarial examples. arXiv preprint arXiv:1707.07397, 2017
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[2]
N. Carlini and D. Wagner. Towards evaluating the robustness of neural networks. InIEEE Symposium on Security and Privacy, 2017, 2017
work page 2017
-
[3]
Towards Evaluating the Robustness of Neural Networks
N. Carlini and D. A. Wagner. Towards evaluating the robustness of neural networks. In2017 IEEE Symposium on Security and Privacy, SP 2017, San Jose, CA, USA, May 22-26, 2017, pages 39–57, 2017. doi: 10.1109/SP.2017.49. URL https://doi.org/10.1109/SP.2017.49
-
[4]
P. Cignoni, M. Callieri, M. Corsini, M. Dellepiane, F. Ganovelli, and G. Ranzuglia. Meshlab: an open-source mesh processing tool. In Eurographics Italian chapter conference, volume 2008, pages 129–136, 2008
work page 2008
-
[5]
R. Collobert and J. Weston. A unified architecture for natural language processing: Deep neural networks with multitask learning. In Proceedings of the 25th international conference on Machine learning, pages 160–167. ACM, 2008
work page 2008
-
[6]
L. Deng, J. Li, J.-T. Huang, K. Yao, D. Yu, F. Seide, M. L. Seltzer, G. Zweig, X. He, J. D. Williams, et al. Recent advances in deep learning for speech research at microsoft. In ICASSP, volume 26, page 64, 2013
work page 2013
-
[7]
Robust Physical-World Attacks on Deep Learning Models
I. Evtimov, K. Eykholt, E. Fernandes, T. Kohno, B. Li, A. Prakash, A. Rahmati, and D. Song. Robust physical-world attacks on deep learning models. arXiv preprint arXiv:1707.08945, 1, 2017
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[8]
I. J. Goodfellow, J. Shlens, and C. Szegedy. Explaining and harnessing adversarial examples. arXiv preprint arXiv:1412.6572, 2014
work page internal anchor Pith review Pith/arXiv arXiv 2014
-
[9]
K. He, X. Zhang, S. Ren, and J. Sun. Deep residual learning for image recognition. In Proceedings of the IEEE conference on computer vision and pattern recognition, pages 770–778, 2016
work page 2016
-
[10]
D. P. Kingma and J. Ba. Adam: A method for stochastic optimization. arXiv preprint arXiv:1412.6980, 2014
work page internal anchor Pith review Pith/arXiv arXiv 2014
-
[11]
Adversarial examples in the physical world
A. Kurakin, I. Goodfellow, and S. Bengio. Adversarial examples in the physical world. arXiv preprint arXiv:1607.02533, 2016
work page internal anchor Pith review Pith/arXiv arXiv 2016
-
[12]
H.-T. D. Liu, M. Tao, C.-L. Li, D. Nowrouzezahrai, and A. Jacobson. Adversarial geometry and lighting using a differentiable renderer. CoRR, abs/1808.02651, 2018
work page internal anchor Pith review Pith/arXiv arXiv 2018
-
[13]
S.-M. Moosavi-Dezfooli, A. Fawzi, and P. Frossard. Deepfool: a simple and accurate method to fool deep neural networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, pages 2574–2582, 2016
work page 2016
-
[14]
N. Papernot, P. McDaniel, S. Jha, M. Fredrikson, Z. B. Celik, and A. Swami. The limitations of deep learning in adversarial settings. In Security and Privacy (EuroS&P), 2016 IEEE European Symposium on, pages 372–387. IEEE, 2016
work page 2016
-
[15]
C. R. Qi, H. Su, K. Mo, and L. J. Guibas. Pointnet: Deep learning on point sets for 3d classification and segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, pages 652–660, 2017
work page 2017
-
[16]
C. E. Shannon. Communication theory of secrecy systems. Bell Labs Technical Journal, 28(4):656–715, 1949
work page 1949
- [17]
-
[18]
M. Sun, J. Tang, H. Li, B. Li, C. Xiao, Y . Chen, and D. Song. Data poisoning attack against unsupervised node embedding methods. arXiv preprint arXiv:1810.12881, 2018
work page internal anchor Pith review Pith/arXiv arXiv 2018
-
[19]
Generating 3D Adversarial Point Clouds
C. Xiang, C. R. Qi, and B. Li. Generating 3d adversarial point clouds. arXiv preprint arXiv:1809.07016, 2018
work page internal anchor Pith review Pith/arXiv arXiv 2018
-
[20]
C. Xiao, R. Deng, B. Li, F. Yu, D. Song, et al. Characterizing adversarial examples based on spatial consistency information for semantic segmentation. In Proceedings of the (ECCV), pages 217–234, 2018
work page 2018
-
[21]
C. Xiao, B. Li, J.-Y . Zhu, W. He, M. Liu, and D. Song. Generating adversarial examples with adversarial networks. arXiv preprint arXiv:1801.02610, 2018
work page internal anchor Pith review Pith/arXiv arXiv 2018
-
[22]
C. Xiao, D. Yang, B. Li, J. Deng, and M. Liu. Meshadv: Adversarial meshes for visual recognition. In CVPR, 2018
work page 2018
-
[23]
Spatially Transformed Adversarial Examples
C. Xiao, J.-Y . Zhu, B. Li, W. He, M. Liu, and D. Song. Spatially transformed adversarial examples.arXiv preprint arXiv:1801.02612, 2018. 9 A Differential Renderer LiDAR Simulation The renderer simulates the physics of a LiDAR sensor that probes the objects in the scene by casting laser Nray rays: R ={ri∈ R3,∥ri∥ = 1,i = 1, 2,··· ,N ray}, with ri represen...
work page internal anchor Pith review Pith/arXiv arXiv 2018
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.