Adaptive Flight Control in the Presence of Limits on Magnitude and Rate
Pith reviewed 2026-05-24 14:49 UTC · model grok-4.3
The pith
An output feedback adaptive controller stabilizes MIMO plants with parametric uncertainties and input magnitude and rate saturation.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
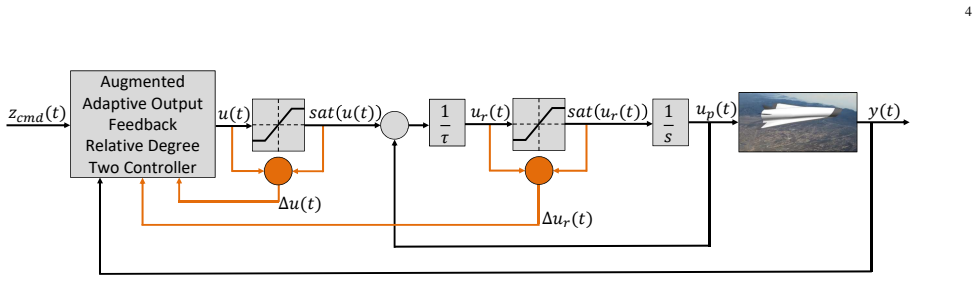
By inserting a rate-limit filter in the control path and modifying the adaptive laws to account for both magnitude and rate saturation, an output-feedback adaptive controller can be designed that stabilizes the closed-loop system and ensures satisfactory tracking even when the plant contains parametric uncertainties.
What carries the argument
The rate-limit filter placed in the control path together with the correspondingly modified adaptive laws.
If this is right
- All closed-loop signals remain bounded.
- Command tracking is achieved to within a neighborhood whose size depends on the design parameters.
- The same architecture applies to both open-loop stable and open-loop unstable plants.
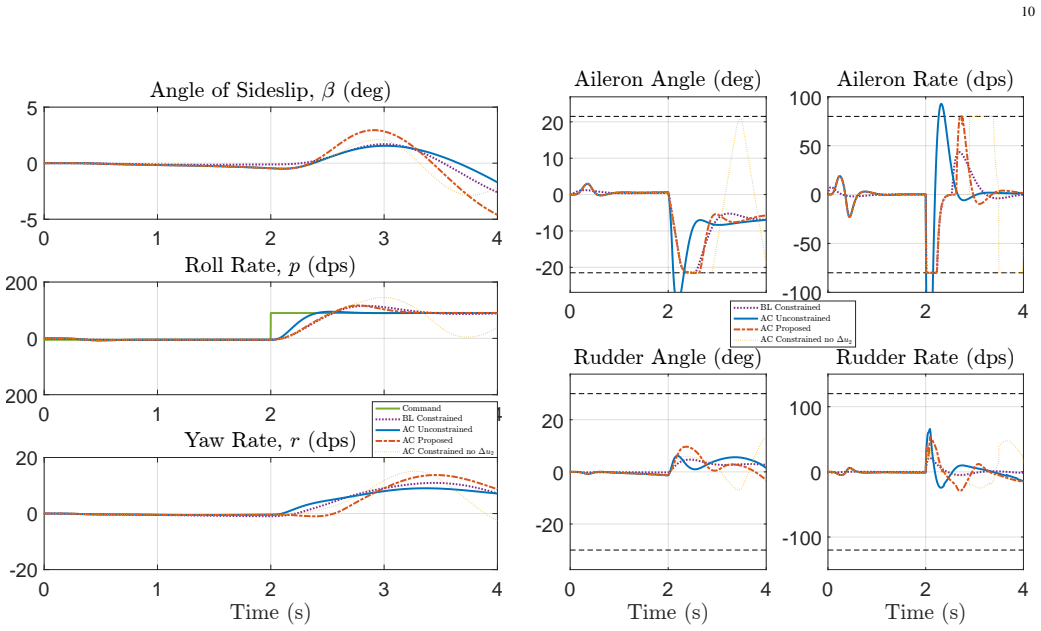
- The guarantees hold for MIMO systems and are illustrated on nonlinear aircraft models.
Where Pith is reading between the lines
- The same filter-plus-modified-law structure might be tested on plants whose uncertainties are not strictly parametric.
- Digital implementation of the rate filter could be examined to check whether sampling effects preserve the stability margins.
- The approach suggests a route for incorporating other actuator nonlinearities by designing analogous filters.
Load-bearing premise
The plant must admit a state-space realization whose uncertainties are purely parametric and whose input channels allow a rate-limit filter to be inserted without destroying the relative-degree or minimum-phase properties required by the adaptive design.
What would settle it
Closed-loop trajectories that become unbounded or fail to track when actuator rate limits are reached, even though the proposed controller and modified laws are applied.
Figures
read the original abstract
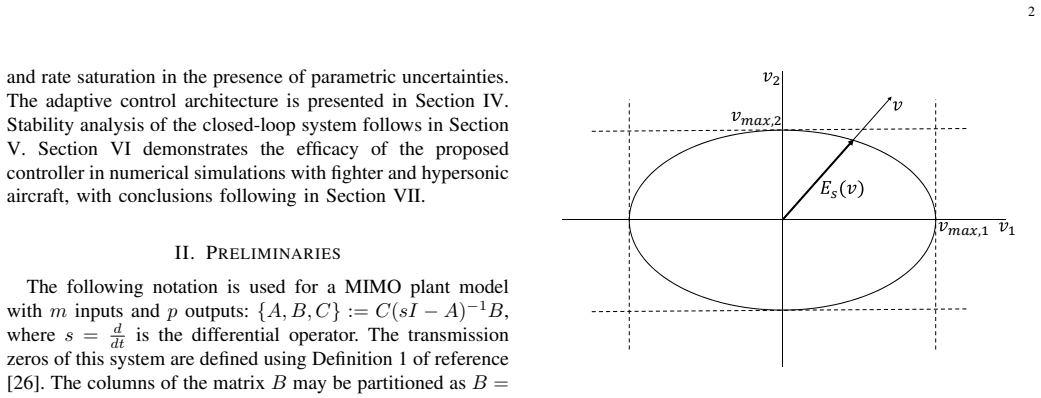
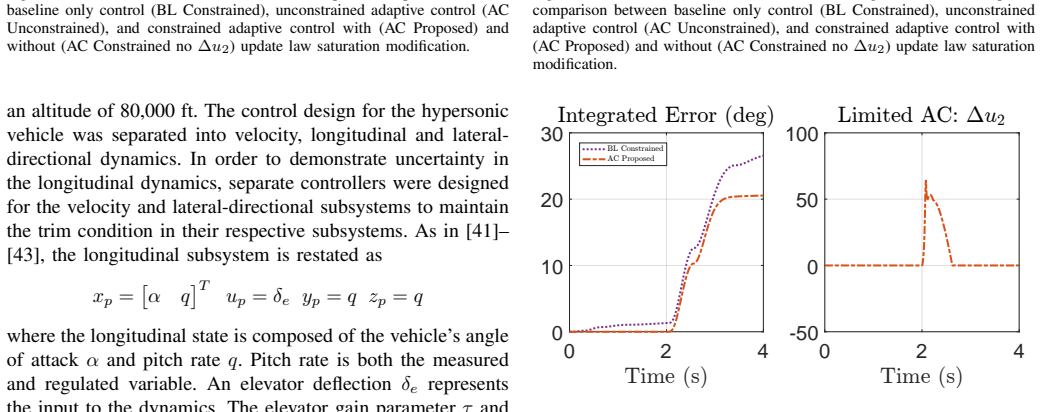
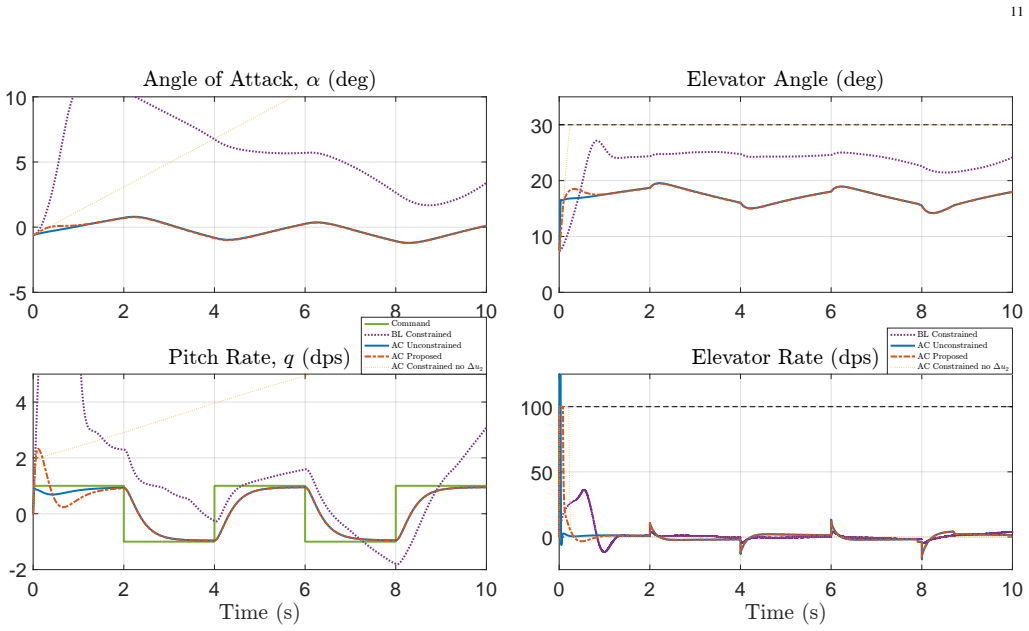
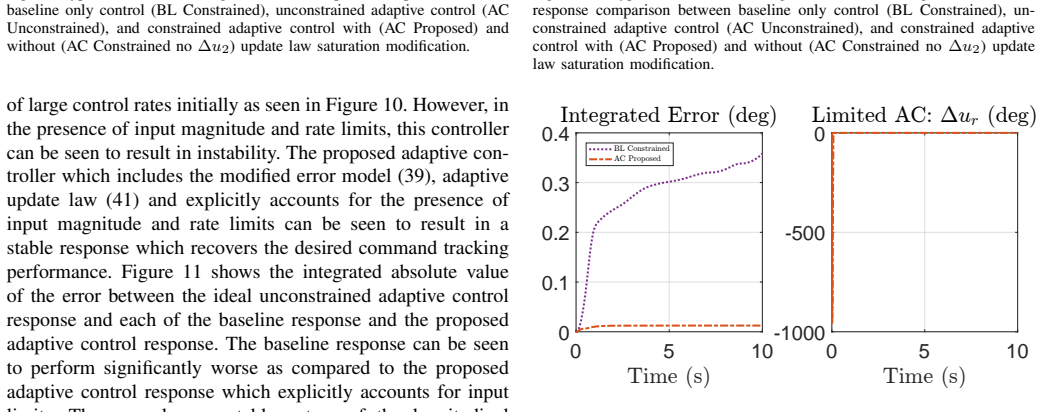
Input constraints as well as parametric uncertainties must be accounted for in the design of safe control systems. This paper presents an adaptive controller for multiple-input-multiple-output (MIMO) plants with input magnitude and rate saturation in the presence of parametric uncertainties. A filter is introduced in the control path to accommodate the presence of rate limits. An output feedback adaptive controller is designed to stabilize the closed loop system even in the presence of this filter. The overall control architecture includes adaptive laws that are modified to account for the magnitude and rate limits. Analytical guarantees of bounded solutions and satisfactory tracking are provided. Three flight control simulations with nonlinear models of the aircraft dynamics are provided to demonstrate the efficacy of the proposed adaptive controller for open loop stable and unstable systems in the presence of uncertainties in the dynamics as well as input magnitude and rate saturation.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims to design an output-feedback adaptive controller for MIMO plants subject to parametric uncertainties and input magnitude/rate saturation. A linear filter is inserted in the control path to handle rate limits; the adaptive laws are modified to account for both magnitude and rate constraints; analytical guarantees of bounded closed-loop solutions and satisfactory tracking are asserted; and the approach is illustrated on three nonlinear aircraft flight simulations covering both open-loop stable and unstable plants.
Significance. If the stability arguments hold and the filter-augmented plant retains the relative-degree and minimum-phase properties required by the chosen output-feedback architecture, the result would be useful for constrained adaptive flight control. The explicit treatment of both magnitude and rate limits together with simulations on unstable open-loop dynamics is a constructive feature.
major comments (2)
- [Abstract and filter-augmentation section] Abstract (controller-architecture paragraph) and the section describing the rate-limit filter: the central claim that an output-feedback adaptive controller can be designed for the augmented plant requires that insertion of the rate-limit filter preserves the relative-degree and minimum-phase properties assumed by the adaptive laws. The manuscript provides no explicit verification or design condition ensuring these properties survive the augmentation, which is load-bearing for the stability argument.
- [Analytical-guarantees section] The section presenting the analytical guarantees: no derivation steps, Lyapunov-function candidates, or explicit error bounds are supplied in the text, so the boundedness and tracking claims rest on uninspectable arguments even though the abstract asserts they exist.
minor comments (1)
- [Simulation section] Simulation section: the three flight examples would benefit from explicit statements of which data points were excluded, initial-condition ranges, and quantitative tracking-error metrics rather than qualitative descriptions.
Simulated Author's Rebuttal
We thank the referee for the constructive comments, which help clarify the presentation of the stability arguments and filter properties. We address each major comment below and will revise the manuscript to incorporate the requested clarifications.
read point-by-point responses
-
Referee: [Abstract and filter-augmentation section] Abstract (controller-architecture paragraph) and the section describing the rate-limit filter: the central claim that an output-feedback adaptive controller can be designed for the augmented plant requires that insertion of the rate-limit filter preserves the relative-degree and minimum-phase properties assumed by the adaptive laws. The manuscript provides no explicit verification or design condition ensuring these properties survive the augmentation, which is load-bearing for the stability argument.
Authors: We agree that explicit verification is required for the claims to be fully supported. The rate-limit filter is a stable, strictly proper linear system whose poles can be placed to ensure the augmented plant retains the original relative degree and minimum-phase property when the original plant satisfies the standard assumptions of the output-feedback MRAC architecture. In the revised manuscript we will add a short subsection (or paragraph) in the filter-augmentation section that states the precise design condition on the filter bandwidth and provides a brief verification that relative degree and minimum-phase character are preserved. revision: yes
-
Referee: [Analytical-guarantees section] The section presenting the analytical guarantees: no derivation steps, Lyapunov-function candidates, or explicit error bounds are supplied in the text, so the boundedness and tracking claims rest on uninspectable arguments even though the abstract asserts they exist.
Authors: The original manuscript states that analytical guarantees exist but presents only the final boundedness and tracking statements without the supporting derivation. We will expand the analytical-guarantees section to include (i) the Lyapunov-function candidate, (ii) the key steps showing that the modified adaptation laws keep the signals bounded despite the saturation filter, and (iii) the resulting uniform ultimate bounds on the tracking error. These additions will make the arguments fully inspectable while preserving the paper’s length constraints. revision: yes
Circularity Check
No circularity; derivation rests on standard MRAC/Lyapunov arguments applied to augmented plant
full rationale
The paper introduces a rate-limit filter in the input path and modifies adaptive laws for magnitude/rate saturation, then claims boundedness and tracking via analytical guarantees for the closed-loop system. No equations or sections in the provided text reduce any prediction or stability result to a fitted parameter, self-defined quantity, or load-bearing self-citation chain. The central architecture is described as an output-feedback adaptive controller whose guarantees follow from the plant retaining relative degree and minimum-phase properties after filter insertion—an assumption stated explicitly rather than derived by construction from the result itself. Standard adaptive control frameworks (MRAC, Lyapunov) are invoked without evidence that the paper's own prior citations are the sole justification or that any step renames a known empirical pattern. The derivation chain is therefore self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Anti-windup synthesis for PIO avoidance in an experimental aircraft,
J. Sofrony, M. C. Turner, I. Postlethwaite, O. Brieger, and D. Leibling, “Anti-windup synthesis for PIO avoidance in an experimental aircraft,” in Proceedings of the 45th IEEE Conference on Decision and Control . IEEE, 2006
work page 2006
-
[2]
Effects of rate limiting elements in flight control systems - a new PIO-criterion,
H. Duda, “Effects of rate limiting elements in flight control systems - a new PIO-criterion,” in AIAA Guidance, Navigation, and Control Conference. AIAA Paper 1995-3204, aug 1995
work page 1995
-
[3]
Analysis of pilot-in-the-loop oscillations due to position and rate saturations,
F. Amato, R. Iervolino, M. Pandit, S. Scala, and L. Verde, “Analysis of pilot-in-the-loop oscillations due to position and rate saturations,” in Proceedings of the 39th IEEE Conference on Decision and Control . IEEE, 2000
work page 2000
-
[4]
Phase compensation of rate limiters in unstable aircraft,
L. Rundqwist and K. Stahl-Gunnarsson, “Phase compensation of rate limiters in unstable aircraft,” in Proceeding of the 1996 IEEE Interna- tional Conference on Control Applications . IEEE, 1996
work page 1996
-
[5]
Phase compensation of rate limiters in JAS 39 gripen,
L. Rundqwist and R. Hillgren, “Phase compensation of rate limiters in JAS 39 gripen,” in 21st Atmospheric Flight Mechanics Conference . American Institute of Aeronautics and Astronautics, jul 1996
work page 1996
-
[6]
K. S. Narendra and A. M. Annaswamy, Stable Adaptive Systems . NJ: Prentice-Hall, Inc., 1989, (out of print)
work page 1989
-
[7]
S. Sastry and M. Bodson, Adaptive Control: Stability, Convergence and Robustness. Prentice-Hall, 1989
work page 1989
-
[8]
K. J. ˚Astr¨om and B. Wittenmark, Adaptive Control: Second Edition . Addison-Wesley Publishing Company, 1995
work page 1995
-
[9]
P. A. Ioannou and J. Sun, Robust Adaptive Control. PTR Prentice-Hall, 1996
work page 1996
-
[10]
K. S. Narendra and A. M. Annaswamy, Stable Adaptive Systems . Prentice Hall, 2005
work page 2005
-
[11]
Adaptive control in the presence of input constraints,
S. P. Karason and A. M. Annaswamy, “Adaptive control in the presence of input constraints,” IEEE Transactions on Automatic Control , vol. 39, no. 11, pp. 2325–2330, 1994
work page 1994
-
[12]
Discrete-time adaptive control in the presence of input constraints,
A. M. Annaswamy and S. P. Karason, “Discrete-time adaptive control in the presence of input constraints,” Automatica, vol. 31, no. 10, pp. 1421–1431, oct 1995
work page 1995
-
[13]
Towards verifiable adaptive control for safety critical applications,
M. Schwager, “Towards verifiable adaptive control for safety critical applications,” Master’s thesis, MIT, 2005. 16
work page 2005
-
[14]
Adaptive control design with guaranteed margins for nonlinear plants,
J. Jang, “Adaptive control design with guaranteed margins for nonlinear plants,” Ph.D. dissertation, MIT, 2009
work page 2009
-
[15]
Stable adaptation in the presence of actuator constraints with flight control applications,
E. Lavretsky and N. Hovakimyan, “Stable adaptation in the presence of actuator constraints with flight control applications,” Journal of Guidance, Control, and Dynamics , vol. 30, no. 2, pp. 337–345, mar 2007
work page 2007
-
[16]
A. Serrani, A. M. Zinnecker, L. Fiorentini, M. A. Bolender, and D. B. Doman, “Integrated adaptive guidance and control of constrained nonlinear air-breathing hypersonic vehicle models,” in 2009 American Control Conference. IEEE, 2009
work page 2009
-
[17]
Flight control system design with rate saturating actuators,
R. A. Hess and S. A. Snell, “Flight control system design with rate saturating actuators,” Journal of Guidance, Control, and Dynamics , vol. 20, no. 1, pp. 90–96, jan 1997
work page 1997
-
[18]
Non-linear anti- windup for manual flight control,
C. Barbu, S. Galeani, A. R. Teel, and L. Zaccarian, “Non-linear anti- windup for manual flight control,” International Journal of Control , vol. 78, no. 14, pp. 1111–1129, sep 2005
work page 2005
-
[19]
A magnitude and rate saturation model and its use in the solution of a static anti-windup problem,
S. Galeani, S. Onori, A. R. Teel, and L. Zaccarian, “A magnitude and rate saturation model and its use in the solution of a static anti-windup problem,” Systems & Control Letters , vol. 57, no. 1, pp. 1–9, jan 2008
work page 2008
-
[20]
Indirect adaptive control for systems with input rate saturation,
N. E. Kahveci and P. A. Ioannou, “Indirect adaptive control for systems with input rate saturation,” in 2008 American Control Conference . IEEE, jun 2008
work page 2008
-
[21]
M. Matsutani, A. Annaswamy, and L. G. Crespo, “Adaptive control in the presence of rate saturation with application to a transport air- craft model,” in AIAA Guidance, Navigation, and Control Conference . American Institute of Aeronautics and Astronautics, aug 2010
work page 2010
-
[22]
Integrator windup and how to avoid it,
K. J. Astrom and L. Rundqwist, “Integrator windup and how to avoid it,” in 1989 American Control Conference . IEEE, jun 1989
work page 1989
-
[23]
K. J. Astrom and B. Wittenmark, Adaptive Control: Second Edition . Dover, 2008
work page 2008
-
[24]
Adaptive control of hypersonic vehicles in the presence of rate limits,
J. E. Gaudio, A. M. Annaswamy, and E. Lavretsky, “Adaptive control of hypersonic vehicles in the presence of rate limits,” in 2018 AIAA Guidance, Navigation, and Control Conference . American Institute of Aeronautics and Astronautics, jan 2018
work page 2018
-
[25]
An adaptive controller for very flexible aircraft,
Z. Qu, A. Annaswamy, and E. Lavretsky, “An adaptive controller for very flexible aircraft,” in AIAA Guidance, Navigation, and Control (GNC) Conference. American Institute of Aeronautics and Astronautics, aug 2013
work page 2013
-
[26]
Z. Qu, A. M. Annaswamy, and E. Lavretsky, “Adaptive output-feedback control for relative degree two systems based on closed-loop reference models,” in 2015 54th IEEE Conference on Decision and Control (CDC) . IEEE, dec 2015
work page 2015
-
[27]
——, “Adaptive output-feedback control for a class of multi-input- multi-output plants with applications to very flexible aircraft,” in 2016 American Control Conference (ACC) . IEEE, jul 2016
work page 2016
-
[28]
Adaptive output-feedback control and applications to very flexible aircraft,
Z. Qu, “Adaptive output-feedback control and applications to very flexible aircraft,” Ph.D. dissertation, MIT, 2016
work page 2016
-
[29]
E. Lavretsky and K. A. Wise, Robust and Adaptive Control with Aerospace Applications. Springer, 2013
work page 2013
-
[30]
Adaptive output feedback design using asymptotic proper- ties of LQG/LTR controllers,
E. Lavretsky, “Adaptive output feedback design using asymptotic proper- ties of LQG/LTR controllers,” IEEE Transactions on Automatic Control , vol. 57, no. 6, pp. 1587–1591, jun 2012
work page 2012
-
[31]
Flight control design using observer-based loop transfer recovery,
K. A. Wise and E. Lavretsky, “Flight control design using observer-based loop transfer recovery,” in AIAA Guidance, Navigation, and Control (GNC) Conference. American Institute of Aeronautics and Astronautics, aug 2013
work page 2013
-
[32]
Design parameter tuning in adaptive observer-based flight control architectures,
K. A. Wise, “Design parameter tuning in adaptive observer-based flight control architectures,” in 2018 AIAA Information Systems-AIAA Infotech @ Aerospace. American Institute of Aeronautics and Astronautics, jan 2018
work page 2018
-
[33]
E. Lavretsky, “Design, analysis, and flight evaluation of a primary control system with observer-based loop transfer recovery and direct adaptive augmentation for the calspan variable stability simulator learjet- 25b aircraft,” in AIAA Scitech 2019 F orum . American Institute of Aeronautics and Astronautics, jan 2019
work page 2019
-
[34]
T. E. Gibson, A. M. Annaswamy, and E. Lavretsky, “Improved transient response in adaptive control using projection algorithms and closed loop reference models,” in AIAA Guidance, Navigation, and Control Conference. AIAA Paper 2012-4775, aug 2012
work page 2012
-
[35]
Adaptive systems with closed-loop reference models, part i: Transient performance,
——, “Adaptive systems with closed-loop reference models, part i: Transient performance,” in American Control Conference . IEEE, jun 2013, pp. 3376–3383
work page 2013
-
[36]
On adaptive control with closed-loop reference models: Tran- sients, oscillations, and peaking,
——, “On adaptive control with closed-loop reference models: Tran- sients, oscillations, and peaking,” IEEE Access , vol. 1, pp. 703–717, 2013
work page 2013
-
[37]
Closed-loop reference model adaptive control: with application to very flexible aircraft,
T. E. Gibson, “Closed-loop reference model adaptive control: with application to very flexible aircraft,” Ph.D. dissertation, MIT, 2014
work page 2014
-
[38]
B. L. Stevens and F. L. Lewis, Aircraft Control and Simulation . Wiley, 2003
work page 2003
-
[39]
Non-linear f-16 simulation using simulink and matlab,
R. S. Russell, “Non-linear f-16 simulation using simulink and matlab,” University of Minnesota, Tech. Rep., 2003. [Online]. Available: http://www.aem.umn.edu/∼balas/darpa sec/software/F16Manual.pdf
work page 2003
-
[40]
L. T. Nguyen, M. E. Ogburn, W. P. Gilbert, K. S. Kibler, P. W. Brown, and P. L. Deal, “Simulator study of stall/post-stall characteristics of a fighter airplane with relaxed longitudinal static stability,” NASA Technical Paper 1538, 1979
work page 1979
-
[41]
Adaptive output feedback based on closed-loop reference models for hypersonic vehicles,
D. P. Wiese, A. M. Annaswamy, J. A. Muse, M. A. Bolender, and E. Lavretsky, “Adaptive output feedback based on closed-loop reference models for hypersonic vehicles,” Journal of Guidance, Control, and Dynamics, vol. 38, no. 12, pp. 2429–2440, dec 2015
work page 2015
-
[42]
Systematic adaptive control design using sequential loop closure,
D. P. Wiese, “Systematic adaptive control design using sequential loop closure,” Ph.D. dissertation, Massachusetts Institute of Technology, 2016
work page 2016
-
[43]
Sequential loop closure based adaptive output feedback,
D. P. Wiese, A. M. Annaswamy, J. A. Muse, M. A. Bolender, and E. Lavretsky, “Sequential loop closure based adaptive output feedback,” IEEE Access , vol. 5, pp. 23 436–23 451, 2017
work page 2017
-
[44]
J.-J. E. Slotine and W. Li, Applied Nonlinear Control . Prentice-Hall, 1991
work page 1991
-
[45]
Robust adaptive control in the presence of unmodeled dynamics,
H. S. Hussain, “Robust adaptive control in the presence of unmodeled dynamics,” Ph.D. dissertation, MIT, 2017
work page 2017
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.