Trajectory Prediction for Autonomous Driving: Progress, Limitations, and Future Directions
Pith reviewed 2026-05-23 01:35 UTC · model grok-4.3
The pith
A review of trajectory prediction methods organizes them into a taxonomy and identifies remaining challenges for autonomous driving.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
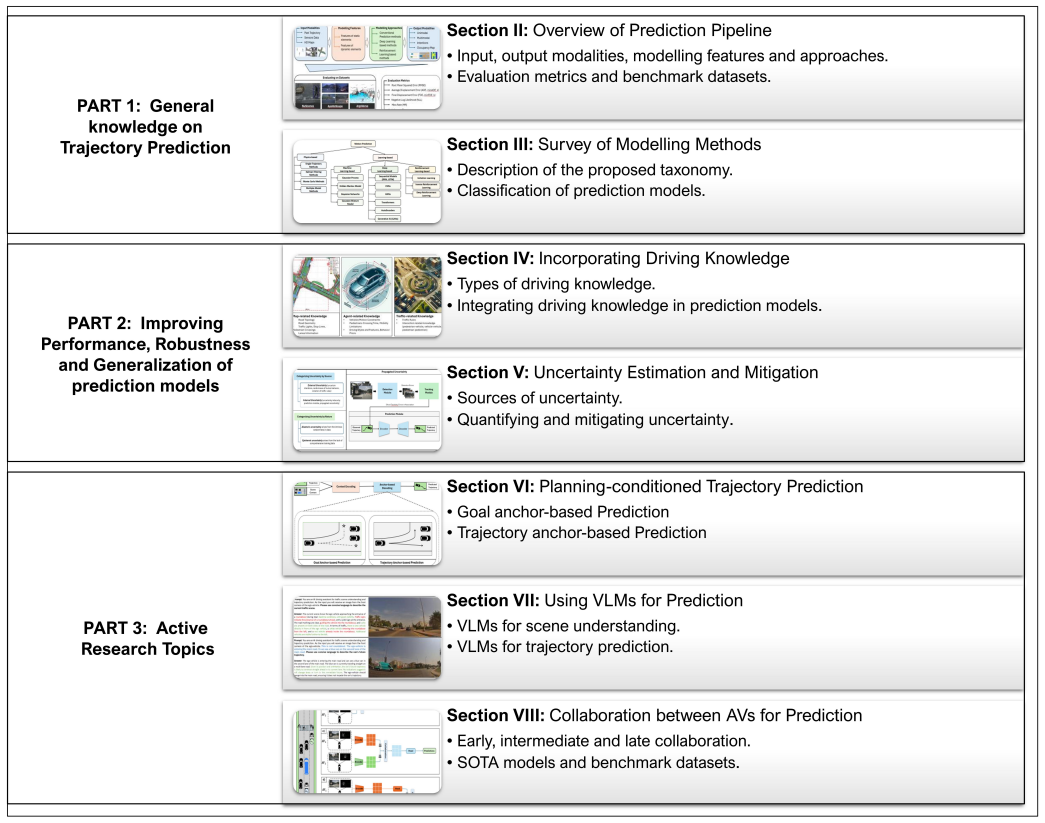
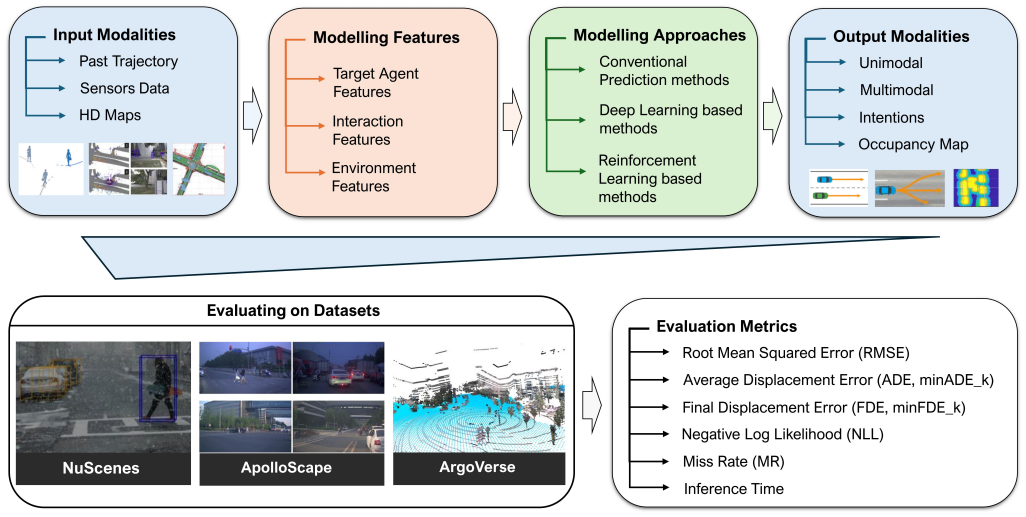
By surveying a substantial portion of recent trajectory prediction methods, the authors propose a taxonomy to classify existing solutions and provide a general overview of the prediction pipeline covering input and output modalities, modeling features, and prediction paradigms. The paper discusses active research areas, addresses posed research questions, and highlights remaining research gaps and challenges in the field.
What carries the argument
The taxonomy classifying trajectory prediction solutions based on their approaches and the overview of the prediction pipeline.
If this is right
- The classification helps distinguish between different prediction paradigms and their strengths.
- Identified gaps guide future research directions in trajectory forecasting.
- The pipeline overview aids in understanding how inputs from sensors lead to trajectory outputs.
- Active areas indicate where improvements in accuracy and robustness are needed.
Where Pith is reading between the lines
- The taxonomy might serve as a framework for comparing new algorithms quantitatively.
- Closing the highlighted gaps could improve the reliability of autonomous vehicles in complex urban scenarios.
- Connections to multi-agent systems in robotics could be explored using similar classification.
Load-bearing premise
The selected body of recent methods is representative of the field and the proposed taxonomy accurately captures the meaningful differences among approaches without major omissions or overlaps.
What would settle it
Discovery of a significant number of trajectory prediction methods from the past decade that do not fit the proposed taxonomy or were overlooked in the review would challenge the paper's claims about coverage and classification.
Figures










read the original abstract
As the potential for autonomous vehicles to be integrated on a large scale into modern traffic systems continues to grow, ensuring safe navigation in dynamic environments is crucial for smooth integration. To guarantee safety and prevent collisions, autonomous vehicles must be capable of accurately predicting the trajectories of surrounding traffic agents. Over the past decade, significant efforts from both academia and industry have been dedicated to designing solutions for precise trajectory forecasting. These efforts have produced a diverse range of approaches, raising questions about the differences between these methods and whether trajectory prediction challenges have been fully addressed. This paper reviews a substantial portion of recent trajectory prediction methods proposing a taxonomy to classify existing solutions. A general overview of the prediction pipeline is also provided, covering input and output modalities, modeling features, and prediction paradigms existing in the literature. In addition, the paper discusses active research areas within trajectory prediction, addresses the posed research questions, and highlights the remaining research gaps and challenges.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. This paper reviews a substantial portion of recent trajectory prediction methods for autonomous driving. It proposes a taxonomy to classify existing solutions, provides a general overview of the prediction pipeline (covering input/output modalities, modeling features, and prediction paradigms), discusses active research areas, addresses posed research questions, and highlights remaining research gaps and challenges.
Significance. If the taxonomy is justified by the reviewed papers, the coverage is comprehensive without major omissions or overlaps, and the discussion of gaps is evidence-based, the survey would offer a useful structured overview to help organize the literature and guide future work in trajectory prediction for AVs.
major comments (2)
- [Taxonomy and classification section] The central claim that the proposed taxonomy accurately classifies existing solutions without major omissions or overlaps is load-bearing but not demonstrated in detail; the manuscript should explicitly map the reviewed methods to taxonomy categories with examples from specific papers to substantiate the classification scheme.
- [Introduction and review methodology] The claim of reviewing 'a substantial portion' of recent methods requires clearer criteria for paper selection (e.g., time period, venues, keywords) and a quantitative summary (number of papers per category) to allow assessment of representativeness.
minor comments (2)
- [Abstract] The abstract could be expanded to include the approximate number of reviewed papers and the covered time span for better context.
- [References] Ensure all cited works in the taxonomy discussion are consistently referenced with full bibliographic details.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive comments. We address each major comment below and will incorporate the suggested improvements into a revised manuscript.
read point-by-point responses
-
Referee: [Taxonomy and classification section] The central claim that the proposed taxonomy accurately classifies existing solutions without major omissions or overlaps is load-bearing but not demonstrated in detail; the manuscript should explicitly map the reviewed methods to taxonomy categories with examples from specific papers to substantiate the classification scheme.
Authors: We agree that the taxonomy would benefit from more explicit substantiation. In the revised version we will add a dedicated subsection (or table) that maps representative papers to each taxonomy category, citing specific methods and briefly noting how their design choices align with the category definitions. This will directly demonstrate coverage and lack of major overlaps. revision: yes
-
Referee: [Introduction and review methodology] The claim of reviewing 'a substantial portion' of recent methods requires clearer criteria for paper selection (e.g., time period, venues, keywords) and a quantitative summary (number of papers per category) to allow assessment of representativeness.
Authors: We accept this point. The revised introduction will explicitly state the search period (2015–2024), target venues, and keyword combinations used. We will also insert a quantitative summary (e.g., a table or paragraph) reporting the number of papers retained per taxonomy category, allowing readers to evaluate representativeness directly. revision: yes
Circularity Check
Review paper with no internal derivations or predictions
full rationale
This is a survey paper whose core contribution is a descriptive taxonomy and overview of existing trajectory prediction methods drawn from the literature. No original equations, fitted parameters, uniqueness theorems, or predictions are derived within the paper itself; all substantive content is attributed to external citations. The representativeness of the reviewed set is a matter of scholarly selection rather than a self-referential derivation that reduces to its own inputs. Consequently there are no load-bearing steps that can be shown to be circular by the paper's own text.
Axiom & Free-Parameter Ledger
Forward citations
Cited by 1 Pith paper
-
Frozen LLMs as Map-Aware Spatio-Temporal Reasoners for Vehicle Trajectory Prediction
A framework encodes observed trajectories and HD maps into tokens for frozen LLMs to perform spatio-temporal reasoning and predict future vehicle paths with a linear decoder.
Reference graph
Works this paper leans on
-
[1]
T. Salzmann, B. Ivanovic, P. Chakravarty, M. Pavone, Trajectron++: Dynamically-feasible trajectory fore- casting with heterogeneous data, in: Computer Vision – ECCV 2020: 16th European Confer- ence, Glasgow, UK, August 23–28, 2020, Pro- ceedings, Part XVIII, Springer-Verlag, Berlin, Heidelberg, 2020, p. 683–700. URL:https: //doi.org/10.1007/978-3-030-5852...
-
[2]
W. Chen, F. Wang, H. Sun, S2tnet: Spatio-temporal transformer networks for trajectory prediction in au- tonomous driving, in: V . N. Balasubramanian, I. Tsang (Eds.), Proceedings of The 13th Asian Con- ference on Machine Learning, volume 157 ofProceed- ings of Machine Learning Research, PMLR, 2021, pp. 454–469. URL:https://proceedings.mlr.press/ v157/chen21a.html
work page 2021
-
[3]
B. Varadarajan, A. Hefny, A. Srivastava, K. S. Re- faat, N. Nayakanti, A. Cornman, K. Chen, B. Douil- lard, C. P. Lam, D. Anguelov, B. Sapp, Multipath++: Efficient information fusion and trajectory aggregation for behavior prediction, in: 2022 International Con- ference on Robotics and Automation (ICRA), IEEE Press, 2022, p. 7814–7821. URL:https://doi.org...
-
[4]
A Survey on Trajectory -Prediction Methods for Autonomous Driving,
Y . Huang, J. Du, Z. Yang, Z. Zhou, L. Zhang, H. Chen, A survey on trajectory-prediction methods for autonomous driving, IEEE Transactions on Intelligent Vehicles 7 (2022) 652–674. doi:10.1109/TIV.2022.3167103
-
[5]
V . Bharilya, N. Kumar, Machine learning for au- tonomous vehicle’s trajectory prediction: A comprehen- sive survey, challenges, and future research directions, Vehicular Communications 46 (2024) 100733. URL: https://www.sciencedirect.com/science/ article/pii/S2214209624000081. doi:https: //doi.org/10.1016/j.vehcom.2024.100733
-
[6]
J. Liu, X. Mao, Y . Fang, D. Zhu, M. Q. Meng, A survey on deep-learning approaches for vehicle trajec- tory prediction in autonomous driving, 2021 IEEE International Conference on Robotics and Biomimet- ics (ROBIO) (2021) 978–985. URL:https://api. semanticscholar.org/CorpusID:239049431
work page 2021
-
[7]
I. Teeti, S. Khan, A. Shahbaz, A. Bradley, F. Cuz- zolin, Vision-based intention and trajectory predic- tion in autonomous vehicles: A survey, in: L. D. Raedt (Ed.), Proceedings of the Thirty-First Interna- tional Joint Conference on Artificial Intelligence, IJCAI 2022, Vienna, Austria, 23-29 July 2022, ijcai.org, 2022, pp. 5630–5637. URL:https://doi.org/...
-
[8]
F. Leon, M. Gavrilescu, A review of tracking and trajec- tory prediction methods for autonomous driving, Math- ematics 9 (2021). URL:https://www.mdpi.com/ 2227-7390/9/6/660. doi:10.3390/math9060660
-
[10]
Z. Ding, H. Zhao, Incorporating driving knowledge in deep learning based vehicle trajectory prediction: A sur- vey, IEEE Transactions on Intelligent Vehicles (2023) 1–20. doi:10.1109/TIV.2023.3266446
-
[12]
A. Rudenko, L. Palmieri, M. Herman, K. M. Kitani, D. M. Gavrila, K. O. Arras, Hu- man motion trajectory prediction: A survey, Int. J. Rob. Res. 39 (2020) 895–935. URL: https://doi.org/10.1177/0278364920917446. doi:10.1177/0278364920917446
-
[13]
B. I. Sighencea, R. I. Stanciu, C. D. C ˘aleanu, A re- view of deep learning-based methods for pedestrian tra- jectory prediction, Sensors 21 (2021). URL:https: //www.mdpi.com/1424-8220/21/22/7543
work page 2021
-
[14]
R. Korbmacher, A. Tordeux, Review of pedestrian tra- jectory prediction methods: Comparing deep learning and knowledge-based approaches, IEEE Transactions on Intelligent Transportation Systems 23 (2022) 24126– 24144. doi:10.1109/TITS.2022.3205676
-
[16]
I. P. Gomes, D. F. Wolf, A review on intention-aware and interaction-aware trajectory prediction for autonomous vehicles, 2022. doi:10.36227/techrxiv.19337447. v1
-
[17]
In: Proceedings of the IEEE/CVF Conference on Computer 25 Vision and Pattern Recognition, pp
H. Caesar, V . Bankiti, A. H. Lang, S. V ora, V . E. Liong, Q. Xu, A. Krishnan, Y . Pan, G. Baldan, O. Beijbom, nuScenes: A Multimodal Dataset for Autonomous Driv- ing , in: 2020 IEEE/CVF Conference on Computer Vi- sion and Pattern Recognition (CVPR), IEEE Computer Society, Los Alamitos, CA, USA, 2020, pp. 11618– 11628. URL:https://doi.ieeecomputersociety...
-
[18]
L. Ye, Z. Zhou, J. Wang, Improving the generaliz- ability of trajectory prediction models with frenét-based domain normalization, in: 2023 IEEE International Conference on Robotics and Automation (ICRA), IEEE, 2023, p. 11562–11568. URL:http://dx.doi.org/ 10.1109/ICRA48891.2023.10160788. doi:10.1109/ icra48891.2023.10160788
-
[20]
A. Zyner, S. Worrall, E. Nebot, A recurrent neural net- work solution for predicting driver intention at unsignal- ized intersections, IEEE Robotics and Automation Letters 3 (2018) 1759–1764. doi:10.1109/LRA.2018. 2805314
- [21]
-
[22]
S. Park, B. Kim, C. M. Kang, C. C. Chung, J. W. Choi, Sequence-to-sequence prediction of vehicle tra- jectory via lstm encoder-decoder architecture, 2018 IEEE Intelligent Vehicles Symposium (IV) (2018) 1672–
work page 2018
-
[23]
URL:https://api.semanticscholar.org/ CorpusID:3653452
-
[24]
D. J. Phillips, T. A. Wheeler, M. J. Kochenderfer, Gen- eralizable intention prediction of human drivers at in- tersections, 2017 IEEE Intelligent Vehicles Sympo- sium (IV) (2017) 1665–1670. URL:https://api. semanticscholar.org/CorpusID:27006002
work page 2017
-
[25]
S. Dai, L. Li, Z. Li, Modeling vehicle interactions via modified lstm models for trajectory prediction, IEEE Access 7 (2019) 38287–38296. doi:10.1109/ACCESS. 2019.2907000
-
[26]
W. Ding, S. Shen, Online vehicle trajectory predic- tion using policy anticipation network and optimization- based context reasoning, 2019 International Confer- ence on Robotics and Automation (ICRA) (2019) 9610–
work page 2019
-
[27]
URL:https://api.semanticscholar.org/ CorpusID:67856564
- [28]
-
[29]
Y . Hu, W. Zhan, M. Tomizuka, Probabilistic predic- tion of vehicle semantic intention and motion, 2018 IEEE Intelligent Vehicles Symposium (IV) (2018) 307–
work page 2018
-
[30]
URL:https://api.semanticscholar.org/ CorpusID:4754151
-
[31]
W. Ding, J. Chen, S. Shen, Predicting vehicle be- haviors over an extended horizon using behavior in- teraction network, 2019 International Conference on Robotics and Automation (ICRA) (2019) 8634–
work page 2019
-
[32]
URL:https://api.semanticscholar.org/ CorpusID:67856192
-
[34]
X. Song, K. Chen, X. Li, J. Sun, B. Hou, Y . Cui, B. Zhang, G. Xiong, Z. Wang, Pedestrian trajectory prediction based on deep convolutional lstm network, 52 IEEE Transactions on Intelligent Transportation Sys- tems 22 (2021) 3285–3302. doi:10.1109/TITS.2020. 2981118
-
[35]
Y . Ma, et al., An intelligence-based approach for predic- tion of microscopic pedestrian walking behavior, IEEE Transactions on Intelligent Transportation Systems 20 (2019) 3964–3980
work page 2019
-
[36]
S. Carrasco, D. F. Llorca, M. Á. Sotelo, Scout: Socially-consistent and understandable graph attention network for trajectory prediction of vehicles and vrus, 2021 IEEE Intelligent Vehicles Symposium (IV) (2021) 1501–1508. URL:https://api.semanticscholar. org/CorpusID:231918397
work page 2021
- [37]
-
[38]
R. Qian, X. Lai, X. Li, 3d object detection for au- tonomous driving: A survey, Pattern Recognition 130 (2022) 108796
work page 2022
-
[39]
J. Mao, S. Shi, X. Wang, H. Li, 3d object detection for autonomous driving: A comprehensive survey, Inter- national Journal of Computer Vision 131 (2023) 1909– 1963
work page 2023
-
[40]
P. K. Vinodkumar, D. Karabulut, E. Avots, C. Ozci- nar, G. Anbarjafari, A survey on deep learning based segmentation, detection and classification for 3d point clouds, Entropy 25 (2023)
work page 2023
-
[41]
G. P. Meyer, A. Laddha, E. Kee, C. Vallespi-Gonzalez, C. K. Wellington, Lasernet: An efficient probabilistic 3d object detector for autonomous driving, in: 2019 IEEE/CVF Conference on Computer Vision and Pat- tern Recognition (CVPR), IEEE Computer Society, Los Alamitos, CA, USA, 2019, pp. 12669–12678
work page 2019
-
[42]
B. Li, 3d fully convolutional network for vehicle de- tection in point cloud, in: 2017 IEEE/RSJ Interna- tional Conference on Intelligent Robots and Systems (IROS), 2017, pp. 1513–1518. doi:10.1109/IROS. 2017.8205955
-
[43]
H. Wang, B. Wang, B. Liu, X. Meng, G. Yang, Pedestrian recognition and tracking using 3d lidar for autonomous vehicle, Robotics and Autonomous Systems 88 (2017) 71–78. URL: https://www.sciencedirect.com/science/ article/pii/S0921889015302633. doi:https: //doi.org/10.1016/j.robot.2016.11.014
-
[44]
H. Wang, X. Lou, Y . Cai, L. Chen, A 64-line lidar-based road obstacle sensing algorithm for intelligent vehicles, Scientific Programming 2018 (2018) 6385104. URL: https://doi.org/10.1155/2018/6385104. doi:10. 1155/2018/6385104
-
[45]
N. Peri, J. Luiten, M. Li, A. Ošep, L. Leal-Taixé, D. Ra- manan, Forecasting from lidar via future object detec- tion, in: 2022 IEEE/CVF Conference on Computer Vi- sion and Pattern Recognition (CVPR), 2022, pp. 17181– 17190. doi:10.1109/CVPR52688.2022.01669
-
[46]
W. Luo, B. Yang, R. Urtasun, Fast and furious: Real time end-to-end 3d detection, tracking and motion forecasting with a single convolutional net, in: 2018 IEEE/CVF Conference on Computer Vision and Pattern Recogni- tion (CVPR), IEEE Computer Society, Los Alamitos, CA, USA, 2018, pp. 3569–3577. URL:https: //doi.ieeecomputersociety.org/10.1109/ CVPR.2018.0...
- [47]
-
[48]
H. Wu, J. Deng, C. Wen, X. Li, C. Wang, Casa: A cas- cade attention network for 3d object detection from lidar point clouds, IEEE Transactions on Geoscience and Re- mote Sensing (2022)
work page 2022
-
[49]
H. Wu, C. Wen, S. Shi, X. Li, C. Wang, Virtual sparse convolution for multimodal 3d object detection, in: 2023 IEEE/CVF Conference on Computer Vision and Pat- tern Recognition (CVPR), IEEE Computer Society, Los Alamitos, CA, USA, 2023, pp. 21653–21662
work page 2023
- [50]
-
[51]
L. Neumann, A. Vedaldi, Pedestrian and ego-vehicle trajectory prediction from monocular camera, in: Pro- ceedings of the IEEE/CVF Conference on Computer Vi- sion and Pattern Recognition (CVPR), 2021, pp. 10204– 10212
work page 2021
-
[52]
A. MANGLIK, X. WENG, E. OHN-BAR, K. KITANI, Future near-collision prediction from monocular video: Feasibility, dataset, and challenges, IEEE/RSJ Inter- national Conference on Intelligent Robots and Systems (2019)
work page 2019
-
[53]
G. Rizzoli, F. Barbato, P. Zanuttigh, Multimodal seman- tic segmentation in autonomous driving: A review of current approaches and future perspectives, Technolo- gies 10 (2022). 53
work page 2022
-
[54]
X. Yan, S. Hu, Y . Mao, Y . Ye, H. Yu, Deep multi- view learning methods: A review, Neurocomputing 448 (2021) 106–129
work page 2021
-
[55]
A. Loukkal, Y . Grandvalet, T. Drummond, Y . Li, Driv- ing among flatmobiles: Bird-eye-view occupancy grids from a monocular camera for holistic trajectory plan- ning, in: Proceedings of the IEEE/CVF Winter Con- ference on Applications of Computer Vision (W ACV), 2021, pp. 51–60
work page 2021
-
[56]
J. Zhong, H. Sun, W. Cao, Z. He, Pedestrian motion trajectory prediction with stereo-based 3d deep pose es- timation and trajectory learning, IEEE Access 8 (2020) 23480–23486. doi:10.1109/ACCESS.2020.2969994
-
[57]
A. Bhattacharyya, M. Fritz, B. Schiele, Long-term on-board prediction of people in traffic scenes under uncertainty, 2018 IEEE/CVF Conference on Com- puter Vision and Pattern Recognition (2017) 4194–
work page 2018
-
[58]
URL:https://api.semanticscholar.org/ CorpusID:19515346
-
[59]
N. A. Madjid, A. Sharma, B. Hassan, N. Werghi, J. Dias, M. Khonji, Multi-target tracker for low light vision, in: 2023 21st International Conference on Advanced Robotics (ICAR), IEEE, 2023, pp. 252–257
work page 2023
-
[60]
H. H. Meinel, Evolving automotive radar — from the very beginnings into the future, The 8th Euro- pean Conference on Antennas and Propagation (Eu- CAP 2014) (2014) 3107–3114. URL:https://api. semanticscholar.org/CorpusID:24735994
work page 2014
- [61]
-
[62]
J. Hasch, Driving towards 2020: Automotive radar technology trends, IEEE MTT-S International Confer- ence on Microwaves for Intelligent Mobility (ICMIM) (2015) 1–4. URL:https://api.semanticscholar. org/CorpusID:14729074
work page 2020
- [63]
-
[64]
D. Steinhauser, P. Held, A. Kamann, A. Koch, T. Brand- meier, Micro-doppler extraction of pedestrian limbs for high resolution automotive radar, 2019 IEEE Intelligent Vehicles Symposium (IV) (2019) 764–769
work page 2019
-
[65]
B. Major, D. Fontijne, A. Ansari, R. T. Sukhavasi, R. Gowaiker, M. A. Hamilton, S. Lee, S. K. Grzechnik, S. Subramanian, Vehicle detection with automotive radar using deep learning on range-azimuth-doppler tensors, 2019 IEEE/CVF International Conference on Computer Vision Workshop (ICCVW) (2019) 924–932
work page 2019
- [66]
-
[67]
D. Lee, Y . P. Kwon, S. McMains, J. K. Hedrick, Convo- lution neural network-based lane change intention pre- diction of surrounding vehicles for acc, 2017 IEEE 20th International Conference on Intelligent Transporta- tion Systems (ITSC) (2017) 1–6. URL:https://api. semanticscholar.org/CorpusID:3902524
work page 2017
-
[68]
H. Cui, V . Radosavljevic, F.-C. Chou, T.-H. Lin, T. Nguyen, T.-K. Huang, J. Schneider, N. Djuric, Multi- modal trajectory predictions for autonomous driving us- ing deep convolutional networks, in: 2019 International Conference on Robotics and Automation (ICRA), IEEE Press, 2019, p. 2090–2096. doi:10.1109/ICRA.2019. 8793868
-
[69]
N. Deo, M. M. Trivedi, Convolutional social pooling for vehicle trajectory prediction, in: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR) Workshops, 2018
work page 2018
-
[70]
T. Zhao, Y . Xu, M. Monfort, W. Choi, C. L. Baker, Y . Zhao, Y . Wang, Y . N. Wu, Multi-agent tensor fu- sion for contextual trajectory prediction, in: IEEE Con- ference on Computer Vision and Pattern Recognition, CVPR 2019, Long Beach, CA, USA, June 16-20, 2019, Computer Vision Foundation/IEEE, 2019, pp. 12126– 12134. doi:10.1109/CVPR.2019.01240
-
[71]
N. Lee, W. Choi, P. Vernaza, C. B. Choy, P. H. S. Torr, M. Chandraker, Desire: Distant future prediction in dynamic scenes with interacting agents, 2017 IEEE Conference on Computer Vision and Pattern Recogni- tion (CVPR) (2017) 2165–2174. URL:https://api. semanticscholar.org/CorpusID:8394584
work page 2017
-
[72]
P. Li, S. Ding, X. Chen, N. Hanselmann, M. Cordts, J. Gall, Powerbev: a powerful yet lightweight framework for instance prediction in bird’s-eye view, in: Proceedings of the Thirty-Second International Joint Conference on Artificial Intelligence, IJCAI ’23,
-
[73]
URL:https://doi.org/10.24963/ijcai. 2023/120. doi:10.24963/ijcai.2023/120
- [74]
-
[75]
B. Wilson, W. Qi, T. Agarwal, J. Lambert, J. Singh, S. Khandelwal, B. Pan, R. Kumar, A. Hartnett, J. K. Pontes, D. Ramanan, P. Carr, J. Hays, Argoverse 2: 54 Next generation datasets for self-driving perception and forecasting, in: Proceedings of the Neural Information Processing Systems Track on Datasets and Benchmarks (NeurIPS Datasets and Benchmarks 20...
work page 2021
-
[77]
C. Schlauch, C. Wirth, N. Klein, Informed priors for knowledge integration in trajectory prediction, in: D. Koutra, C. Plant, M. Gomez Rodriguez, E. Baralis, F. Bonchi (Eds.), Machine Learning and Knowledge Dis- covery in Databases: Research Track, Springer Nature Switzerland, Cham, 2023, pp. 392–407
work page 2023
-
[78]
N. Djuric, H. Cui, Z. Su, S. Wu, H. Wang, F.-C. Chou, L. S. Martin, S. Feng, R. Hu, Y . Xu, A. Dayan, S. Zhang, B. C. Becker, G. P. Meyer, C. Vallespi-Gonzalez, C. K. Wellington, Multixnet: Multiclass multistage multi- modal motion prediction, 2021 IEEE Intelligent Vehi- cles Symposium (IV) (2020) 435–442. URL:https:// api.semanticscholar.org/CorpusID:219259836
work page 2021
-
[79]
J. Gao, C. Sun, H. Zhao, Y . Shen, D. Anguelov, C. Li, C. Schmid, Vectornet: Encoding hd maps and agent dy- namics from vectorized representation, 2020 IEEE/CVF Conference on Computer Vision and Pattern Recog- nition (CVPR) (2020) 11522–11530. URL:https:// api.semanticscholar.org/CorpusID:218581144
work page 2020
- [80]
-
[81]
Z. Zhou, J. Wang, Y .-H. Li, Y .-K. Huang, Query-centric trajectory prediction, in: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recogni- tion, 2023, pp. 17863–17873
work page 2023
-
[82]
Y . Liu, T. Yuan, Y . Wang, Y . Wang, H. Zhao, Vectormap- net: end-to-end vectorized hd map learning, in: Proceed- ings of the 40th International Conference on Machine Learning, ICML’23, JMLR.org, 2023
work page 2023
-
[83]
Q. Li, Y . Wang, Y . Wang, H. Zhao, Hdmapnet: An online hd map construction and evaluation framework, 2022 International Conference on Robotics and Automa- tion (ICRA) (2021) 4628–4634. URL:https://api. semanticscholar.org/CorpusID:235829810
work page 2022
-
[84]
J. Philion, S. Fidler, Lift, splat, shoot: Encoding im- ages from arbitrary camera rigs by implicitly unproject- ing to 3d, in: Proceedings of the European Conference on Computer Vision, 2020
work page 2020
-
[85]
In: Proceedings of the IEEE/CVF Conference on Computer 25 Vision and Pattern Recognition, pp
T. Roddick, R. Cipolla, Predicting semantic map rep- resentations from images using pyramid occupancy net- works, in: 2020 IEEE/CVF Conference on Computer Vi- sion and Pattern Recognition (CVPR), 2020, pp. 11135– 11144. doi:10.1109/CVPR42600.2020.01115
-
[86]
Y . Zhou, H. Zhang, J. Yu, Y . Yang, S. Jung, S.-I. Park, B. Yoo, Himap: Hybrid representation learning for end-to-end vectorized hd map construction, in: 2024 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), IEEE Computer Society, Los Alamitos, CA, USA, 2024, pp. 15396–15406. URL:https://doi.ieeecomputersociety. org/10.1109/CVPR5273...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.