Scale-Invariant Sampling in Multi-Arm Bandit Motion Planning for Object Extraction
Pith reviewed 2026-05-10 13:02 UTC · model grok-4.3
The pith
Scale-invariant sampling boosts object extraction success rates by an order of magnitude in most tested scenarios.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
A scale-invariant sampling strategy that first uses a grow-shrink search to identify high-entropy scales and then applies PCA to select principal directions for extraction motions, when embedded in an MAB-RRT planner, raises success rates by one order of magnitude over uniform sampling, obstacle-based sampling, narrow-passage sampling, mate vectors, physics-based planning, and disassembly breadth-first search on seven of eight challenging 3D object extraction scenarios involving bolts, gears, rods, pins, and sockets.
What carries the argument
scale-invariant sampling that combines grow-shrink search for high-entropy scales with PCA for direction selection inside an MAB-RRT planner
If this is right
- Disassembly tasks with millimeter-scale clearances become solvable by general planners without custom per-object tuning.
- Sampling effort concentrates on scales that actually produce collision-free extraction trajectories rather than wasting samples on irrelevant resolutions.
- Multi-arm bandit RRT planners gain a practical way to handle narrow passages that defeat uniform and local sampling heuristics.
- The same scale-finding step can be reused across different object geometries such as bolts, gears, rods, and sockets.
Where Pith is reading between the lines
- The grow-shrink plus PCA pattern may transfer to other narrow-passage problems such as assembly sequencing or navigation through cluttered environments.
- Entropy-driven scale selection could reduce dependence on physics simulation inside disassembly planners by focusing samples before contact is modeled.
- Extending the search to dynamic or higher-dimensional configuration spaces might reveal whether the identified scales remain stable under added degrees of freedom.
Load-bearing premise
The grow-shrink search reliably identifies high-entropy scales that generalize across scenarios and the PCA directions correspond to useful object extraction motions without additional tuning.
What would settle it
Running the same eight scenarios with the grow-shrink and PCA components disabled and finding no meaningful difference in success rates from the listed baseline strategies would falsify the central claim.
Figures


read the original abstract
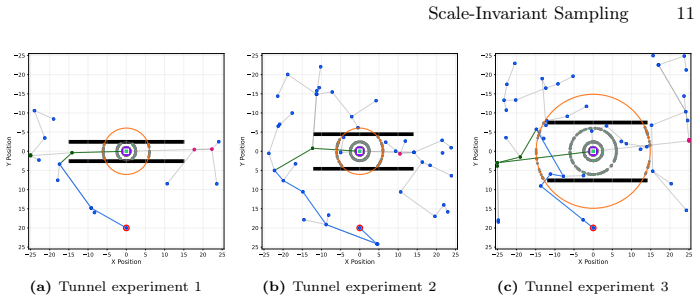
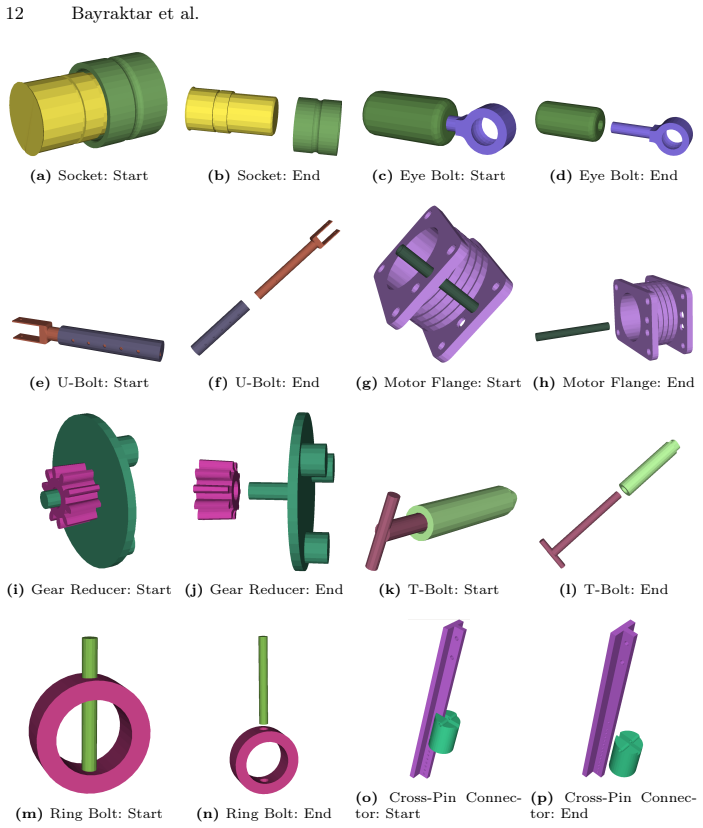
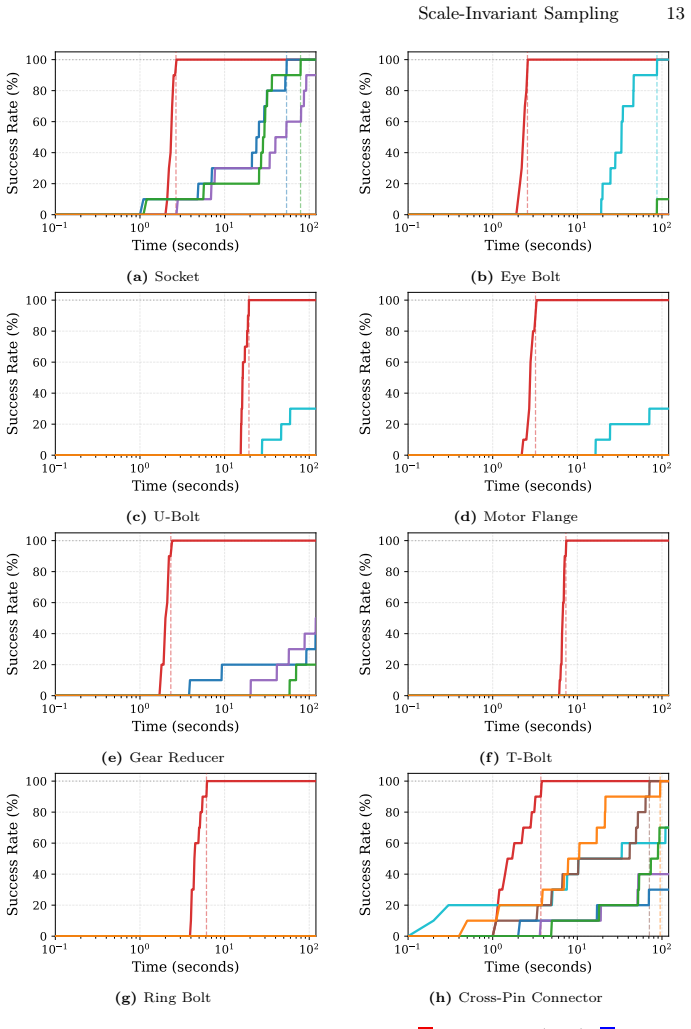
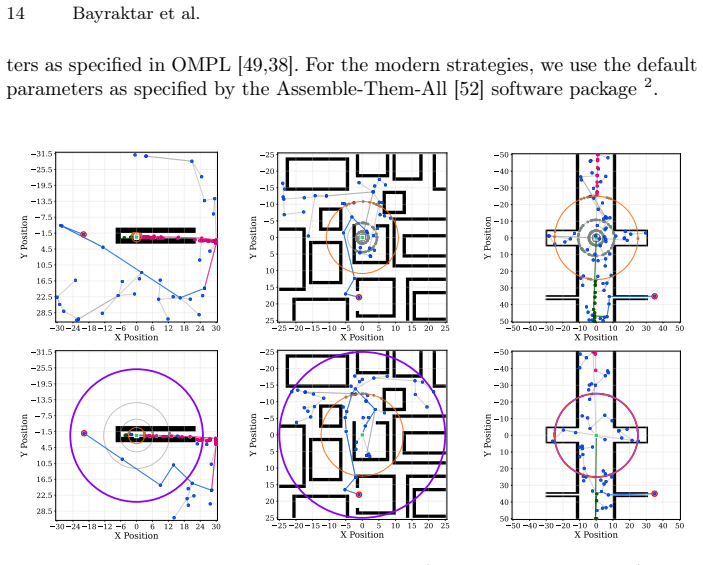
Object extraction tasks often occur in disassembly problems, where bolts, screws, or pins have to be removed from tight, narrow spaces. In such problems, the distance to the environment is often on the millimeter scale. Sampling-based planners can solve such problems and provide completeness guarantees. However, sampling becomes a bottleneck, since almost all motions will result in collisions with the environment. To overcome this problem, we propose a novel scale-invariant sampling strategy which explores the configuration space using a grow-shrink search to find useful, high-entropy sampling scales. Once a useful sampling scale has been found, our framework exploits this scale by using a principal components analysis (PCA) to find useful directions for object extraction. We embed this sampler into a multi-arm bandit rapidly-exploring random tree (MAB-RRT) planner and test it on eight challenging 3D object extraction scenarios, involving bolts, gears, rods, pins, and sockets. To evaluate our framework, we compare it with classical sampling strategies like uniform sampling, obstacle-based sampling, and narrow-passage sampling, and with modern strategies like mate vectors, physics-based planning, and disassembly breadth first search. Our experiments show that scale-invariant sampling improves success rate by one order of magnitude on 7 out of 8 scenarios. This demonstrates that scale-invariant sampling is an important concept for general purpose object extraction in disassembly tasks.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces a scale-invariant sampling approach for sampling-based motion planning in tight object extraction scenarios. It employs a grow-shrink search to identify high-entropy scales in configuration space, followed by PCA to extract principal directions for biased sampling within an MAB-RRT planner. Through experiments on eight 3D scenarios involving bolts, gears, rods, pins, and sockets, the method is shown to outperform classical (uniform, obstacle-based, narrow-passage) and modern (mate vectors, physics-based, disassembly BFS) sampling strategies, achieving up to an order of magnitude higher success rates on seven of the eight test cases.
Significance. The proposed integration of grow-shrink scale search with PCA-based directional sampling in a multi-armed bandit RRT framework addresses a key challenge in narrow-passage motion planning for object extraction. If the reported gains are statistically robust and the method generalizes without extensive tuning, it could advance practical robotics applications in disassembly and maintenance tasks. The empirical comparison to multiple baselines is a strength, but the absence of detailed methodology for scale selection and statistical validation reduces the current significance.
major comments (3)
- [Experimental Results] Experimental Results section: The central claim of an order-of-magnitude success-rate improvement on 7 out of 8 scenarios is presented without reporting the number of independent trials, statistical significance tests (e.g., p-values), error bars, or raw success-rate values per scenario and baseline. This information is load-bearing for verifying the empirical contribution.
- [Method] Grow-shrink search description: No details are provided on the explored scale range, the precise entropy metric or threshold used to declare a scale 'high-entropy', the search termination criteria, or whether these hyperparameters remain fixed across all eight scenarios. This directly affects the reproducibility and generalization of the scale-invariant claim.
- [Method] PCA integration in MAB-RRT: The paper does not specify how many principal components are retained, the exact mechanism by which these directions bias the sampling distribution, or any validation that the top eigenvectors align with feasible extraction trajectories rather than irrelevant variance (e.g., rotation about an axis). This is necessary to substantiate that the PCA step produces useful directions without per-scenario retuning.
minor comments (2)
- [Abstract] Abstract: The term 'mate vectors' is used without definition or citation; a brief explanation or reference would improve clarity for readers unfamiliar with the baseline.
- [Throughout] Notation and terminology: Ensure consistent capitalization and phrasing for 'scale-invariant sampling' and 'MAB-RRT' throughout the text and figures.
Simulated Author's Rebuttal
We appreciate the referee's comments, which highlight important aspects for improving the manuscript's clarity and rigor. Below we provide point-by-point responses to the major comments.
read point-by-point responses
-
Referee: [Experimental Results] Experimental Results section: The central claim of an order-of-magnitude success-rate improvement on 7 out of 8 scenarios is presented without reporting the number of independent trials, statistical significance tests (e.g., p-values), error bars, or raw success-rate values per scenario and baseline. This information is load-bearing for verifying the empirical contribution.
Authors: We agree that these details are necessary to fully support the empirical claims. We will revise the Experimental Results section to include the number of independent trials, error bars on the success rates, the raw success-rate values for each scenario and method, and results from statistical significance tests such as p-values from appropriate non-parametric tests. revision: yes
-
Referee: [Method] Grow-shrink search description: No details are provided on the explored scale range, the precise entropy metric or threshold used to declare a scale 'high-entropy', the search termination criteria, or whether these hyperparameters remain fixed across all eight scenarios. This directly affects the reproducibility and generalization of the scale-invariant claim.
Authors: We will augment the description of the grow-shrink search to include the explored scale range, the entropy metric and threshold for high-entropy scales, the search termination criteria, and note that these parameters were held constant across the eight scenarios. revision: yes
-
Referee: [Method] PCA integration in MAB-RRT: The paper does not specify how many principal components are retained, the exact mechanism by which these directions bias the sampling distribution, or any validation that the top eigenvectors align with feasible extraction trajectories rather than irrelevant variance (e.g., rotation about an axis). This is necessary to substantiate that the PCA step produces useful directions without per-scenario retuning.
Authors: We will clarify the PCA integration by specifying the number of principal components retained, detailing how the principal directions are used to bias the sampling distribution in the MAB-RRT, and providing evidence or discussion that these directions align with feasible extraction trajectories. revision: yes
Circularity Check
No circularity: empirical evaluation of algorithmic sampler against external baselines
full rationale
The paper describes an algorithmic pipeline (grow-shrink search for high-entropy scale followed by PCA for biased directions inside MAB-RRT) and reports success-rate improvements from direct experiments on eight scenarios versus independent baselines (uniform, obstacle-based, narrow-passage, mate-vector, physics-based, and BFS disassembly). No equations, predictions, or first-principles claims are presented that reduce by construction to fitted parameters, self-definitions, or self-citations internal to the work. The reported order-of-magnitude gains are measured outcomes, not tautological outputs of the method's own inputs.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Grow-shrink search will locate high-entropy sampling scales that improve exploration in narrow passages.
- domain assumption PCA on samples at the chosen scale yields directions useful for extraction motions.
Reference graph
Works this paper leans on
-
[1]
The International Journal of Advanced Manufacturing Tech- nology36(11), 1221–1233 (2008)
Aguinaga, I., Borro, D., Matey, L.: Parallel rrt-based path planning for selective disassembly planning. The International Journal of Advanced Manufacturing Tech- nology36(11), 1221–1233 (2008)
work page 2008
-
[2]
In: Agarwal, P.K., Kavraki, L.E., Ma- son, M.T
Amato, N.M., Bayazit, O.B., Dale, L.K., Jones, C., Vallejo, D.: OBPRM: An obstacle-based PRM for 3D workspaces. In: Agarwal, P.K., Kavraki, L.E., Ma- son, M.T. (eds.) Robotics: The Algorithmic Perspective, pp. 155–168. CRC Press (1998)
work page 1998
-
[3]
Journal of Manufacturing Systems77, 483–524 (2024)
Asif, M.E., Rastegarpanah, A., Stolkin, R.: Robotic disassembly for end-of-life products focusing on task and motion planning: A comprehensive survey. Journal of Manufacturing Systems77, 483–524 (2024)
work page 2024
-
[4]
Machine learning47(2), 235–256 (2002)
Auer, P., Cesa-Bianchi, N., Fischer, P.: Finite-time analysis of the multiarmed bandit problem. Machine learning47(2), 235–256 (2002)
work page 2002
- [5]
-
[6]
IEEE Robotics and Automation Letters8(8), 4529–4536 (2023)
Bayraktar, S.B., Orthey, A., Kingston, Z., Toussaint, M., Kavraki, L.E.: Solving rearrangement puzzles using path defragmentation in factored state spaces. IEEE Robotics and Automation Letters8(8), 4529–4536 (2023)
work page 2023
-
[7]
Bishop, C.M., Nasrabadi, N.M.: Pattern recognition and machine learning, vol. 4. Springer (2006)
work page 2006
-
[8]
In: IEEE International Conference on Robotics and Automation
Boor, V., Overmars, M.H., Van Der Stappen, A.F.: The gaussian sampling strategy for probabilistic roadmap planners. In: IEEE International Conference on Robotics and Automation. vol. 2, pp. 1018–1023 (1999)
work page 1999
-
[9]
Foundations and Trends in Machine Learning5(1), 1–122 (2012)
Bubeck, S., Cesa-Bianchi, N., et al.: Regret analysis of stochastic and nonstochastic multi-armed bandit problems. Foundations and Trends in Machine Learning5(1), 1–122 (2012)
work page 2012
-
[10]
In: Robotics: Science and Systems
Burns, B., Brock, O.: Toward optimal configuration space sampling. In: Robotics: Science and Systems. vol. 1, pp. 105–112 (2005)
work page 2005
-
[11]
Cai, P., Yue, X., Zhang, H.: Add-rrv for motion planning in complex environments. Robotica40(1), 136–153 (2022)
work page 2022
-
[12]
In: IEEE International Conference on Robotics and Automation
Chamzas, C., Kingston, Z., Quintero-Peña, C., Shrivastava, A., Kavraki, L.E.: Learning sampling distributions using local 3d workspace decompositions for mo- tion planning in high dimensions. In: IEEE International Conference on Robotics and Automation. pp. 1283–1289 (2021)
work page 2021
-
[13]
In: Algorithmic Foundation of Robotics VIII
Dalibard, S., Laumond, J.P.: Control of probabilistic diffusion in motion planning. In: Algorithmic Foundation of Robotics VIII. pp. 467–481. Springer (2009)
work page 2009
-
[14]
The International Journal of Robotics Research30(12), 1461–1476 (2011)
Dalibard, S., Laumond, J.P.: Linear dimensionality reduction in random mo- tion planning. The International Journal of Robotics Research30(12), 1461–1476 (2011)
work page 2011
-
[15]
Das, A.R., Koskinopoulou, M.: Towards sustainable manufacturing: A review on innovations in robotic assembly and disassembly. IEEE Access (2025)
work page 2025
-
[16]
Dorussen, R.: Learning how to solve the buzz-wire game with a robot arm. Ph.D. thesis, Msc Thesis Report, Eindhoven University of Technology (2021)
work page 2021
-
[17]
In: IEEE International Conference on Robotics and Automation
Ebinger, T., Kaden, S., Thomas, S., Andre, R., Amato, N., Thomas, U.: A general and flexible search framework for disassembly planning. In: IEEE International Conference on Robotics and Automation. pp. 3548–3555 (Sep 2018)
work page 2018
-
[18]
In: IEEE International Conference on Intelligent Robots and Systems
Eppner,C., Brock, O.:Visual detection of opportunitiesto exploit contact ingrasp- ing using contextual multi-armed bandits. In: IEEE International Conference on Intelligent Robots and Systems. pp. 273–278 (2017) 18 Bayraktar et al
work page 2017
-
[19]
IEEE Robotics and Au- tomation Letters8(10), 6651–6658 (2023)
Faroni, M., Berenson, D.: Motion planning as online learning: A multi-armed ban- dit approach to kinodynamic sampling-based planning. IEEE Robotics and Au- tomation Letters8(10), 6651–6658 (2023)
work page 2023
-
[20]
In: IEEE International Conference on Robotics and Au- tomation (ICRA)
Faroni, M., Berenson, D.: Online adaptation of sampling-based motion planning with inaccurate models. In: IEEE International Conference on Robotics and Au- tomation (ICRA). pp. 2382–2388. IEEE (2024)
work page 2024
-
[21]
In: IEEE International Conference on Intelligent Robots and Systems
Gammell, J.D., Srinivasa, S.S., Barfoot, T.D.: Informed rrt*: Optimal sampling- based path planning focused via direct sampling of an admissible ellipsoidal heuris- tic. In: IEEE International Conference on Intelligent Robots and Systems. pp. 2997–3004 (2014)
work page 2014
-
[22]
International Conference on Algorithmic Learning Theory (May 2008)
Garivier, A., Moulines, É.: On upper-confidence bound policies for non-stationary bandit problems. International Conference on Algorithmic Learning Theory (May 2008)
work page 2008
-
[23]
https://libeigen.gitlab.io (2010)
Guennebaud, G., Jacob, B., et al.: Eigen. https://libeigen.gitlab.io (2010)
work page 2010
-
[24]
In: IEEE International Conference on Robotics and Automation
Hsu, D., Jiang, T., Reif, J., Sun, Z.: The bridge test for sampling narrow pas- sages with probabilistic roadmap planners. In: IEEE International Conference on Robotics and Automation. vol. 3, pp. 4420–4426 (2003)
work page 2003
-
[25]
IEEE Transactions on Automa- tion Science and Engineering (2025)
Huang, L., Meng, L., Jing, X., Wang, J.: Selective densification for rapid motion planning in high dimensions with narrow passages. IEEE Transactions on Automa- tion Science and Engineering (2025)
work page 2025
-
[26]
In: IEEE International Conference on Robotics and Automation
Ichter, B., Harrison, J., Pavone, M.: Learning sampling distributions for robot motion planning. In: IEEE International Conference on Robotics and Automation. pp. 7087–7094. IEEE (2018)
work page 2018
-
[27]
Cambridge university press (2003)
Jaynes, E.T.: Probability theory: The logic of science. Cambridge university press (2003)
work page 2003
-
[28]
In: International encyclopedia of statis- tical science, pp
Jolliffe, I.: Principal component analysis. In: International encyclopedia of statis- tical science, pp. 1094–1096. Springer (2011)
work page 2011
-
[29]
The international journal of robotics research30(7), 846–894 (2011)
Karaman, S., Frazzoli, E.: Sampling-based algorithms for optimal motion planning. The international journal of robotics research30(7), 846–894 (2011)
work page 2011
-
[30]
In: IEEE Interna- tional Conference on Intelligent Robots and Systems (IROS)
Koval, M.C., King, J.E., Pollard, N.S., Srinivasa, S.S.: Robust trajectory selection for rearrangement planning as a multi-armed bandit problem. In: IEEE Interna- tional Conference on Intelligent Robots and Systems (IROS). pp. 2678–2685 (2015)
work page 2015
-
[31]
In: IEEE International Conference on Robotics and Automation
Kuffner, J.J., LaValle, S.M.: RRT-connect: An efficient approach to single-query path planning. In: IEEE International Conference on Robotics and Automation. vol. 2, pp. 995–1001 (2000)
work page 2000
-
[32]
IEEE Robotics and Au- tomation Letters7(1), 323–330 (2022)
Lai, T., Ramos, F.: Rapidly-exploring random forest: Adaptively exploits local structure with generalised multi-trees motion planning. IEEE Robotics and Au- tomation Letters7(1), 323–330 (2022)
work page 2022
-
[33]
Laili, Y., Wang, Y., Fang, Y., Pham, D.T.: Optimisation of robotic disassembly for remanufacturing. Springer (2022)
work page 2022
-
[34]
Cambridge university press (2006)
LaValle, S.M.: Planning algorithms. Cambridge university press (2006)
work page 2006
-
[35]
In: IEEE International Conference on Robotics and Automation
Lee, J., Kwon, O., Zhang, L., Yoon, S.e.: Sr-rrt: Selective retraction-based rrt plan- ner. In: IEEE International Conference on Robotics and Automation. pp. 2543– 2550 (2012)
work page 2012
-
[36]
IEEE Transactions on Automation Science and Engineering17(3), 1455– 1468 (2020)
Li, R., Pham, D.T., Huang, J., Tan, Y., Qu, M., Wang, Y., Kerin, M., Jiang, K., Su, S., Ji, C., et al.: Unfastening of hexagonal headed screws by a collaborative robot. IEEE Transactions on Automation Science and Engineering17(3), 1455– 1468 (2020)
work page 2020
-
[37]
In: IEEE International Conference on Robotics and Automation
Li, Y., Bekris, K.E.: Balancing state-space coverage in planning with dynamics. In: IEEE International Conference on Robotics and Automation. pp. 3246–3253 (2010) Scale-Invariant Sampling 19
work page 2010
-
[38]
IEEE Robotics & Au- tomation Magazine22(3), 96–102 (September 2015)
Moll, M., Şucan, I.A., Kavraki, L.E.: Benchmarking motion planning algorithms: An extensible infrastructure for analysis and visualization. IEEE Robotics & Au- tomation Magazine22(3), 96–102 (September 2015)
work page 2015
-
[39]
IEEE Access 11, 45129–45139 (2023)
Motoda, T., Petit, D., Nishi, T., Nagata, K., Wan, W., Harada, K.: Multi-step object extraction planning from clutter based on support relations. IEEE Access 11, 45129–45139 (2023)
work page 2023
-
[40]
Society for Industrial and Applied Mathematics, Philadelphia (1992)
Niederreiter, H.: Random Number Generation and Quasi-Monte-Carlo Methods. Society for Industrial and Applied Mathematics, Philadelphia (1992)
work page 1992
-
[41]
Annual Review of Control, Robotics, and Autonomous Systems 7(1), 285–310 (2024)
Orthey, A., Chamzas, C., Kavraki, L.E.: Sampling-based motion planning: A com- parative review. Annual Review of Control, Robotics, and Autonomous Systems 7(1), 285–310 (2024)
work page 2024
-
[42]
Hand- book of industrial robotics2, 1023–1036 (1998)
Parker, L.E., Draper, J.V.: Robotics applications in maintenance and repair. Hand- book of industrial robotics2, 1023–1036 (1998)
work page 1998
-
[43]
arXiv preprint arXiv:2503.22427 (2025)
Pathak, A., Muthusamy, R.: Collapse and collision aware grasping for cluttered shelf picking. arXiv preprint arXiv:2503.22427 (2025)
-
[44]
on lines and planes of closest fit to systems of points in space
Pearson, K.: Liii. on lines and planes of closest fit to systems of points in space. The London, Edinburgh, and Dublin philosophical magazine and journal of science 2(11), 559–572 (1901)
work page 1901
-
[45]
Rickert, M., Sieverling, A., Brock, O.: Balancing exploration and exploitation in sampling-basedmotionplanning.IEEETransactionsonRobotics30(6),1305–1317 (2014)
work page 2014
-
[46]
Autonomous Robots35(1), 27–36 (2013)
Rosell, J., Suárez, R., Pérez, A.: Path planning for grasping operations using an adaptive pca-based sampling method. Autonomous Robots35(1), 27–36 (2013)
work page 2013
-
[47]
The International Journal of Advanced Manufacturing Technology 124(9), 3171–3183 (2023)
Serrano-Munoz, A., Arana-Arexolaleiba, N., Chrysostomou, D., Bøgh, S.: Learning and generalising object extraction skill for contact-rich disassembly tasks: an intro- ductory study. The International Journal of Advanced Manufacturing Technology 124(9), 3171–3183 (2023)
work page 2023
-
[48]
Foundations and Trends in Machine Learning12(1-2), 1–286 (2019)
Slivkins, A., et al.: Introduction to multi-armed bandits. Foundations and Trends in Machine Learning12(1-2), 1–286 (2019)
work page 2019
-
[49]
IEEE Robotics & Automation Magazine19(4), 72–82 (December 2012)
Şucan, I.A., Moll, M., Kavraki, L.E.: The Open Motion Planning Library. IEEE Robotics & Automation Magazine19(4), 72–82 (December 2012)
work page 2012
-
[50]
Journal of Computational Biology10(3-4), 617– 634 (2003)
Teodoro, M.L., Phillips Jr, G.N., Kavraki, L.E.: Understanding protein flexibility through dimensionality reduction. Journal of Computational Biology10(3-4), 617– 634 (2003)
work page 2003
-
[51]
In: Conference on Robot Learning (2025)
Tian, Y., Jacob, J., Huang, Y., Zhao, J., Gu, E.L., Ma, P., Zhang, A., Javid, F., Romero, B., Chitta, S., Sueda, S., Li, H., Matusik, W.: Fabrica: Dual-arm assembly of general multi-part objects via integrated planning and learning. In: Conference on Robot Learning (2025)
work page 2025
- [52]
-
[53]
In: IEEE International Conference on Intelligent Robots and Systems
Yershova, A., Jaillet, L., Siméon, T., LaValle, S.M.: Dynamic-domain rrts: Efficient exploration by controlling the sampling domain. In: IEEE International Conference on Intelligent Robots and Systems. pp. 3856–3861 (2005)
work page 2005
-
[54]
Journal of Manufacturing Science and Engineering145(3), 031008 (2023)
Zhang, X., Eltouny, K., Liang, X., Behdad, S.: Automatic screw detection and tool recommendation system for robotic disassembly. Journal of Manufacturing Science and Engineering145(3), 031008 (2023)
work page 2023
-
[55]
Zickler, S., Veloso, M.M.: Efficient physics-based planning: sampling search via non-deterministic tactics and skills. In: AAMAS (1). pp. 27–33 (2009)
work page 2009
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.