Persona-Based Process Design for Assistive Human-Robot Workplaces for Persons with Disabilities
Pith reviewed 2026-05-07 11:06 UTC · model grok-4.3
The pith
Abstracting disabilities into personas lets human-robot workplaces generate adaptive assistance strategies that follow universal design.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
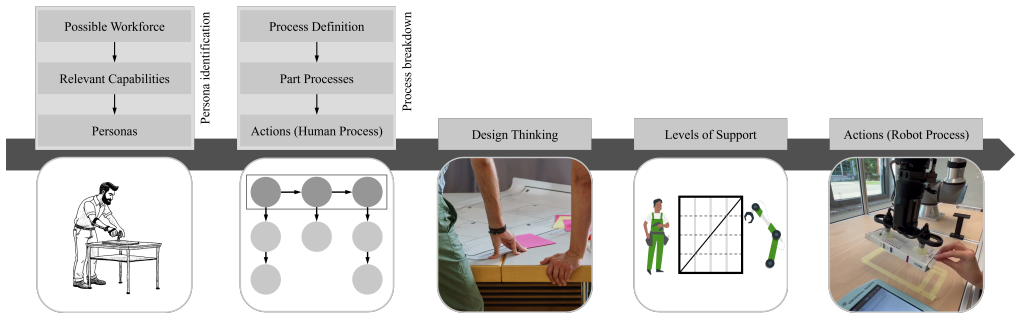
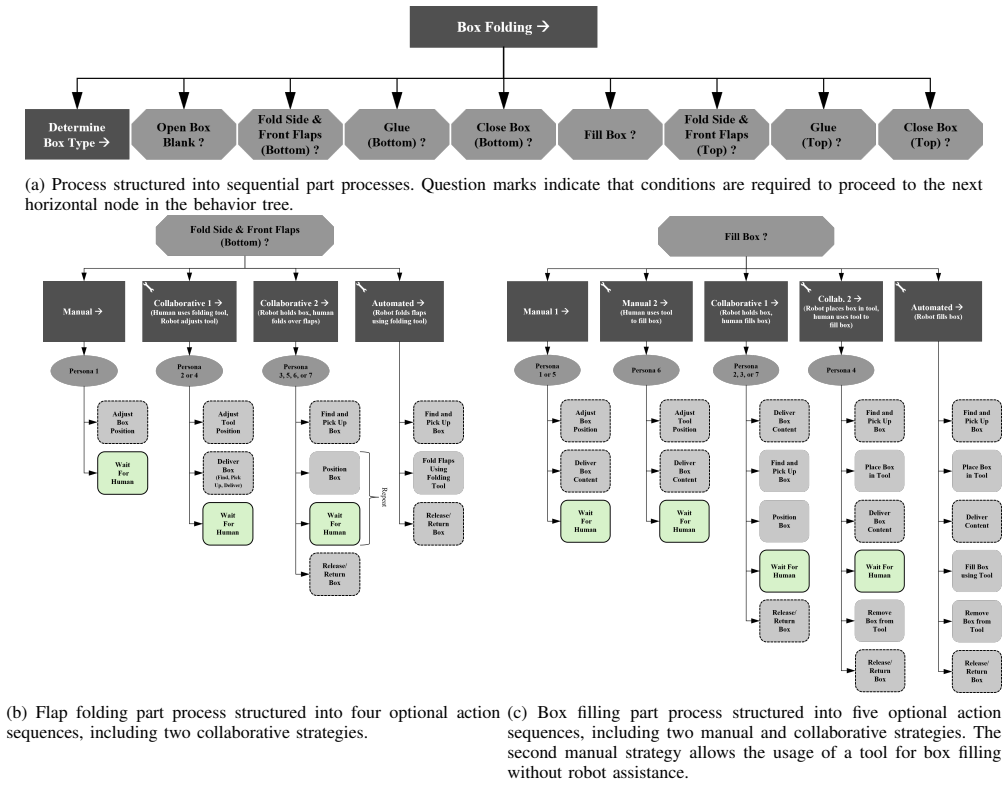
By abstracting common impairments into personas, dividing the work process into sequential actions, developing strategies for each action and persona pair through design thinking, ordering the strategies by degree of robot involvement, and encoding them in a behavior tree, the macro-behavior of the workplace can adapt online to the current persona, thereby producing more comprehensive process strategies while realizing universal design for persons with disabilities.
What carries the argument
The persona-based process design workflow, which turns impairments into personas, creates per-action strategies with design thinking, and arranges them by robot assistance level inside a behavior tree for online adaptation.
If this is right
- The method generates more comprehensive process strategies than would be obtained for a single user.
- The behavior tree allows the workplace to switch assistance levels online when the persona changes.
- Universal design is achieved without requiring expert knowledge for every individual worker.
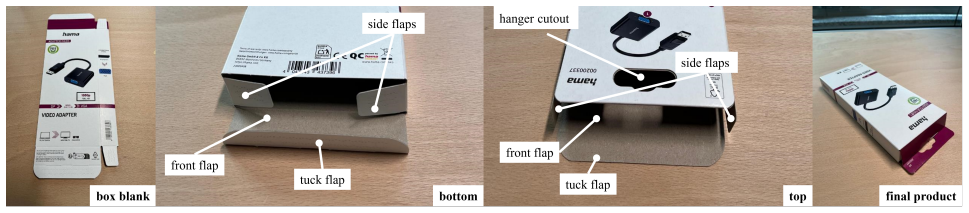
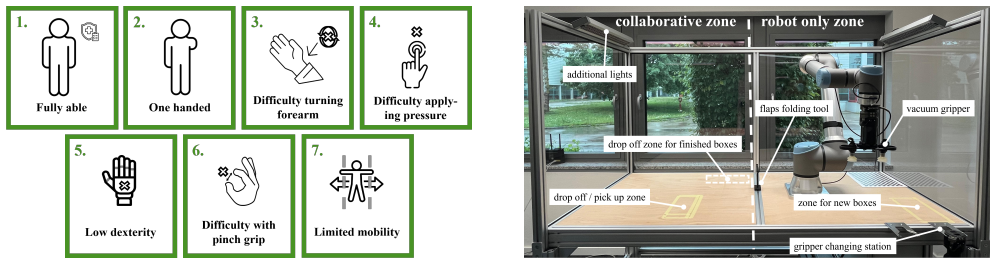
- The approach was tested on a collaborative box-folding process using seven personas with different disabilities.
Where Pith is reading between the lines
- One set of strategies could serve a broader group of users than traditional individualized designs, lowering the cost of deployment across workplaces.
- The behavior-tree structure may simplify adding new actions or personas later without rebuilding the entire plan.
- The same persona abstraction step could be tested on other manual tasks such as sorting or light assembly to check how far the method generalizes.
Load-bearing premise
Strategies developed for abstracted personas will produce safe, effective, and generalizable assistance when used by real individuals in physical collaborative tasks.
What would settle it
A direct comparison in which real persons with disabilities perform the box-folding task under the persona-derived strategies versus under individually tailored strategies, recording task success rate, safety events, and user-reported effort.
Figures


read the original abstract
Human-robot interaction is emerging as an important paradigm for integrating persons with disabilities into the workplace. While these systems can enable individuals to work, their design is mostly personalized, hindering widespread use beyond the individual user. The universal design paradigm is a central pillar of inclusive design, describing usability of systems by all. To incorporate universal design into process design for human-robot workplaces expert knowledge is required that is often not available. To simplify process design of human-robot workplaces, we propose a persona-based design approach. First, typical impairments prevalent in the workforce or particularly relevant for the processes are abstracted into personas with disabilities. The work process is subdivided into sequential actions. For each action and persona, strategies are developed to reach the action goal by a design thinking approach. The resulting actions are ordered by level of robot assistance, i.e. robot involvement, and implemented in a behavior tree. Therefore, the macro-behavior of the workplace may adapt to individual personas online. We demonstrate the method in a collaborative box folding process with a total of seven personas with disabilities. The persona-based process design shows promising results by generating more comprehensive process strategies while enabling adaptive behavior in the sense of universal design.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a persona-based process design method for assistive human-robot workplaces targeting persons with disabilities. Impairments are abstracted into personas; work processes are subdivided into sequential actions; design thinking is used to generate strategies for each action-persona pair; these are ordered by robot assistance level and encoded in a behavior tree to support online adaptation to individual personas. The approach is demonstrated on a collaborative box-folding task using seven personas, with the claim that it yields more comprehensive process strategies and enables adaptive behavior aligned with universal design.
Significance. If validated, the method could provide a reusable framework for embedding universal design principles into HRI process planning without requiring per-user expert customization, potentially increasing the scalability of assistive robots in inclusive workplaces. The integration of behavior trees for runtime adaptation is a technically sound choice that matches the goal of persona switching.
major comments (3)
- Abstract and demonstration: the claim that the persona-based design 'shows promising results by generating more comprehensive process strategies' is unsupported by any quantitative metrics, baseline comparisons, completeness scores, or error analysis for the box-folding task.
- Method and evaluation sections: the central claim that strategies developed via design thinking on abstracted personas will produce safe, effective assistance rests on an untested assumption; the manuscript reports no real-user validation, no physical robot experiments, and no safety checks (force/torque limits, collision avoidance under impairment variability).
- Behavior-tree adaptation: the architectural description of online persona adaptation is given, but no robustness evaluation is provided against sensor noise, timing jitter, partial persona mismatches, or real-time capability estimation.
minor comments (2)
- Clarify the procedure used to order actions by 'level of robot assistance' (subjective or quantitative criteria) so that the ordering step can be reproduced.
- Add a limitations paragraph discussing the gap between persona abstractions and real individual variability.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive feedback. Our manuscript presents a methodological contribution for persona-based process design in assistive HRI, illustrated via a case study. We address each major comment below by clarifying the scope of the work and proposing targeted revisions to the text.
read point-by-point responses
-
Referee: Abstract and demonstration: the claim that the persona-based design 'shows promising results by generating more comprehensive process strategies' is unsupported by any quantitative metrics, baseline comparisons, completeness scores, or error analysis for the box-folding task.
Authors: We agree that the demonstration relies on qualitative comparison of the generated strategies rather than quantitative metrics. The claim of 'more comprehensive process strategies' is based on the enumeration of persona-specific adaptations for each action in the box-folding task, which exceeds a non-persona baseline in coverage of impairment considerations. In revision, we will qualify or remove the 'promising results' phrasing in the abstract, replace it with a description of the qualitative demonstration, and add a subsection in the discussion that explicitly characterizes the evaluation as qualitative while outlining directions for future quantitative metrics such as strategy completeness scores. revision: yes
-
Referee: Method and evaluation sections: the central claim that strategies developed via design thinking on abstracted personas will produce safe, effective assistance rests on an untested assumption; the manuscript reports no real-user validation, no physical robot experiments, and no safety checks (force/torque limits, collision avoidance under impairment variability).
Authors: The manuscript focuses on the design method and its application in a simulated case study; no physical robot experiments, real-user validation, or safety analyses were performed. We will revise the method and evaluation sections to state these limitations explicitly, including the untested nature of the safety and effectiveness assumptions. A new limitations and future work subsection will be added to discuss the requirement for subsequent real-user studies, physical robot trials, and incorporation of safety constraints such as force/torque limits and collision avoidance under variable impairments. revision: partial
-
Referee: Behavior-tree adaptation: the architectural description of online persona adaptation is given, but no robustness evaluation is provided against sensor noise, timing jitter, partial persona mismatches, or real-time capability estimation.
Authors: The behavior-tree section provides an architectural description to realize the online adaptation goal of the method. No empirical robustness tests against sensor noise, timing jitter, or partial mismatches were conducted. We will expand the relevant section to discuss how the ordered assistance levels and persona switching mechanism may offer inherent resilience to certain variations, while clearly indicating that dedicated robustness evaluations and real-time capability estimation remain topics for future work. revision: yes
Circularity Check
No circularity; procedural design method with no self-referential reductions
full rationale
The paper presents a methodological proposal: abstract impairments to personas, subdivide the work process into actions, generate strategies per action/persona via design thinking, order by robot assistance level, and encode in a behavior tree for adaptation. The demonstration applies this sequence to a box-folding task with seven personas but contains no equations, fitted parameters, predictions derived from data, or self-citations whose content is required to justify the central claims. The 'more comprehensive strategies' and 'adaptive behavior' outcomes follow directly from executing the proposed steps rather than reducing to any prior result by construction. The derivation chain is therefore self-contained as an engineering design procedure.
Axiom & Free-Parameter Ledger
axioms (2)
- ad hoc to paper Design thinking produces effective and comprehensive assistance strategies for each action-persona combination.
- domain assumption Behavior trees can implement online macro-behavior adaptation to different personas.
invented entities (1)
-
Personas with disabilities
no independent evidence
Reference graph
Works this paper leans on
-
[1]
Accessible environments – toward universal design,
R. L. Mace, G. J. Hardie, and J. P. Place, “Accessible environments – toward universal design,” inDesign Intervention – Toward a More Humane Architecture, W. F. E. Preiser, J. C. Vischer, and E. T. White, Eds. Taylor & Francis Ltd. Oxfordshire, UK, 1991
work page 1991
-
[2]
Union of equality: Strategy for the rights of persons with disabilities 2021-2030,
European Commission, “Union of equality: Strategy for the rights of persons with disabilities 2021-2030,” 2021. [Online]. Available: https://eur-lex.europa.eu/legal-content/EN/TXT/ ?uri=COM%3A2021%3A101%3AFIN#PP4Contents
work page 2021
-
[3]
Creating personas with disabili- ties,
T. Schulz and K. Skeide Fuglerud, “Creating personas with disabili- ties,” inComputers Helping People with Special Needs, K. Miesen- berger, A. Karshmer, P. Penaz, and W. Zagler, Eds. Berlin, Heidel- berg: Springer Berlin Heidelberg, 2012
work page 2012
-
[4]
Depictions of diverse people in work scenarios with assistive robots,
N. Mandischer and S. Klein, “Depictions of diverse people in work scenarios with assistive robots,” 2025. [Online]. Available: https://doi.org/10.5281/zenodo.17788504
-
[5]
C. Weidemann, E. H ¨using, Y . Freischlad, N. Mandischer, B. Corves, and M. H ¨using, “Ramb: Validation of a software tool for determining robotic assistance for people with disabilities in first labor market manufacturing applications,” in2022 IEEE International Conference on Systems, Man, and Cybernetics (SMC). Prague, Czech Republic: IEEE, 2022
work page 2022
-
[6]
Acceptance of industrial collaborative robots by people with disabilities in shel- tered workshops,
S. Drolshagen, M. Pfingsthorn, P. Gliesche, and A. Hein, “Acceptance of industrial collaborative robots by people with disabilities in shel- tered workshops,”Frontiers in Robotics and AI, vol. 7, 2020
work page 2020
-
[7]
S. A. Arboleda, M. Pascher, Y . Lakhnati, and J. Gerken, “Understand- ing human-robot collaboration for people with mobility impairments at the workplace, a thematic analysis,” in29th IEEE International Conference on Robot and Human Interactive Communication (RO- MAN). IEEE, 2020
work page 2020
-
[8]
J. Kildal, M. Mart ´ın, I. Ipi ˜na, and I. n. Maurtua, “Empowering assembly workers with cognitive disabilities by working with collab- orative robots: a study to capture design requirements,” in52nd CIRP Conference on Manufacturing Systems (CMS). Elsevier, 2019
work page 2019
-
[9]
A supportive friend at work: Robotic workplace assistance for the disabled,
A. Graseret al., “A supportive friend at work: Robotic workplace assistance for the disabled,”IEEE Robotics & Automation Magazine, vol. 20, no. 4, 2013
work page 2013
-
[10]
Robbie the cobot helps disabled people and those with reduced mobility tackle ford assembly work,
M. Wagener, “Robbie the cobot helps disabled people and those with reduced mobility tackle ford assembly work,” 2022. [Online]. Available: https://media.ford.com/content/fordmedia/feu/en/news/2022/05/25/ robbie-the-cobot-helps-disabled-people-and-those-with-reduced-mo. html
work page 2022
-
[11]
Development of assistive mobile robots helping the disabled work in a factory environment,
J. W. Kang, B. S. Kim, and M. J. Chung, “Development of assistive mobile robots helping the disabled work in a factory environment,” in2008 IEEE/ASME International Conference on Mechtronic and Embedded Systems and Applications, 2008
work page 2008
-
[12]
Determining robotic assistance for inclusive workplaces for people with disabilities,
E. H ¨using, C. Weidemann, M. Lorenz, B. Corves, and M. H ¨using, “Determining robotic assistance for inclusive workplaces for people with disabilities,”Robotics, vol. 10, no. 1, 2021
work page 2021
-
[13]
Design process for concept development of human-robot workstations for people with disabilities,
E. H ¨using, C. Weidemann, B. Corves, and M. H¨using, “Design process for concept development of human-robot workstations for people with disabilities,” inIEEE International Conference on Systems, Man, and Cybernetics (SMC). IEEE, 2024
work page 2024
-
[14]
Inclusion through robotics: Designing human-robot collaboration for handi- capped workers,
D. Kremer, S. Hermann, C. Henkel, and M. Schneider, “Inclusion through robotics: Designing human-robot collaboration for handi- capped workers,”Advances in Transdisciplinary Engineering, vol. 7, 2018
work page 2018
-
[15]
Entwicklergemeinschaft IMBA, “Imba - handbuch: 4th edition,” 2019
work page 2019
-
[16]
A. Lottermoser, G. Y ¨ucel, and J. Berger, “Method for the selection of an intuitive robotic assistant to support physically challenged employees,” in17th CIRP Conference on Intelligent Computation in Manufacturing Engineering (CIRP ICME ‘23). Elsevier, 2023
work page 2023
-
[17]
M. St ¨ohr, M. Schneider, and C. Henkel, “Adaptive work instructions for people with disabilities in the context of human robot collabora- tion,” inIEEE 16th International Conference on Industrial Informatics (INDIN). IEEE, 2018
work page 2018
-
[18]
Cooper,The Inmates are Running the Asylum
A. Cooper,The Inmates are Running the Asylum. Wiesbaden: Vieweg+Teubner Verlag, 1999
work page 1999
-
[19]
Three tensions between personas and complex disability identities,
E. J. Edwards, C. M. Sum, and S. M. Branham, “Three tensions between personas and complex disability identities,” inExtended Abstracts of the 2020 CHI Conference on Human Factors in Computing Systems, ser. CHI EA ’20. New York, NY , USA: Association for Computing Machinery, 2020. [Online]. Available: https://doi.org/10.1145/3334480.3382931
-
[20]
Behavioral persona for human-robot interaction: A study based on pet robot,
T. F. dos Santos, D. G. de Castro, A. A. Masiero, and P. T. Aquino Junior, “Behavioral persona for human-robot interaction: A study based on pet robot,” inHuman-Computer Interaction. Advanced Interaction Modalities and Techniques, M. Kurosu, Ed. Cham: Springer International Publishing, 2014
work page 2014
-
[21]
I. Duque, K. Dautenhahn, K. L. Koay, l. Willcock, and B. Christianson, “A different approach of using personas in human-robot interaction: Integrating personas as computational models to modify robot com- panions’ behaviour,” in2013 IEEE RO-MAN, 2013
work page 2013
-
[22]
Z. Maternaet al., “Using persona, scenario, and use case to develop a human-robot augmented reality collaborative workspace,” in Proceedings of the Companion of the 2017 ACM/IEEE International (a) Process structured into sequential part processes. Question marks indicate that conditions are required to proceed to the next horizontal node in the behavior t...
-
[23]
T. Finsterbusch, A. Petz, M. Faber, J. H ¨artel, P. Kuhlang, and C. M. Schlick, “A comparative empirical evaluation of the accuracy of the novel process language mtm-human work design,” inAdvances in Ergonomics of Manufacturing: Managing the Enterprise of the Future, C. Schlick and S. Trzcieli ´nski, Eds. Cham: Springer International Publishing, 2016
work page 2016
-
[24]
D. B ¨uhne, T. Alles, C. Hetzel, M. Steibelt, I. Frob ¨ose, and M. Bethge, “Predictive validity of a customized functional capacity evaluation in patients with musculoskeletal disorders,”International Archives of Occupational and Environmental Health, vol. 93, no. 5, 2020
work page 2020
-
[25]
Matching input and output devices and physical disabilities for human-robot workstations,
C. Weidemann, N. Mandischer, and B. Corves, “Matching input and output devices and physical disabilities for human-robot workstations,” in2024 IEEE International Conference on Systems, Man, and Cyber- netics (SMC), 2024
work page 2024
- [26]
-
[27]
What is design thinking & why is it beneficial?
IDEO U, “What is design thinking & why is it beneficial?”
-
[28]
Available: https://www.ideou.com/blogs/inspiration/ what-is-design-thinking
[Online]. Available: https://www.ideou.com/blogs/inspiration/ what-is-design-thinking
-
[29]
Children’s imaginar- ies of human-robot interaction in healthcare,
N. Vall `es-Peris, C. Angulo, and M. Dom ´enech, “Children’s imaginar- ies of human-robot interaction in healthcare,”International journal of environmental research and public healthh, vol. 15, no. 5, 2020
work page 2020
-
[30]
H. Webb, M. Dumitru, A. van Maris, K. Winkle, M. Jirotka, and A. Winfield, “Role-play as responsible robotics: The virtual witness testimony role-play interview for investigating hazardous human-robot interactions,”Frontiers in Robotics and AI, vol. 8, 2021. [Online]. Available: https://www.frontiersin.org/journals/ robotics-and-ai/articles/10.3389/frobt....
-
[31]
F. Flemisch, M. Heesen, T. Hesse, J. Kelsch, A. Schieben, and J. Beller, “Towards a dynamic balance between humans and au- tomation: authority, ability, responsibility and control in shared and cooperative control situations,”Cogn Tech Work, vol. 14, 2012
work page 2012
-
[32]
M. Colledanchise and P. ¨Ogren,Behavior Trees in Robotics and AI – An Introduction. CRC Press, 2018
work page 2018
- [33]
-
[34]
Feedback from the experience of incorporating chatgpt into student design thinking activities,
T.-L. Chen, C.-Y . Hou, and R. Zhu, “Feedback from the experience of incorporating chatgpt into student design thinking activities,” in2024 6th International Conference on Control and Robotics (ICCR), 2024
work page 2024
-
[35]
Llms in design thinking: Autoethnographic insights and design implications,
A. R. Asadi, “Llms in design thinking: Autoethnographic insights and design implications,” inProceedings of the 2023 5th World Symposium on Software Engineering, ser. WSSE ’23. New York, NY , USA: Association for Computing Machinery, 2023
work page 2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.