Recognition: 2 theorem links
· Lean TheoremTriP: A Triangle Puzzle Approach to Robust Translation Averaging
Pith reviewed 2026-05-11 01:21 UTC · model grok-4.3
The pith
TriP recovers camera locations from noisy pairwise translation directions by inferring local scales from triangles and synchronizing them in the log domain.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
TriP infers local relative edge scales from triangle geometry and then synchronizes the scales of overlapping triangles in the logarithmic domain to recover globally consistent edge lengths and camera locations. By leveraging higher-order consistency across triangles, the method is robust to adversarial, cycle-consistent, and other structured corruptions. Log-scale synchronization excludes the degenerate zero-scale solution by construction, so no extra anti-collapse constraints are required. These structural properties also support a particularly strong theory for exact location recovery under suitable conditions.
What carries the argument
Triangle-based inference of local relative scales followed by logarithmic-domain synchronization across overlapping triangles.
If this is right
- Robustness holds against adversarial and cycle-consistent corruptions in the direction measurements.
- The zero-scale collapse is prevented without any auxiliary constraints.
- Strong theoretical guarantees exist for exact recovery of camera locations.
- The algorithm is fully parallelizable and scales to graphs with millions of cameras.
- Empirical accuracy exceeds all previous translation averaging techniques on both synthetic and real data.
Where Pith is reading between the lines
- The same triangle-consistency idea could be adapted to other graph synchronization problems such as rotation averaging.
- Hybrid pipelines that combine TriP with learned initial scales might further improve performance on extremely noisy inputs.
- The exact-recovery theory suggests new benchmarks that stress-test methods on graphs with controlled triangle density.
- Integrating TriP into existing structure-from-motion systems could reduce dependence on separate robust estimators for outlier rejection.
Load-bearing premise
The input graph contains enough overlapping triangles for local scale inference to remain reliable and for consistent scales to propagate globally even when some triangles are corrupted.
What would settle it
A graph that is too sparse to contain reliable overlapping triangles, or a corruption pattern that systematically violates triangle consistency, would produce inaccurate or collapsed camera locations.
Figures






read the original abstract
Translation averaging aims to recover camera locations from pairwise relative translation directions and is a fundamental component of global Structure-from-Motion pipelines. The problem is challenging because direction measurements contain no distance information, making the estimation problem highly ill-conditioned and highly sensitive to corrupted observations. In this paper, we propose TriP, a triangle-based framework for robust translation averaging. TriP first infers local relative edge scales from triangle geometry, and then synchronizes the scales of overlapping triangles in the logarithmic domain to recover globally consistent edge lengths and camera locations. By leveraging higher-order consistency across triangles, the proposed method is robust to adversarial, cycle-consistent, and other structured corruptions. In addition, TriP avoids the collapse issue without requiring any extra anti-collapse constraints, since log-scale synchronization excludes the degenerate zero-scale solution by construction. These structural advantages enable a particularly strong theory for exact location recovery. On the practical side, TriP is fully parallelizable, computationally efficient, and naturally scalable to graphs with millions of cameras. Moreover, it outperforms all previous translation averaging methods by a large margin on both synthetic and real datasets.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes TriP, a triangle-based framework for robust translation averaging. It infers local relative edge scales from triangle geometry and synchronizes scales of overlapping triangles in the logarithmic domain to recover globally consistent edge lengths and camera locations. The method claims robustness to adversarial, cycle-consistent, and structured corruptions via higher-order triangle consistency, avoids zero-scale collapse without extra constraints since log-scale synchronization excludes the degenerate solution by construction, provides a strong theory for exact location recovery, is fully parallelizable and scalable to millions of cameras, and outperforms prior translation averaging methods by a large margin on synthetic and real datasets.
Significance. If the theoretical guarantees for exact recovery and the reported empirical gains hold, TriP would constitute a notable advance for global Structure-from-Motion pipelines by delivering built-in robustness to structured outliers and scalability without auxiliary anti-collapse terms. The structural use of triangle consistency and log-domain synchronization are explicit strengths that could improve reliability in ill-conditioned translation estimation.
minor comments (2)
- The abstract is dense; splitting the description of the method, theoretical advantages, and experimental claims into separate sentences would improve readability.
- A brief statement of the precise graph-connectivity or triangle-overlap conditions required for the exact-recovery theory would help readers assess the scope of the guarantees.
Simulated Author's Rebuttal
We thank the referee for the positive assessment of TriP, the recognition of its theoretical guarantees for exact recovery, robustness via triangle consistency, and scalability advantages, as well as the recommendation for minor revision.
Circularity Check
No significant circularity detected
full rationale
The derivation proceeds by inferring local relative edge scales directly from triangle geometry on the input graph, followed by log-domain synchronization to obtain globally consistent scales and camera locations. The exclusion of the zero-scale collapse is a direct algebraic consequence of working in the logarithmic domain rather than a fitted or redefined quantity. No load-bearing step reduces to a self-citation, a renamed empirical pattern, or a parameter fitted to the target output; the exact-recovery theory and robustness claims rest on the higher-order consistency property of triangles, which is independent of the final recovered locations. The method is therefore self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption The camera graph contains sufficient overlapping triangles to support local relative edge scale inference from geometry.
- domain assumption Log-domain synchronization of triangle scales produces globally consistent edge lengths without introducing or requiring additional degeneracy-prevention terms.
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
TriP first infers local relative edge scales from triangle geometry, and then synchronizes the scales of overlapping triangles in the logarithmic domain to recover globally consistent edge lengths... log-scale synchronization excludes the degenerate zero-scale solution by construction.
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
We establish deterministic exact-recovery guarantees for TriP under arbitrary generic locations and arbitrary adversarial corruptions... first translation averaging theory that tolerates a nonvanishing level of adversarial corruption as n→∞.
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Global motion estimation from point matches
Mica Arie-Nachimson, Shahar Z Kovalsky, Ira Kemelmacher-Shlizerman, Amit Singer, and Ronen Basri. Global motion estimation from point matches. In2012 Second international conference on 3D imaging, modeling, processing, visualization & transmission, pages 81–88. IEEE, 2012
work page 2012
-
[2]
A ransac-based approach to model fitting and its application to finding cylinders in range data
Robert C Bolles and Martin A Fischler. A ransac-based approach to model fitting and its application to finding cylinders in range data. InIjcai, volume 1981, pages 637–643, 1981
work page 1981
-
[3]
Efficient and robust large-scale rotation averaging
Avishek Chatterjee and Venu Madhav Govindu. Efficient and robust large-scale rotation averaging. InProceedings of the IEEE international conference on computer vision, pages 521–528, 2013. 11
work page 2013
-
[4]
Avishek Chatterjee and Venu Madhav Govindu. Robust relative rotation averaging.IEEE transactions on Pattern Analysis and Machine Intelligence, 40(4):958–972, 2017
work page 2017
-
[5]
ShapeFit and shapeKick for robust, scalable structure from motion
Thomas Goldstein, Paul Hand, Choongbum Lee, Vladislav Voroninski, and Stefano Soatto. ShapeFit and shapeKick for robust, scalable structure from motion. InEuropean Conference on Computer Vision, pages 289–304. Springer, 2016
work page 2016
-
[6]
Lie-algebraic averaging for globally consistent motion estimation
Venu Madhav Govindu. Lie-algebraic averaging for globally consistent motion estimation. In 2004 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, pages 684–691. IEEE Computer Society, 2004
work page 2004
-
[7]
Paul Hand, Choongbum Lee, and Vladislav Voroninski. ShapeFit: Exact location recovery from corrupted pairwise directions.Communications on Pure and Applied Mathematics, 71(1):3–50, 2018
work page 2018
-
[8]
Rotation averaging.Interna- tional Journal of Computer Vision, 103(3):267–305, 2013
Richard Hartley, Jochen Trumpf, Yuchao Dai, and Hongdong Li. Rotation averaging.Interna- tional Journal of Computer Vision, 103(3):267–305, 2013
work page 2013
-
[9]
A robust translation synchronization algorithm
Zihang He, Hang Ruan, and Qixing Huang. A robust translation synchronization algorithm. In 2025 International Conference on 3D Vision (3DV), pages 276–285. IEEE, 2025
work page 2025
-
[10]
Xiangru Huang, Zhenxiao Liang, Chandrajit Bajaj, and Qixing Huang. Translation synchro- nization via truncated least squares.Advances in neural information processing systems, 30, 2017
work page 2017
-
[11]
Robust group synchronization via cycle-edge message passing
Gilad Lerman and Yunpeng Shi. Robust group synchronization via cycle-edge message passing. Foundations of Computational Mathematics, 22(6):1665–1741, 2022
work page 2022
-
[12]
Gilad Lerman, Yunpeng Shi, and Teng Zhang. Exact camera location recovery by least unsquared deviations.SIAM Journal on Imaging Sciences, 11(4):2692–2721, 2018
work page 2018
-
[13]
Cycle-Sync: Robust global camera pose estima- tion through enhanced cycle-consistent synchronization
Shaohan Li, Yunpeng Shi, and Gilad Lerman. Cycle-Sync: Robust global camera pose estima- tion through enhanced cycle-consistent synchronization. InAdvances in Neural Information Processing Systems, 2025
work page 2025
-
[14]
Huikang Liu, Man-Chung Yue, and Anthony Man-Cho So. A unified approach to synchronization problems over subgroups of the orthogonal group.Applied and Computational Harmonic Analysis, 66:320–372, 2023
work page 2023
-
[15]
Fusing directions and displacements in translation averaging
Lalit Manam and Venu Madhav Govindu. Fusing directions and displacements in translation averaging. In2024 International Conference on 3D Vision (3DV), pages 75–84. IEEE, 2024
work page 2024
-
[16]
Robust camera location estimation by convex programming
Onur Ozyesil and Amit Singer. Robust camera location estimation by convex programming. InProceedings of the IEEE Conference on Computer Vision and Pattern Recognition, pages 2674–2683, 2015
work page 2015
-
[17]
A survey of structure from motion*.Acta Numerica, 26:305–364, 2017
Onur Özyeşil, Vladislav Voroninski, Ronen Basri, and Amit Singer. A survey of structure from motion*.Acta Numerica, 26:305–364, 2017
work page 2017
-
[18]
David M Rosen, Luca Carlone, Afonso S Bandeira, and John J Leonard. Se-sync: A certifiably correct algorithm for synchronization over the special euclidean group.The International Journal of Robotics Research, 38(2-3):95–125, 2019. 12
work page 2019
-
[19]
Schönberger, Silvano Galliani, Torsten Sattler, Konrad Schindler, Marc Pollefeys, and Andreas Geiger
Thomas Schöps, Johannes L. Schönberger, Silvano Galliani, Torsten Sattler, Konrad Schindler, Marc Pollefeys, and Andreas Geiger. A multi-view stereo benchmark with high-resolution images and multi-camera videos. InConference on Computer Vision and Pattern Recognition (CVPR), 2017
work page 2017
-
[20]
Estimation of camera locations in highly corrupted scenarios: All about that base, no shape trouble
Yunpeng Shi and Gilad Lerman. Estimation of camera locations in highly corrupted scenarios: All about that base, no shape trouble. InProceedings of the IEEE Conference on Computer Vision and Pattern Recognition, pages 2868–2876, 2018
work page 2018
-
[21]
Message passing least squares framework and its application to rotation synchronization
Yunpeng Shi and Gilad Lerman. Message passing least squares framework and its application to rotation synchronization. InInternational Conference on Machine Learning, pages 8796–8806. PMLR, 2020
work page 2020
-
[22]
Photo tourism: exploring photo collections in 3d
Noah Snavely, Steven M Seitz, and Richard Szeliski. Photo tourism: exploring photo collections in 3d. InACM siggraph 2006 papers, pages 835–846. 2006
work page 2006
-
[23]
Robust global translations with 1DSfM
Kyle Wilson and Noah Snavely. Robust global translations with 1DSfM. InEuropean Conference on Computer Vision, pages 61–75. Springer, 2014
work page 2014
-
[24]
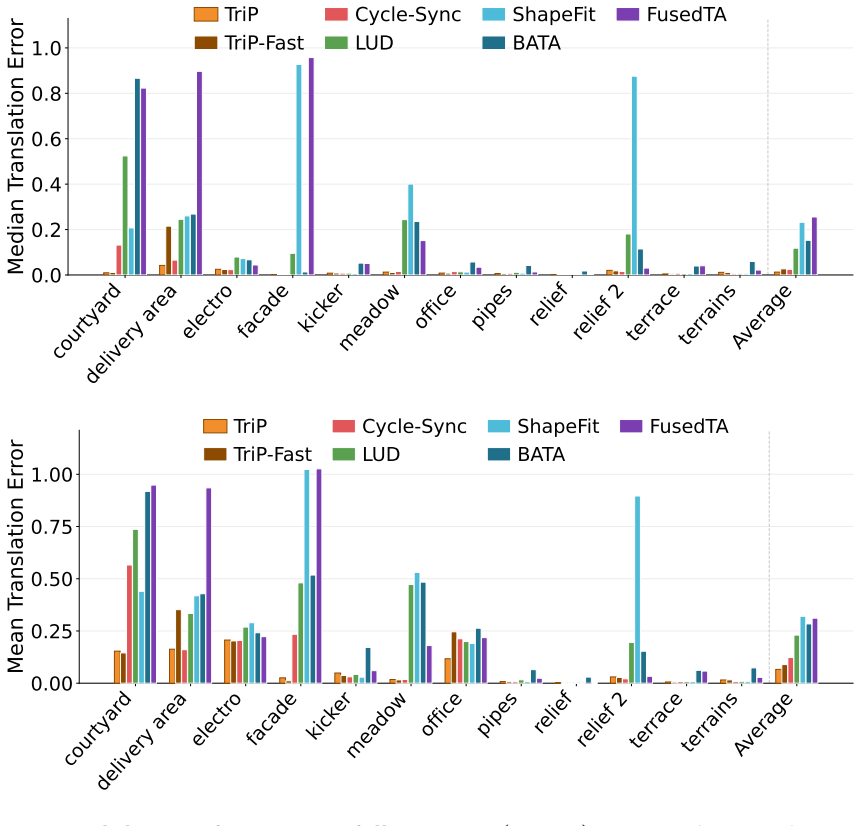
Bingbing Zhuang, Loong-Fah Cheong, and Gim Hee Lee. Baseline desensitizing in translation averaging. InProceedings of the IEEE Conference on Computer Vision and Pattern Recognition, pages 4539–4547, 2018. 13 Appendix A More Results for ETH3D This section provides detailed per-dataset ETH3D [19] results complementary to the main paper. All methods are alig...
-
[25]
1/2 The maximizers area = 1for Cauchy, a = 1/ √ 2 for Welsch, a↑ 1for hard threshold/TLS, and a= 1/ √ 5for Tukey. F.4 Bad profiled force Lemma F.9(Bad profiled force is sparse and uniformly small).Fixσ > 0and z0. Let zb ∈Z b(z0; σ) be an attaining nuisance minimizer. Define the bad residuals rf =a ⊤ f z0 +c ⊤ f zb −g f , f∈ C b, and the bad scores sf =ψ σ...
-
[26]
Sinceb c has one+1entry and one−1entry, |rc(z0)| ≤2∥e∥ ∞ ≤aσ
=b ⊤ c e. Sinceb c has one+1entry and one−1entry, |rc(z0)| ≤2∥e∥ ∞ ≤aσ. By profile-admissibility, θc := ( ψσ(rc)/rc, r c ̸= 0, ψ′ σ(0), r c = 0, satisfies θc ∈[m(a),1] after the harmless normalization in which the clean quadratic slope is at most one. Let Θ = diag(θc :c∈ C 0). Then the clean score contribution is B⊤ 0 ψσ(B0e) =B ⊤ 0 ΘB0e. By Lemma F.9, ev...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.